(左)エコロボット制御担当の高橋亮さん (右)チームリーダーであり、エコロボット担当の田中敬さん
「勝てるチームのつくりかた 学生ロボコン2016覇者・東大RoboTechの場合 前編」からの続き。東大RoboTechの田中さん高橋さんに、どうやって勝てるチームを作ったのか、突っ込んだ質問をぶつけた。
◆ ◆ ◆
──その体制は、うまく機能しましたか?
田中:はい、今回に関しては、良かったと思います。1機のロボットのリーダーと言っても、普通は設計したりCADをいじったり加工したりっていうリーダーが多いと思うんです。でも今回は、一切手を動かしていません。
高橋:ホントに一年間、まったく加工なんてしてないんじゃないか。
田中:してないですね。加工もCADも。これは今までになかったことです。今年の新たな試みでした。
──その手を動かさない班長制度は、具体的にはどういったところが良かったのでしょうか?
田中:例えば、何か問題があった時、よく「メカで解決するか制御で解決するか」という話になると思います。これって簡単に言ってしまいますが、実際にはいろいろな要素が絡まって、難しい判断を迫られます。そこを、班長という判断だけをする人がいることで、全体として精度が高まったと思います。
高橋:これはありがたかったですね。やっぱり常にアタマが働いている人がふたりぐらいいないといけないと思います。僕なんか、1月とか2月とかは本当に寒くて、何も考えたくありませんでしたから(笑)。そんな時に考えてくれる人がいることで、僕は作業に没頭できる、という。
田中:高橋君は、こういうところがいいんですよね(笑)。本番の時も、適度な緊張で……。全員が気を張っていたら、持ちませんからね。
──そのアタマと手を分けるというシステムは、誰が言い出したことなんですか?
田中:部長です。今回はうまくいきましたね。ただ、常にこれが有効かと言うと、そうでもないと思います。部の人数が多いからこうしたというところもありますし、本当にスーパーな人がいたら、その人が自分で作った方が強いかもしれませんし。マイクロソフトのやり方がいいのかアップルのやり方がいいのか、みたいな。実際に、2017大会に向けては、必ずそうするかは決まっていません。仮の体制はありますが、まだいろいろ模索しているところです。
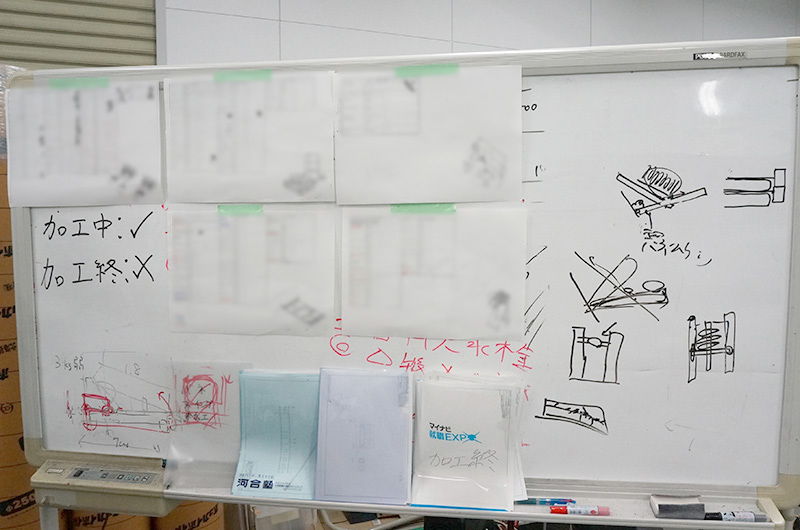
図面などが張り出されたホワイトボード。下段のクリアファイルには、各機構ごとで未加工のパーツの図面がファイルの中に入っており、加工が終わると加工終のファイルへ入れる
──その他、うまくいったシステムや制度、やり方みたいなものはありますか?
