2024年6月9日(日)、日本工学院アリーナ(東京都)で「NHK学生ロボコン2024」が開催された。ローム賞を受賞したのは、金沢工業大学「鷹蓮(オウレン)」。メンバーの3人にインタビューを行い、ロボットの開発や、大会当日の様子についてお話を聞いた。
33回目となる今大会は、全国から事前審査を勝ち抜いた18チームが出場し、「ABUアジア・太平洋ロボットコンテスト2024ベトナム大会」(8月に開催)出場をかけて、白熱した戦いが繰り広げられた。
テーマは、主催国のベトナムの棚田で行われるコメ作りを模した「Harvest Day」。棚田の風景をモチーフにした3段のフィールドを舞台に、ロボットが稲の植え付けから収穫に取り組む。参加チームを驚かせたのは、大会史上初めて、完全自動ロボットで競技に臨むという課題だ。最新技術を取り込んだAIの搭載、ロボット自らが画像解析するなどして、収穫した籾(モミ=ボール)をサイロに入れ、Vゴールを目指す。
メンバーが操縦する手動ロボットのR1は、まず、ラックにある12本の苗を取って、プランティングゾーンのサークルの中に植えたあと、エリア2(ハーベスティングゾーン)に移動。苗を植えた数を上限に、籾と空籾を交互に投げ入れて得点する。完全自動ロボットのR2は、エリア3(ストレージゾーン)で、6個の籾と10個の空籾に加え、エリア2から投げ入れられた籾から、色を識別して籾だけを選び取り、サイロ(かご)に入れたら収穫完了、という複雑な動作を求められるゲームだ。
※ABUロボコン2024のルールと大会の様子はこちら
■チーム紹介
今大会は3年生のメンバーを中心に、回路班12名、制御班21名、機構班28名の計61名で臨んだ。チーム名の「鷹蓮」は、大学のキャラクターの「鷹」とベトナムの国花「蓮」から名付けた。
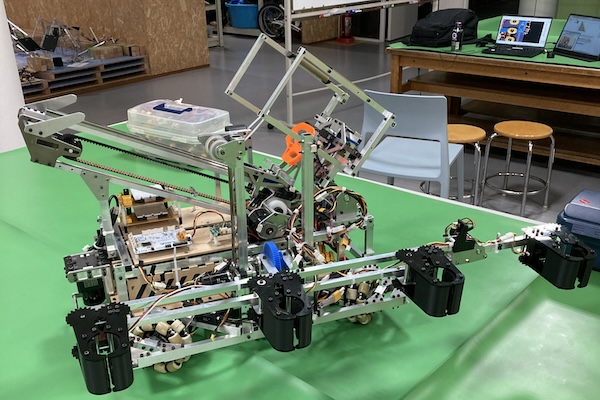
苗の回収と配置、ハーベストを担当するR1と、ストアを担う完全自動操縦のR2の2台で臨んだ。R1の特長は、何といっても苗を8本同時に持つことができる機構。一度に刈り取れる数は出場チームの中でも最多となるこの機構は、大会でもスムーズな動きを見せ、序盤から効率的に得点した。
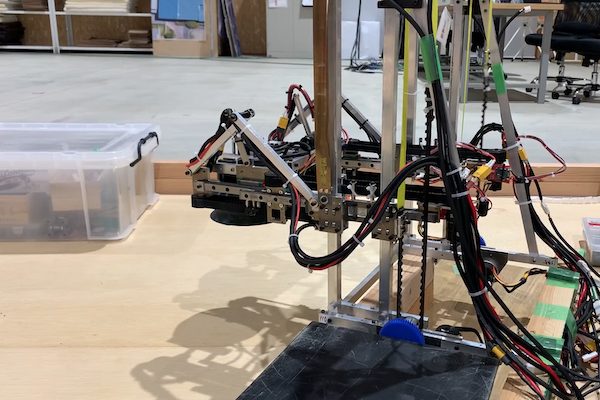
R2は、カメラで色を判別し、モータを用いた吸引機構でフィールドの籾を回収。R1がハーベストし、バウンドした籾を直接回収する機構を搭載した機体は出場チーム中でも数少なく、非常にユニークだ。一方、チームにはもともと画像識別の技術がなかったため、ルール発表後から開発に着手し、なんとか実装にこぎつけた。

NHK学生ロボコンに使用した機体 (左:R1、右:R2)
■手探りで始まった挑戦
2023年8月、発表された完全自動ロボットが必須というルールに、メンバーは動揺した。リーダーの山﨑さんは「手動と自動を混ぜた技術は例年搭載していたけど、ボタン一つで動く完全自動に取り組むのは初めて。正直、できるのかな……と思いました」と振り返る。
まず着手したのは、ロボットの位置認識の仕組みの構築だ。制御は先輩のソースコードを参考にし、モータは自己位置を把握できるよう処理をした。一方、「何かを射出する」というルールがここ数年多かったことから、昨年大会の「輪投げ」の技術を生かすことができた。
画像識別については、「本当に技術開発が間に合うのだろうか」という不安があった。そのため計画当初、混在する2色のなかからボールを取るのではなく、人が操作するR1が必要な色のボールを取り、R2に受け渡すという戦略をベースに開発に取り組んだ。画像識別の技術開発は、画像処理専門のメンバーがいなかったため、文献を調べて学び、ロボコン以外のプロジェクト関係者にも質問をするなどして地道に研究した。

定期的にミーティングを行い、密に連携を取った
■相反する設計の両立を目指す日々
今大会は、機構展開前の機体サイズを例年よりも小さい1辺700mm以下の立方体に収める必要があった。そのため、8本の苗を同時に持つ機構やピッチ変更が可能な射出機構、ロジャーアームなどの密度の高い機構を採用。基板を立ててスペースを確保したり、配線が駆動に干渉しないよう専用のガイドを設けたりするなど何度も試行錯誤を繰り返し、いかに「機構や基板を詰め込むか」「小型化するか」「整備性を担保するか」という相反する設計の両立に苦心した。
-
- 製作中のR1
-
- ロジャーアーム&吸引機構実験機
その結果、多くの機構要素とアクチュエータをロボットに使用していたこともあり、故障が頻発してしまう。さらに、「詰め込んだ」ことにより、機構や配線が密集しているため、故障個所を探すのにも時間がかかり、メンバーたちは大会当日まで、修理にかなり苦戦することになった。
想いの詰まった機体は、なんと大会直前に……。後編に続く!