2017年8月26日~27日、ABUロボコンが日本・東京都大田区・大田区総合体育館にて開催される。
東京大会は2009年以来だ。前回開催では中国と香港が優勝・準優勝を飾ったが、今年はどう出るだろうか? 我々デバプラ編集部チームは先日お届けした日本代表選考会に引き続き、過去最大規模のスタッフ動員で、このABUロボコンの状況をお届けしていく。

会場は大田区総合体育館
京急蒲田駅から徒歩10分。2016年のヒット映画「シン・ゴジラ」でゴジラが遡上した川を超えた先に、国際大会の会場がある。
東京の気温は34℃。気温も高いが湿度も高い。うだるような暑さのため野外にいる関係者は少ない。そのため会場周辺は一見落ち着いて見えたが、会場内に入ったとたん、空調の効いた室内には、別の種類の熱気と、いつもとは違う匂いがうずまいていた。
海外チームは金曜日のうちに現地入りしている。チームによっては日本観光を楽しんだり、技術見学をする予定でいるようだ。せっかくの訪日なので満喫してほしい。
本大会の見どころ&テストラン速報!
今年は18カ国19チームが参戦する。注目は2016年優勝校のマレーシア(マレーシア工科大学)、同じく2016年準優勝校の中国(東北大学)、2012・2013年準優勝、2014年優勝校のベトナム(ラクホン大学)。そして何より、日本の東京工業大学・東京大学だ。
東京工業大学(日本)
言うまでもなく、6月に行われた国内大会(ABU・アジア学生ロボコン代表選考会)の優勝校。打ち出し用のバット「かまいたち」の形状がかなり変わっている。それ以外は大規模な改造は行わず、調整と合わせ込みに徹したようだ。
国内大会の時よりも足が速く、打ち出し間隔も速い。ディスクの分散も小さくなったのではないか。テストランでは、向かって右端のスポットになかなか乗らず、1分53秒でようやくAPPAREを達成。苦手なスポットがあるのかと危惧していたが、その後のテストフィールドで連射APPAREを決めていた。
チームインタビューによれば「5分のテストランで合わせ込みを終わらせるのは、正直キツい!」とのことだった。
テストラン2回目では、まさかのマシントラブル!? テストフィールドでのキビキビした挙動が嘘のように動けない……! 不安の残るテストランになった。
東京大学(日本)

ABU仕様、最大のアップデートは発射台の軸追加。チルト動作が可能になっている。細かな角度調整によって、精度とAPPARE達成タイムが向上しているとのことだ。
国内大会で目立っていた「足の速さ」は、最高速をセーブしたように思える。日本大会で注目を集めたサブマシン(ディスクの検品装置)は使わないようだ(あれ好きだったのになあ……)。
やはり組織力が高く、テストランもトップバッターでの参加。一回目のテストランで、すでに実戦のよう。順調に射出を続ける。が、まだ調整中という印象。きっちり乗せてくる、という状態ではない。右の装填機構にジャムがある。新品のディスクで出ている個体差はもちろん、何度か射出したディスクでも変形が起きるため、装填の調整が大変そうだ。
キネクトを使った動作制御がフィールドでうまくはたらいていない。各種光学フィルタの追加などの対策が行われている。17:00時点、リーダー豊島さんによれば、「きついっす」とのこと……。
マレーシア工科大学(マレーシア)

