世界中のロボコニストが注目する「ABUアジア・太平洋ロボットコンテスト2021」通称ABUロボコン。今年はコロナの影響もあり、オフライン開催を前提とした対戦形式からルールを大幅に変更し、オンライン開催となった。
目次

中国を主催国として、試合はライブストリーミングで実施。11カ国21チームが参戦した。感染症の状況も国ごとに違い、各国の事情に合わせてさまざまなハンデがある中で全チームがベストを尽くして競技した結果を、デバプラ取材班もオンラインで見届けた。
対戦形式からの変更点
開催のオンライン化に伴い、大幅なルール変更が実施された。以下に、学生ロボコン2021との違いをピックアップする。
フィールドデザインの変更
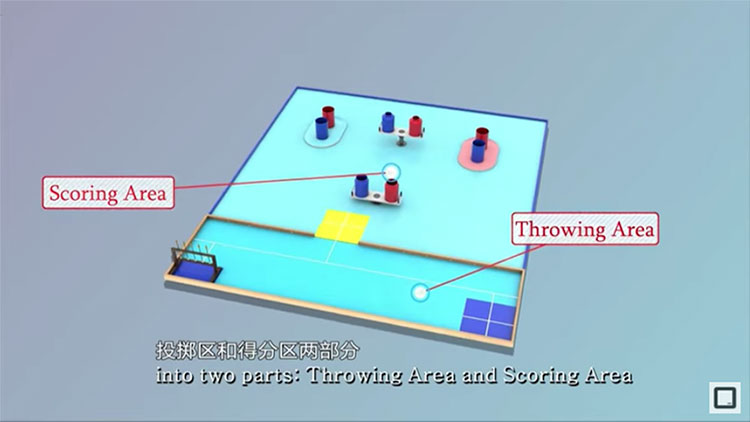
中国の古い図案である「太極図」をモチーフにしたバトルフィールドから、1つのチームが獲得点数を競うシンプルなフィールドに変更された。
TRが矢を投げる「投擲エリア」と得点ポットがある「得点エリア」がそれぞれ1つずつとなり、相手チームのフィールドがなくなる。
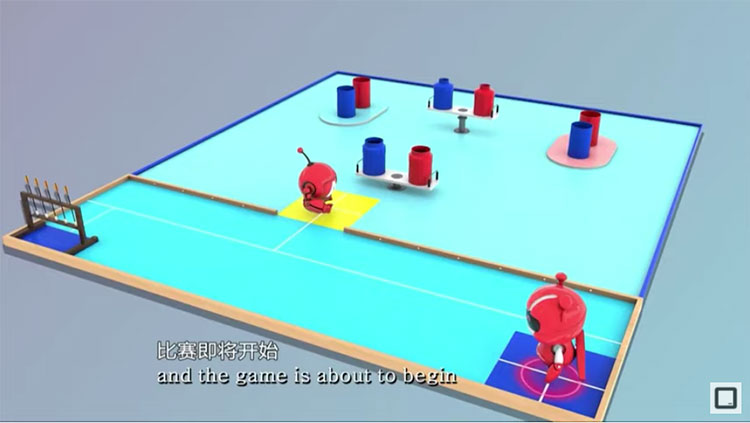
DRが「AR」に変更
学生ロボコンでは矢を投げる「TR(Throwing Robot)」と自軍の得点を補佐&相手チームの得点を阻止する「DR(Defensive Robot)」が動き、特にDRのトリッキーな動きが勝敗を左右する場面もあった。
オンライン大会ではDRが「Arrowkid Robot)(AR)」に変わる。対戦相手がいないため妨害の動作が不要になった。TRは学生ロボコンと同様に得点エリアには入れず、投擲エリアから矢を投げる。ARは全エリアへの侵入が可能で、投擲エリアからはTRと同様に矢を投げて得点を狙える。まとめると、以下のような役割分担が成り立つ。
【TR】
- 投擲エリア内を移動する
- スタート時点で最大5本の矢を保持する
- 投擲エリア内を移動する
- 投擲エリアから矢を投げる
- スタート時点で保持した矢を全て投げた後に、アローラックから矢を取る
- 投擲エリアに落ちた矢を拾う
【AR】
- 投擲エリアと得点エリア内を移動する
- スタート時点で最大5本の矢を保持する
- スタート時点で保持した矢を全て投げた後に、アローラックから矢を取る
- 得点エリア内の回転テーブルを動かして、TRの得点をサポートする
- 得点エリアに落ちた矢を拾う
- 拾った矢をTRに渡す/投擲エリアに移動させる
- ARが矢を拾い、スタートゾーンに戻ってから戦略的リトライをすることで人間が矢を「持ち直させる(装填状態にする)」ことは可能
得点条件
