©Saiko et al., 2012
※この記事はDevicePlus.com(英語版)のこの記事を日本語訳したものです。
昆虫マイクロボットは今や現実のものとなりました。重さ0.080 g、全長5.0 mm足らずの昆虫生体模倣マイクロボットは、6本脚でアリさながらに這い回ることが可能です。日本大学の齊藤博士の研究室では、人工ニューラルネットワークを実装することで、スムーズでまさに昆虫のような切り替え動作による運動行動を生み出すべく研究を続けています。
詳しい内容に入る前に、生体模倣技術とは何か、ということについてお話ししましょう。
バイオミメティクス(生物模倣)とは?
「バイオミメティクスという言葉は、Otto H Schmitt(Schmitt 1969)の造語であり、自然界のメソッド、メカニズム、プロセス等を研究、模倣しようとする技術の総称である。自然の持つ力は多くの分野で人知をはるかに超えるものであり、その機能や特性を応用することは、テクノロジーの発展に大きく寄与することになるだろう。」-Bar-Cohen、2006年。
バイオミメティクスは、未来のテクノロジーにとって非常に大きな可能性を有しています。今回紹介しているマイクロボットは、昆虫、特にアリの生物物理学的メカニズムからヒントを得て微小規模で開発されました。アナログICを使用して人工ニューラルネットワークを構成し、それによって「駆動波形」つまりパルスを生成し、それがマイクロボットの運動力となっています。
どのようなロボットであれ、歩く、這う、揺れる、ジャンプする等の運動を実行させようとすれば、アクチュエータ(駆動装置)が必要となります。アクチュエータはロボットに運動を実行させるメカニズムであり、生命体にとっての筋肉に似た役割を持っています。アリによく似たこのマイクロボットは、埋込形状記憶合金製回転型アクチュエータを使用して製作されています。アクチュエータ、人工ニューラルネットワークをシリコンウェハを用いて組み立てた後、微小電気機械システム(MEMS)微細加工技術を用いて一体化させています。
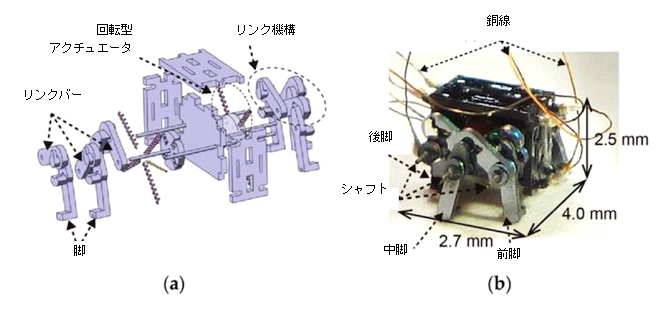
図1. MEMSマイクロボットの微小機械構造:(a)分解図(b)完成図/
©Saito et al., 2016
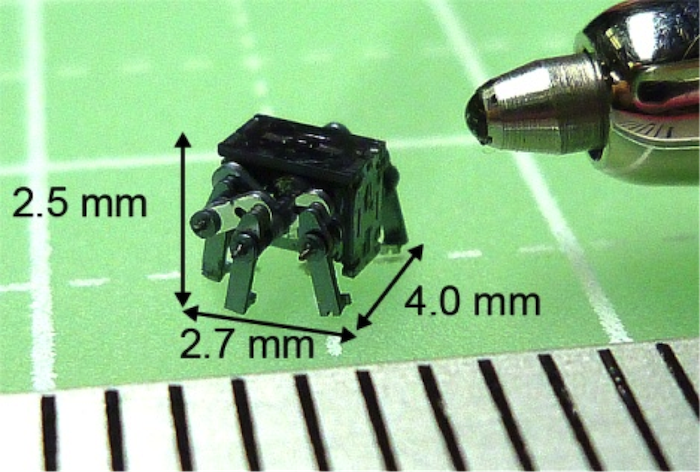
図1の通り、リンク機構は3本の脚、シャフト、リンクバーで構成されています。中脚はローターに取り付けられているため、中脚とローターの回転相は同一です。前脚と後脚はリンクバーによって中脚に取り付けられているため、90°の位相変位が可能となります。マイクロボットの大きさは4.0 x 2.7 x 2.5 mmで、信号線8本、GND線2本が接続されています(図1b)。信号線を人工ニューラルネットワークに接続すると、この小型ロボットは這うことが可能となります。
このMEMSロボットが特殊であるのは、ソフトウェアではなくハードウェアで構成された大型人工ニューラルネットワークモデルを採用している点です。研究者らによると、処理速度、メモリ容量等のコンピュータ性能に鑑みると、大型の数理的(ソフトウェア)ニューロンモデルの実装は非常に困難だということです。一方ハードウェアニューロンモデルでは、ニューラルネットワークの連続処理、高速非線形処理が可能となります。またIC技術と相まって、回路サイズの縮小も可能であるため、小型あるいはミリ単位のプロジェクトにおいては非常に有効です。こういった理由から、ハードウェアニューロンモデルが採用されています。