高橋:記録の残し方、は良かったかもしれません。だいぶ変わったというか、だいぶしっかりやるようにしたというか。作業日誌をすごくきちんと残したんですよ。それを使いやすいように自分達でカスタマイズしたwikiに上げるようにしました。それまでは、各屋ごとに記録をとるシステムがあったんですが、それを統一しました。
田中:例えば、ある箇所が壊れたとします。しばらくしてまた壊れた。そしてまた……、となった時、きちんと記録が残っていれば、壊れる周期、その部品の寿命が見えてきたりします。それが1ヶ月なら、大会前2週間ぐらいで取り替えておこうか、という判断ができます。
高橋:高速化の段階では、ハイスピードカメラも使っていました。これも記録を残すことの一部ですね。120か240fpsのGoProを使いました。専用の架台を付けて、ハイブリッドとエコの、磁石が当たる部分を主に撮っていました。両機のズレや当たり具合みたいなところは、目視ではまったくわからないんですよね。それをスロー動画で見ることで、実際にどんな状態になっているかが良くわかりました。
──つまり、ログですね。
田中:はい。チームリーダーとしては、本当は時間をかけて判断したいことがたくさんありますよね。それを、実際にはその場ですぐに判断しなくてはならなかったりします。この回路ボックスを変えるかどうか、いつもより速いモードでいくのか、いつも通りのモードでいくのかどうか。これが相当に心臓が痛くなるようなことなのですが、ログを残したりテストランをたくさんやったことに心理的に助けられました。ミスが出ても、パっと直せるようになりました。
──チームの運営体制的なところではいかがでしょうか。
田中:そのテストランの管理は、かなりきっちりやりました。
高橋:シフト表ですね。誰がテストランの場に居るか、厳密に予定を立てていました。
田中:テストランって、当たり前ですがただやればいいって話じゃないですよね。どのタスクを中心にテストランをするのか考える人が居て、判断ができる人がいて、そしてその場で機体を調整できる人が必要です。しかもその時のタスクに沿った部分の調整を、です。その上で、テストランの内容が濃くなる。それをできるように、部長と班長ふたりがローテーションして、試験やどうしても参加できない日をやりくりして、もちろん毎日やっていたらぶっ倒れてしまうし、そして実際に動かす人を調整して……ということをしていました。
──なるほど、そういう工夫をしたうえでの、濃い内容の2000回ということですね。では、逆に、うまくいかなかったところは?
高橋:練習場所は、マジメに確保した方が良かったと思っています。みんなで必死になって確保したわけではなく、何人かで、それなりに頑張ったんですが……、もっと強力にやった方が良かったと思っています。
田中:ファンが使える場所、ですね(記者注:RoboTechは騒音問題によりフル風力を断念し、磁力を選択した経緯がある)。
高橋:あとは、この競技にどういう技術が必要かという見積が少し甘かったかもしれません。最初に何が必要かをちゃんと見積もっておけば、その後がもっとスムーズだったと思っています。
田中:僕はいろいろあって、この体制、結構危ういですよね。班長が倒れたら、まわんなくなっちゃいますもんね。僕はリーダーと兼務もしていましたし、磁石の発注なんかは、ひとりでやっていました。
高橋:ああ、あれは他の人では無理でしたね。
田中:磁石はもう僕しか……。あれは昨年の展示会か何かをのぞいたときに、パっとその場で名刺交換をして、メールのやりとりをして、というような、完全に僕ひとりの属人的な作業になっていました。何を発注するとかなぜそれを選んだとか、誰も知らなかった状態です。
高橋:コネクション、ですね。
田中:そして忙しくなって、しんどくなって、逆に他の人に伝えるべきことを伝えられなかったり。悪循環ですよね。
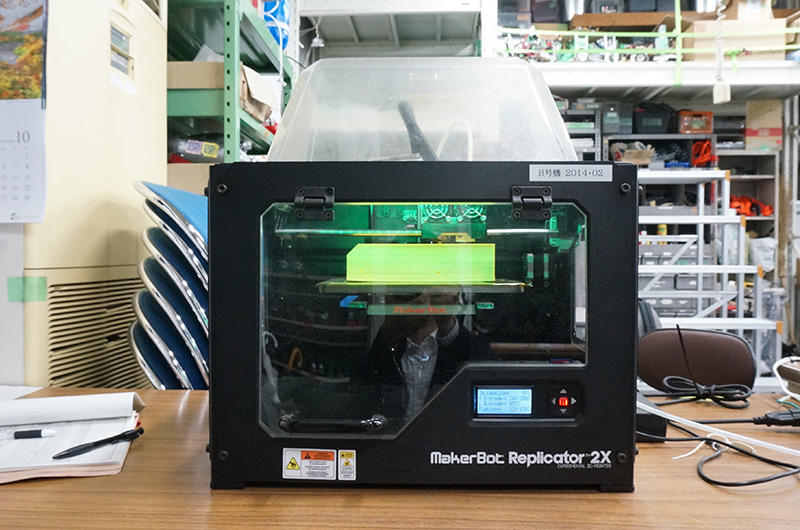
取材中ずっと稼働していた3Dプリンタ。来年のロボコンに使うパーツだろうか?