4つのテーブルに、それぞれ赤と青のポットが1対ずつ置かれる。どのポットに矢を入れても「1点獲得」となる。
「ツイン」達成条件
同じ得点テーブルに置かれた赤と青のポットに1本ずつの矢が入ると「ツイン」達成で8点獲得。1つのテーブルごとにツインは3対まで認められる。
例1:「青ポットに3本、赤ポットに2本」であれば「ツイン(8点)×2+単独得点(1点)×1」で17点の獲得
例2:「青ポットに4本、赤ポットに5本」であれば「ツイン(8点)×3+単独得点(1点)×3」で27点の獲得
「ゲームエンド」達成条件
20本の矢で全てツインを達成すると、最高で80点を獲得できる。3分の試合時間内に80点を獲得してチームメンバーが手を上げると「ゲームエンド」となり、その時点での残り秒数が「時間得点」となる。学生ロボコンの勝利条件とされた「グレートビクトリー」はなくなった。
順位確定条件
全チームが2回競技して、以下の条件で順位が決まる
- 獲得点数の平均が高かったチームが上位
- 獲得点数の平均が同じ場合、時間得点の平均が高いチームが上位
- 獲得点数の平均も時間得点の平均も同じ場合、より難易度の高い(開口部が狭い)ポットで得点したチームが上位
競技振り返り、日本チーム・各賞の受賞チーム紹介
以下に、全21チームのうち、日本から出場した2チームと優勝・準優勝・各賞の受賞チームを紹介する。競技記録はABUロボコンの公式YouTubeにアーカイブされているので、気になるチームがあればぜひ見てみてほしい。
長岡技術科学大学 5位・技術賞

学生ロボコンでは全試合でグレートビクトリーを獲得、決勝では全出場校中の最速タイムをたたき出して圧倒的な強さで優勝した長岡技大。ルール変更のためDRのトリッキーな妨害策が活用できなくなってしまい、ロボットを新しく作り直すことになった。
1回目、TRもARも順調な動きだ。アローラックからのピックアップや投擲の瞬間などで垣間見える、チームメンバーの連携も機敏で美しい。49秒でゲームエンド、十分に優勝を狙えるタイムだ!ゲームエンド直後、真っ先に緊急停止ボタンを押しに行く動きも技術者の鑑。
2回目は初手でTRが矢を落としてしまう。その後も数本の矢がポットに入らず、ARが回収に向かう。大きなタイムロスが発生してしまったが3回の回収と戦略的リトライで競技時間内にリカバリして、スタートから162秒(残り時間18秒)でゲームエンド。終了後にメンバーが悔しそうに崩れ落ちる。1本目を外した時点で優勝が厳しいのは分かっていたが、それでも粘り強く得点を重ねた。
何よりもチーム全体の、統率の取れた動きが美しかった。平均点80、時間得点74.5で5位を獲得、技術賞を受賞した。
