本年から代々木オリセン→大田区総合体育館へ場所を移した学生ロボコン。これまでより観客席、ピットエリアともに広く、セットも豪華。日本でのABUロボコンへ向けた準備段階、とも受け取れる。
7月9日(土)13:30現在、フィールドではセンサチェックが進んでいる。その後のテストランと併せ、記者が見ることができたチームだけで恐縮ながら、気になった点を挙げる。
センサチェック

1回目、2回目のセンサチェックでは、どのチームもエコロボットの動作は順調に見えた。ハイブリッドロボットでの駆動ではなく、手で押してのライントレースだが、手応えがあった様子だ。
ハイブリッドロボットのセンサチェックは、エコロボットの駆動のための移動チェックとポールに登る動作のチェックが半々、というところだろうか。
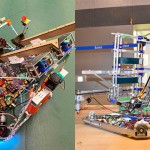
工学院大学のポール登りは、間欠的な、人がよいしょよいしょと登るようなリズムだったのがユニーク。尺取り虫式。
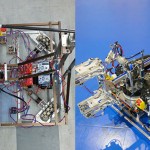
大阪工業大学は、機体がかっこいい! 「ロボット」としてのロマンを感じる設計だ。……が、センサチェック中に機体から発煙! ぜひ動いているものを見たいが……、どうか。
熊本大学のエコロボットは、タービン式。単なる「風を帆で受けて進む」わけではなく、「風でタービンを回し、その力をギアで駆動輪に伝える」仕組み。帆もあるのだが、「風をタービンに集める」意味合いが強いようだ。その他にも、これに近い仕組みを採用したチームがいくつかあった。
全自動機は、センサチェックとは言ってもひと通り走らせることになる。テストランと変わらない。
記者が確認できたのは、まず、東京大学。こともなげにChai-Yoを決める。おそらくタイムは10秒台。全員がきびきび動き、3分程度の短い制限時間の中で、セッティングとChai-Yoを3回繰り返せるほどの精度だった。エコロボット駆動の前半が磁力(斥力)で、後半は風力というハイブリッドなシステムが特徴。
豊橋技術科学大学も全自動。センサチェックから走らせる。ハイブリッドロボットの移動が速い。やはり足回りの内圧を下げグリップを強化する仕組みがあると見た。タイム的には、東大と遜色ないレベルだろう。
名古屋工業大学も、全自動組。2014年ABUでブランコ競技で活躍した高出力のファンがうなりをあげる。1度目はRiver=クランクエリアで引っかかってしまう姿が見られたが、その後はChai-Yoを決めていた。
テストラン
テストランから、ギャラリーが増える。他校の偵察だ。
特にテストラン1走目の東京大学は、観客席に緊迫感が生まれるほどの出来。しかし、プロペラの受け渡しがうまくいかない光景が見られた。テストランからスピードを追い求める段階に入ったのか。もし成功していれば、おそらく10秒台、それも前半は固い。
豊橋技術科学大学も、プロペラの受け渡しに手こずる。しかしほどなくおそらく10秒台のChai-Yoを決め、会場からはかすかにどよめきが。ハイブリッドロボットがポールから降りてくる際、ゆっくりと制御された状態で降りてくる。この姿からも、完成度が高いことがわかる。
三重大学は、いわゆるライントレースではなく、エンコーダによる自己位置推定と赤外線距離センサによるフィールド枠のトレースを行っているとのこと。ハイブリッドロボットの移動は自動で、その間ドライバーは風力の調整に集中できるという。非自動機ゆえのタイムロス(いったんセッティングエリアその2に戻らなければならないルール)があるが、Chai-Yoを決めていた。手堅い印象。
九州大学。エコロボットの帆にある絵は、マーカー。ハイブリッド側からこの画像を認識し、この箇所に風を当てる。全自動機に搭載される仕組みだろう。ポールの登り方は、尺取り虫的なもの。どんなメリットがあるのか、聞いてみたい。
早稲田大学。見事バドミントン決戦を制した2015大会は、リーダーの激しい声が印象的だったが、今回は少し違う。とは言え、やはり全員がキビキビと作業をこなすことには変わりない。全自動機。スピードにこだわった故か、エコロボットがコースから落ちてしまったり、ハイブリッド機の軌道がずれ、フィールド枠をこすってしまう姿が見られた。その後はおそらく手動に切り替え(ることもできるようだ)、調整に時間を費やしていた。
長岡技術科学大、ピットが気になった。自校エリアに掲示板としてホワイトボードを持ち込み、各種の注意事項、連絡事項を共有していた。また、大きな時計を設置し、タイムマネジメントにも気を使っていた。今回のピットエリアには時計が無く、役に立つに違いない。どのチームも、すぐに取り入れられるティップスと言えるだろう。テストランでは完璧なかたちでのChai-Yoは見られなかったが、ポテンシャルは秘めている。
横浜国立大学。手動機。エコロボットは風力をタービン経由で駆動輪に伝える仕組みだが、そこに風を当てるのが難しい印象。うまく当たれば、スムーズに進むのだが……。
東京農工大。エコロボットの駆動がユニーク! 「アラゴーの円盤の現象を用いてエコロボットのフライホイールを加速、円盤に貯めたエネルギーでフィールドを自走」とのことだが……、要追加取材。大枠としては、エコロボットの円盤を高速回転させ、その力を駆動輪に伝え進む、ということだろう。その高速回転を生むのは、通常なら接触式のはずだが、ルール上それは許されない。ということは、電磁気力で回転を生み、スタート時に貯めたエネルギーだけでコース下り部分まで進むということか。アツい。
京都工芸繊維大学は全自動機。ただ、調整が進まず、Chai-Yoは見られなかった。
名古屋工業大学。2014年の優勝の時の総合力は、今も受け継がれているようだ。コース後半のスピードはトップクラス。しかし、前半に課題があるようだ。調整を繰り返していた。
東京工業大学。ハイブリッド機は、いわゆる掃除機マシン。吸引ファンでフィールドに吸い付き、スピードを高める仕掛け。豊橋のお家芸的ギミックだ。最後のプロペラ取付けの動作が、「射出」のように見えた。リスキーな選択のように見えたが、果たして真意は?
大阪工業大学。センサチェック時に煙を吐いていたが……、復活なるか。……動いている。極めて低い姿勢の3本足。これはやはりかっこいい。タチコマ。そしてエコロボットの駆動は……、まさかの非接触充電! そしてポールを登る姿は……、これは……、ぜひ動画でご覧頂きたい。撮影の機会を探っていく。
長崎総合科学大学。手動で、安定した動作。シンプルなレーザーポインタでの送風の狙い付けを行っている。
金沢工業大学。前半のテストを繰り返す。速い。しかし、スピードを追求した結果か、エコロボットがたびたびコースアウトしてしまう。この調整がうまくいけば、かなりのスピードだ。ひとつひとつの動作がまったく「間」がなく行われる。目指すはABU、打倒中国、というところか。
北見工業大学。間違いなく軽量級の機体が、スピードへの期待を想起させる。大きめのファンと金網ガードが独特の音。コース前半に苦労していたようだ。
17:20。この後、テストランは2順目へ向かう。