昨年の優勝校が今年作ったマシンは、扇形のローラー射出機構が2機。日本大会での仙台高専名取のマシンに少し似ている。
無骨で質実剛健な印象を受けるマシン。形状から「ふわり」と打つイメージを持っていたが、射出モーションは予想外に鋭かった。軌道もキレイで、スポットにもよく乗っている。テストラン2回目でAPPARE達成!(1分20秒)
ピットでよく見てみたところ、マシンパーツは3Dプリンタで作られたものが目立っていた。2つの砲台で別々の角度をつけてスポットを狙う仕組みで、APPAREの最速記録は40秒以下とのこと。マシン開発費用は30万円くらいだそうで……、やりくり上手。頑張ってほしい。
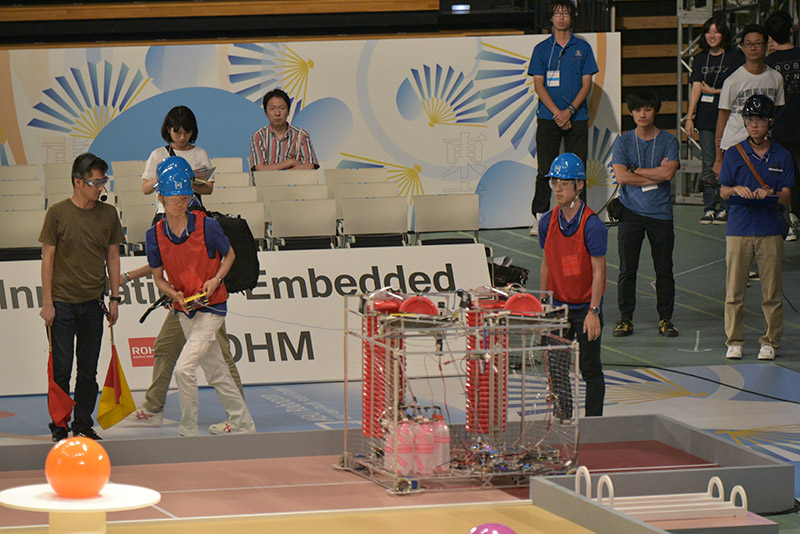
東北大学(中国)

一転、一目で分かるお金のかけ方。とにかく豪華! CFRP削り出しのギアや、マガジン回転式の自動装填ギミックにワクワクする。マシン開発費用はおよそ10万元(160万円)とのこと。ただしこの値段は複数の情報が錯綜している。
東大マシンに似たローアングルからのベルト射出機構が2つと、トップにカメラを備えた上部打ち出し機構が1つ。上部の打ち出し機構は、カメラ検知による妨害機能がついている。自軍のスポット(対戦相手にとっては5ポイントスポット)にディスクが乗せられたら自動で打ち落とすとのこと(!)。エアボトルも多く、とにかく「マッチョ」な印象のマシンだ。
パイロットはタブレット端末にインストールしたアプリで射出機構をコントロールする。スタートから装填、射出スポットまでの移動はすべて自動で行われるため、パイロットはスポットを狙うことに集中できるとのこと。
打ち落とし機構の鋭い射出が目を引く。連射が効くので1分足らずで50枚すべてを打ち尽くしてしまう。射出位置が低く、位置合わせが難しそうに見えるが、どうか……?
ラクホン大学(ベトナム)
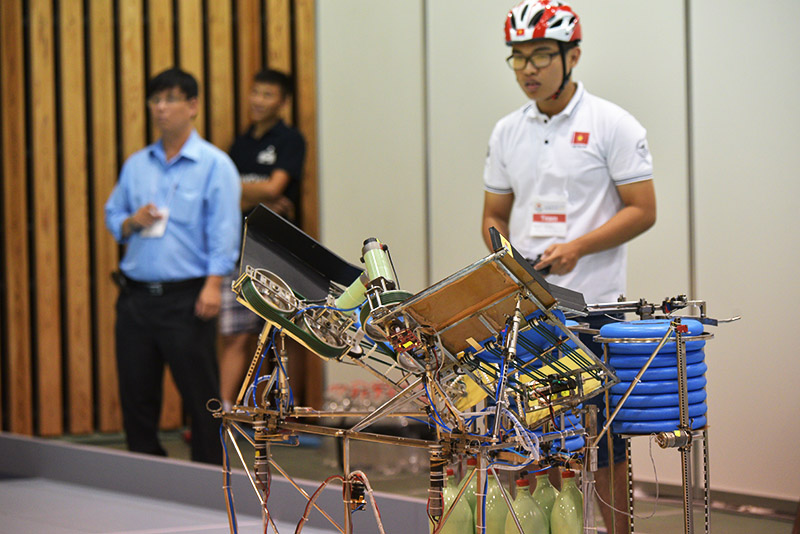
東大のマシンに少し似ている。エアシリンダで押し出し、ゴムをたばねたベルトで打ち出しする仕組み。
ディスクを装填したマガジンを、ランドセルを背負うように自動で一発装着する仕組み。中国同様、ディスク装填を自動化することで射出モーションに入るまでの時間が短くしている。手動装填のチームと比べて、5秒~10秒程度はアドバンテージがあるだろう。
足も速いし打ち出しも速い。中国同様、1分程度ですべて打ち尽くしてしまいそうだが、テストランで7つのスポットすべてにディスクを乗せていた。派手さはないが、仕事が丁寧で、技能レベルの高さを感じる。けしてコストがかかっているようには見えないが、その戦闘力は高い。
その他、編集部が気になったチーム
注目の強豪校のほかにも、いくつか目立っていたチームを紹介したい。
タートゥーム社会教育産業カレッジ(タイ)
国内大会での京都工藝繊維大学を彷彿とさせるフォルム。挙動も似ている。連射は速くはないが安定感があり、とても精度が高い! テストラン2回目、1分38秒でAPPARE達成。優勝経験のないチームだが、手強そうだ。
香港科技大学(香港)
香港チームの特徴は足回りだ。横向きのタイヤで、フィールドの壁をクランプして走る。走行エリアの壁をガイドに使うマシンは多いが、ガイドではなく「壁で走る」マシンは本大会唯一だろう。接地面は小型のタイヤのみ。ほぼフルカーボンボディ、大柄、黒、そしてその作動音。いかつい。
南太平洋大学(フィジー)
アルミフレーム、アクリル板のシンプルボディ。伝統的な紋様「タパ」をあしらったマシンカバーでお国柄が出ていて、とても癒やされる。
トリブバン大学(ネパール)
シンプルながら丁寧に作られている。三点支持のボールネジで角度制御するようだ(本当にシンプル!)。テストラン1回目で思うように動けなかったため動作制御を自動から手動に変え、マニュアルでの得点獲得を目指す。
明日はどっちだ? テストラン終了、いよいよ本戦へ
テストラン2回目では東工大・東大ともに思うような動きができなかった。