東京大学 13位

学生ロボコンではDRの巧みな妨害が際立った東大RoboTech。コロナ禍で東京の活動が厳しく制限される中での開発にもかかわらず、操縦者の奮闘もあって日本では準優勝を勝ち取っている。ルール変更によって伝統の鮮やかな足回りをアドバンテージにしにくくなったが、どうか。
1回目、TRは搭載した矢とラックからの矢で順調に得点を重ねる。その後、1分過ぎにARがリトライのうえ、ポットを外して落ちた矢の回収に向かう。全体的な動きは悪くないがいつもの圧倒的な得点力までは見えず、少し苦しそうだ。それでも3分間で5つのツインを成立させ、46点を獲得した。
2回目はTR、ARともにスムーズな滑り出し、交差して舞う矢の軌道が美しい。1本だけポットを外してしまったがARが落ちた矢を回収し、リトライの後にゲームエンドを決めた。ゲーム開始から76秒、確実にミッションをクリアした。平均点63、時間得点52で13位となった。
優勝校:インドネシア Sepuluh Nopember Institute of Technology
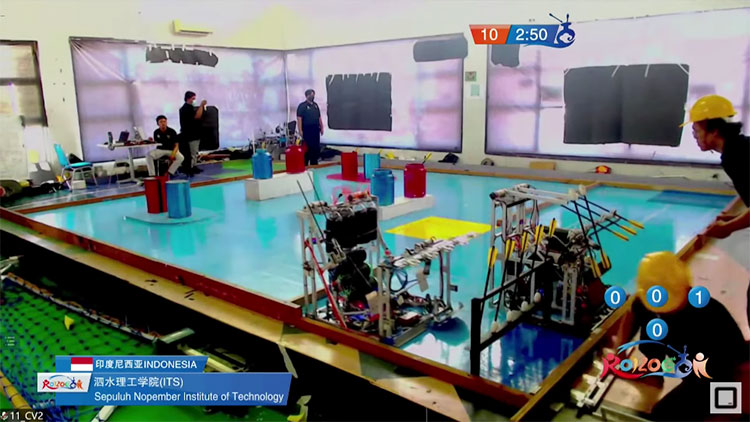
1回目、2回目ともに、TRとARが流れるように動き、最低限の挙動でアローラックから矢を回収して射出、百発百中でポットインしていった。軌道も安定しており、ポットに矢が吸い込まれていくようだ。
1回目は40秒、2回目は42秒でゲームエンド。平均点80、時間得点139で堂々の優勝を果たした。
準優勝:モンゴル Mongolian University of Science and Technology

TR、ARともに投擲エリアから矢を投げることに特化した自動機だ。TRは5本の矢を長手方向から回収するスライドバーの機構が目を引く。足回りもスタートゾーンから左右にしか動かない。ARは横手方向からアームでピックアップする機構で、TRとの衝突を避けるため得点エリア側のバッファに沿って動く。1回目は41秒、2回目は51秒でゲームエンド。2回目のタイムロスはアローラックに矢を補充する際に人間が手間取ってしまったためと思われる。惜しい。平均点80、時間得点134で準優勝。
アイデア賞:カンボジア Institute of Technology of Cambodia

強豪チームの多くがTRとARによく似た射出機構を採用する中で、全く異なる機構を採用していた。
TRはカタパルトのような射出レールがスライドするもので、ARもローラーの送り出しのような機構。特徴的な機構とチャレンジが評価された。
デザイン賞:香港 The Hong Kong University of Science and Technology