──開発中、意見がぶつかることもあったと思います。どう解決していましたか?
高橋:それは、第三者が入るのがいいんじゃないでしょうか。マシンの話は、班長が全部判断してましたね。
田中:ハイブリッドの方は、メカと回路、メカと制御でぶつかった時には、よく班長が整理していました。エコロボットは僕が班長ですが、僕の考えを伝えて、それが間違っていたら議論するし、僕の意見に納得してくれるならそれで、という感じです。
──自分で何かを作らない、判断するのが仕事という立場の人が居ることのメリットですね。とは言え会社なんかだと、声の大きい人とかエラい人とかの言うことが、悪手でも通ってしまったりして……。
田中:ああ、現場のことを知らない人が、っていう話ですね。その点僕らは一番現場に立っていましたから。
高橋:それは間違い無いですね。
──そもそもおふたりは、ロボットや電子工作やロボコンといったものに興味があったんですか? なぜロボコン部に?
田中・高橋:なんとなく、たまたま……(笑)。
田中:いや、ほんとに、パソコンですらニコニコ動画を見るかYoutubeを見るか、Wordはぎりぎり使えるぐらい、のもので。
──それは……、お聞きしなくてはならないことがたくさんあるような気がしますが、残念ながら時間が足りません。またの機会を作るとして、最後に今後の抱負を。
高橋:個人的には、入りたい研究室があるので勉強を頑張ろうかな、と思っています。それともちろん、RoboTechとして2017大会で勝てるように、技術的なことというよりは、どう進めれば良いかを考えないといけないということを伝えていきたいと思います。
田中:やっぱりどう後輩に引き継いでいくか、ですかね。もう自分がやっても意味が無いというか、大会に出るのは後輩ですから、その部分ですね。技術的なこともありますが、技術を使うのは後輩、「人」なので。
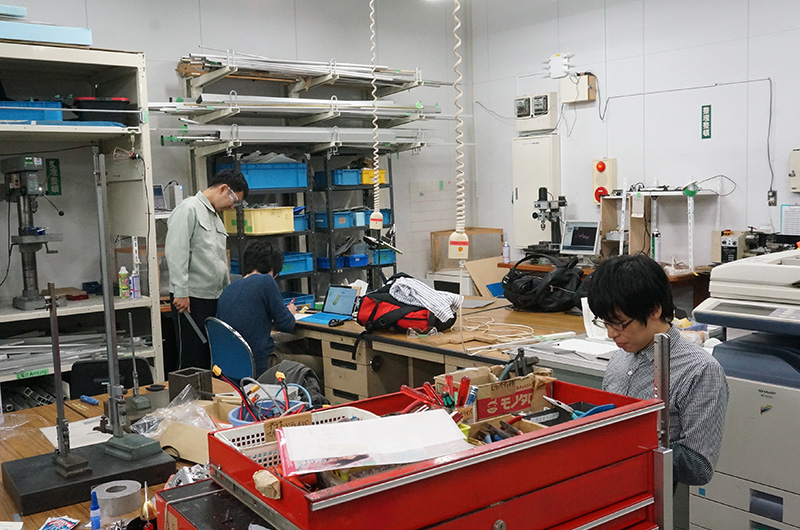

部室内の様子。RoboTechは、来年のロボコンに向けすでに動き始めている