| キャプテン名 | 岸田真幸さん |
|---|---|
| 出場者名 | 松永成偉人さん、棚瀨貫太さん |
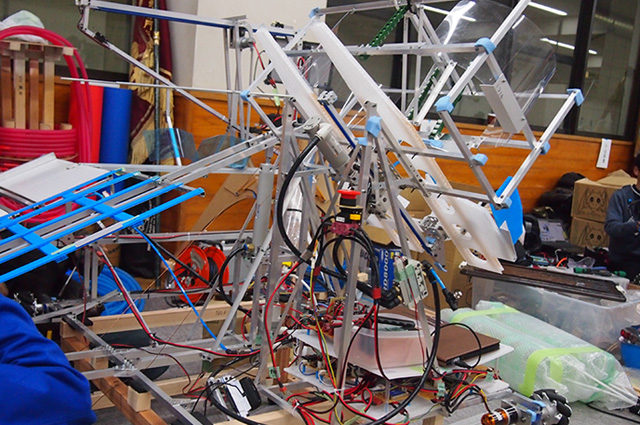
| ロボット名 | QuoitsZwei(クオイツヴァイ) ドイツ語で「2つの輪投げ」 2種の発射機構があることから |
| ロボットのコンセプト | 画像処理による正確な投射機構を軸とした高精度な半自動システムの実現。 |
| キーデバイス | 2種の発射機構、カメラシステム+コントローラユニット |
| こだわったポイント | 小径の輪を正確にポールに届けられるような画像処理と人との連携。 |
| 戦略・必勝パターンは? | 近距離のポールを自動システムで速やかに得点につなげ、正確な投射で中長距離に対処する。 |
| ベストスコア・最速タイム | 80秒 |
| 他のチームを見ての感想 | 大分高専(初戦)+ |
| チームのHP等 | http://www.gifu-nct.ac.jp/mecha/inaba/ |