ニューラルネットワーク、これがなぜそんなに重要なのでしょうか?またマイクロボットにはニューラルネットワークの実装が必須というその理由は何なのでしょうか?まず、「順応性のある」制御システムを実現するには、ニューラルネットワークが必須であるためです。言い換えると、ニューラルネットワークによってこそ、ロボットの動きは自動的ではなく、特定の状況下におけるイベントに反応して行動を起こすことが可能となるのです。その時々でロボットは学習し、収集した情報に基づいて決定を下すことができるようになるのです。
パルス形ハードウェアニューロンモデルを最大限利用することで、ミリ単位のこのマイクロボットはアリのように這うことが可能となりました。パルス形ハードウェアニューロンモデルはクラスIIニューロンモデルであり、閾値、不応期、時空間加算性等、実際の生体ニューロンと同様の機能を有しています。さらにこのモデルでは、連続活動電位の生成も行います。
ハードウェアニューロンモデルが「駆動パルス」を出力し、このパルスがロボットの人工筋肉であるワイヤを作動させます。注目すべき点として、ロボット制御は、生体ニューロンへ送られるパルスに類似した連続パルス波によって行うもので、ソフトウェアプログラムやA/Dコンバータによるものではない、ということです。
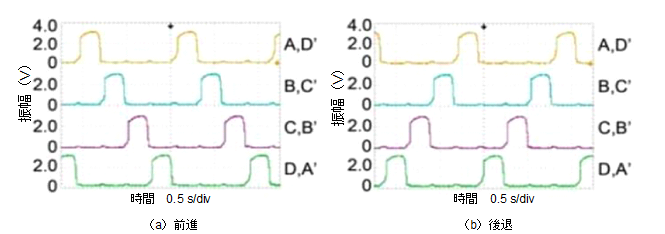
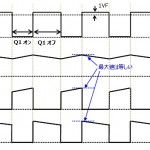
図2. ハードウェアニューロンモデルの出力波形の例/©Saito et al., 2012
図2に示す通り、ハードウェアニューロンモデルは前進、後退いずれの波形も出力することが可能です。波形からの出力信号が、銅線製人工筋肉に送信されます。
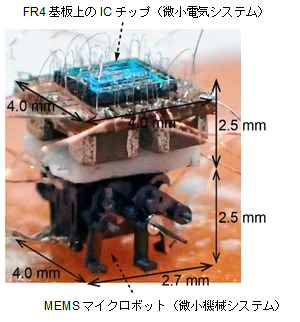
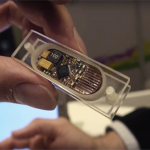
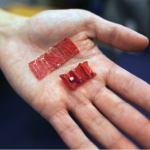
図3. 組み立てられたMEMSマイクロボット/©Saito et al., 2016
重さ0.02 gの微小機械システム(下)の上に人工ニューラルネットワーク微小電気システムICチップ(上)を載せ、ICチップをFR-4に固定します。MEMSマイクロボットの移動速度は4 mm/分。上部にFR-4に固定したICチップを載せていない場合、最高速度は26.4 mm/分です。ここで注目すべき点は、カレントミラー回路です。形状記憶合金アクチュエータが回転運動を生成するためには電流が必要です。そのため電圧波形から電流波形に変換する必要があります。
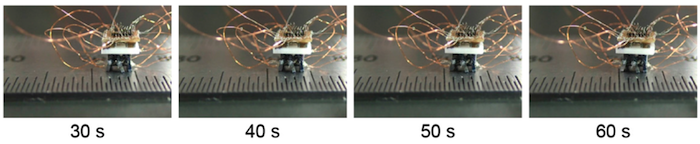
図4. MEMSマイクロボットの移動/©Saito et al., 2016
動画のように、この昆虫生体模倣MEMSマイクロボットは、アリに類似した移動行動が可能です。動きが遅いからといって驚かないでください!研究者らの説明によると、この速度の遅さの原因は、形状記憶合金からマイクロボットの機械部品への伝導熱だということです。高速連続回転運動を生成する新型回転アクチュエータについては次の公表で紹介されています。
ご意見、ご質問はGoogle +まで。フォローお願いします。次号では、形状記憶合金(SMA)アクチュエータ、圧電(PZT)アクチュエータの2種類のアクチュエータを搭載した小型6脚MEMSマイクロボットをご紹介します。