国内大会では予選7位・8位というギリギリの結果から優勝・準優勝を勝ち取ったチーム。調整力は確かだが、それでも不穏な展開のように感じてしまう。どうなる日本勢……!?
また、各チームのマシン傾向としては、ベルト射出が多いように思う。続いてローラー射出。バット打ち出しは東工大、インド、香港エジプトの4校のようだ。かさね投げマシンが無いのは残念だ。国内大会で準決勝敗退となった東京農工大学の、「だんごパンチからのかさね投げ」の勇姿を見てみたかった!
少なからぬチームが、ピット内で加工作業を行っていたため、急遽ピットルームに共用の作業場が仮設された。グラインダや半田付け、ドリルによる肉抜きなどなど、機械的な加工による合わせ込みは、国内大会では見なかった光景だ。
18:10、テストラン2回目の後、シード校が発表された。
- アカプリンド科学技術大学(インドネシア)
- 東京工業大学(日本)
- マレーシア工科大学(マレーシア)
- タートゥーム社会教育産業カレッジ(タイ)
- ラクホン大学(ベトナム)
東北大学(中国)と東京大学(日本)はシードならず。
そして予選組み合わせは、速報ページでお知らせした通りだ。
NHKでライブストリーミングが行われるぞ!
開演は8月27日11時から。同時刻より、NHKでライブストリーミングが配信される。リアルタイムで12カ国語同時放送とのことだ。国内大会で稼働した「多視点ロボットカメラシステム」ももちろん導入されている。主催も気合いが入っている。我らデバプラ取材班も、負けじと明日も引き続きリアルタイム更新で試合模様をお届けする!