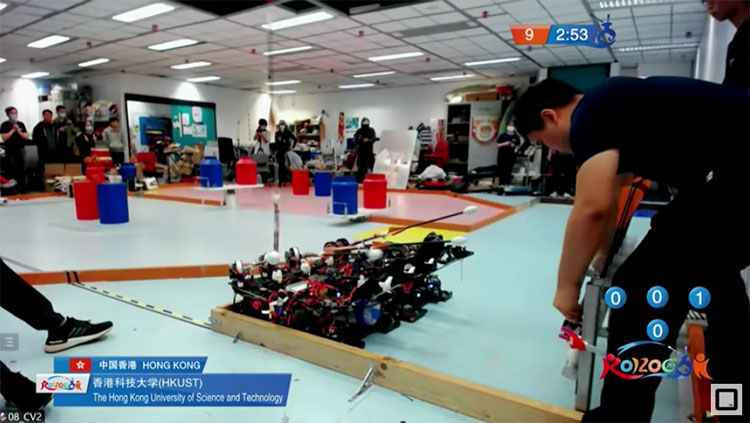
TRとARはとてもよく似ており、スタートゾーンの違いがなければ見分けがつかない。2台の低重心のマシンが横並びになって、交互に矢を投げる動作が非常にかわいい。他チームとは一線を画す、どこか生物的な美しさで納得のデザイン賞を獲得した。
ロボコン大賞:中国 Wuhan University
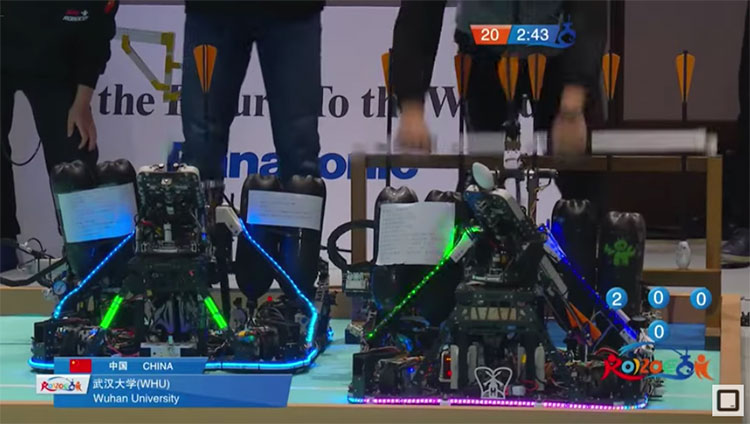
開催国らしく、まずフィールドが豪華! 素晴らしく整備された環境で、カメラワークも非常にリッチだ。射出機構のアップ画像がシンプルにかっこいい、これはうらやましいチームも多いのではないだろうか。
TRとARは低重心タイプで、地面を滑るように動く。狙ったポットに向かっての軌道のコントロールもかなり繊細にしている様子で、あまりにもスムーズに得点するため「ポットから矢が生えた」ようにすら見える。
1回目では31秒でゲームエンド、大会最速タイムをたたき出した。ただしARに矢のピックアップ機構がないのか? 外した矢は「諦めている」様子で、2回目はゲームエンドならず。平均点76.5、時間得点74.5で順位としては6位となったが大会最速タイムと圧倒的な強さが評価され、ロボコン大賞を受賞した。
ローム賞:タイ Nakhonnayok Technical College

ローム賞(ROHM AWARD)は、タイのNakhonnayok Tecknical Collegeが受賞した。ワイヤレス機能で異なる役割のTRとVR2台をコントロールし、正確な射出とスピーディな動きを見せ、ベストテンに食い込む活躍を見せたことが評価された。
まとめ・持続可能なロボット開発って何だろう?
あらゆるイベントが、ぎりぎりまで「開催するかしないか、オフラインかオンラインか」を考えている。その中で、2021年のロボコンには本格的なニューノーマルシフトを感じる。2020年大会の開催見送り時に「開催している場合ではない、開発している場合ではない」という状況だったのを考えると本当に変化が速い。
今回、力が出しきれなかった中には、対面に回帰せずに勇気を持ってオンライン開発に取り組んだチームもあったはずだ。対面でも「ちゃんと動くロボット」を完成させるのは難しい。その中で、さらに開発のリモート化に挑んだ経験は、エンジニア人生の大きなアドバンテージになるだろう。
世界中のエンジニアが、どうか来年も、それ以降も無事にロボットを開発できているようにと願ってやまない。大会に出場できなかったチームも含めた、全ロボコニストの努力に敬意を表して本稿を締める。本当にお疲れ様でした!