デバプラ編集部の濱谷です!。
今回はロボットコンテストの雑誌として著名な「ロボコンマガジン」さんとコラボレーションすることになりました。
誌面に書ききれないロボコンマガジン編集部さんの取材記事をぜひお楽しみください!
ロボコンマガジンは、ロボット総合情報誌である。さまざまなロボコンをリポートすることで定評があるものの、紙媒体であることからおのずと限界もある。
今回、幸いにも、デバプラ「Event Plus」のスペースを借りる機会が得られた。そこで、誌面では語りきれなかった情報を伝えることにした。
2014年末に行われたばかりの『第26回 全日本ロボット相撲大会』からの情報を交えながら、相撲ロボットのテクノロジーを解説する。鉄の土俵で戦う「ロボット相撲」だ。
2014年12月14日に両国国技館で開催された「第26回 全日本ロボット相撲 全国大会」の様子
富士ソフトの主催する全日本ロボット相撲大会は、 相撲ロボットの日本一および世界一を決める公式大会だ。毎年、約1,000体が参加し、全国9つの地区大会を勝ち上がった64体だけが、両国国技館で開催される全国大会の土俵を踏む。最高位である横綱の称号は、そこで優勝した相撲ロボットに与えられる栄誉である。
ロボコンマガジン2015年3月号(2月15日発売)では、2014年末に両国国技館で開催された「第26回 全日本ロボット相撲 全国大会」の様子が紹介されている。この記事と合わせて、最寄りの大型書店などで入手して読んでもらいたい。
土俵周りの白線が、相撲ロボットにとっての勝負俵だ!
ロボット相撲の土俵は、直径154cmの鉄の円板だ。勝負俵の代わりに、5cm幅の白線が描かれる。その外側に落ちたら負けとなる。
ロボット相撲の決まり手は、それしかない。つまり、対戦相手に押し出されるか、勢い余って自分で落ちてしまうか、このいずれかで一本を取られる。3本勝負なので、2本取られたところで負けとなる。
負けないために、相撲ロボットには白線を検知するためのセンサーが搭載される。通常は四隅に1つずつ、計4個の白線センサーが備えられる。
前部の白線センサーは、勢い余って自ら土俵の外へと落ちないためのものだ。土俵を丸く使いながら、対戦相手の側面や背面を取りに行くときにも必要となる。
後部の白線センサーは、対戦相手と距離を取るときなどに使われる。単純に下がってしまうと、そのまま押し出されてしまう恐れがあるので、回りこむように体勢を変えていく。後部左右のどちらかの白線センサーに反応があれば、土俵際ということなので、回りこむ方向を変えなければならない。
この白線センサーに用いられているのは、赤外線だ。土俵面に放射して、その反射の度合を受光素子で測定する。白線は黒面よりも光を反射するので、より強く赤外線が跳ね返ってきたところが白線であると判定できる。赤外線が使われるのは、照明などの別の光源の影響を受けにくいからである。 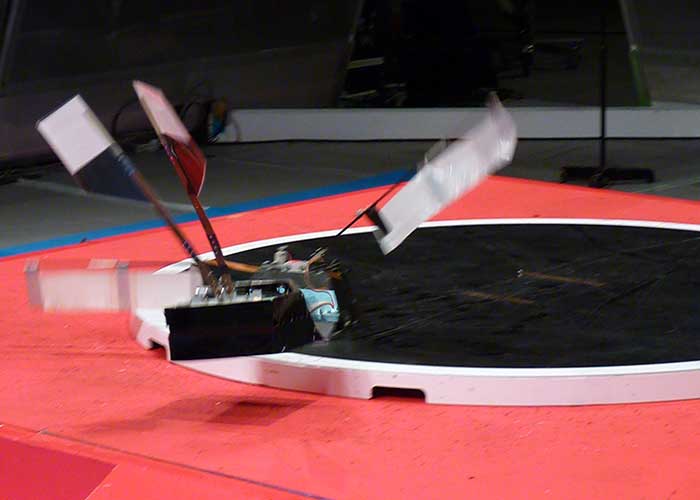
※静止画コマ送り
相撲ロボットは、赤外線で対戦相手を捉える!
大会会場の照明などの影響を受けにくい赤外線は、対戦相手のロボットを捉える対物センサーとしても使われる。
対物センサーは、すなわち相撲ロボットの「目」である。直線的に赤外線が放射され、その反射光から対戦相手の存在を検知する仕組みなので、視野は狭い。複数個搭載するのは、より広い視野を確保するためである。
反射光の戻ってくる時間を測れば、対戦相手との距離も計ることができる。その距離に応じて動き方を変える相撲ロボットは少なくない。
ちなみに、第22回大会から自立型を連覇した、木嶋泰道氏の「六次元K」は、複数の対物センサーの情報から、対戦相手の移動方向も検知していた。それに応じた戦い方を行っていたのである。
すでに述べたように、対物センサーの視野は狭い。そのため、おのずと死角も多くなるので、そこから攻めるのが高機動タイプの相撲ロボットにとっての基本戦術となる。
ただし、これは、あくまでも自立型同士の対戦での話だ。 自立型を転用したラジコン型、いわゆる「ラ自立」は、純粋なラジコン型を相手にするとき、死角を突くような戦法は採らない。ラジコン型を操縦する人の視野は広く、土俵上には死角がないからだ。そこで、死角を突くのではなく、人間が反応しきれないような角度から攻める方法を採る。2014年末の「第26回 全日本ロボット相撲大会」では、練習不足もあったラジコン型「あぽたん」(チームうどん)が、ラ自立の「毘沙門零」(未来ロボット工学研究部)に、この方法で敗れた。

前後の区別のない「TMR‐TE」 は、前後に1つずつ、左右に二つずつの対物センサーを装備している。
前進あるのみの「酒豪旅心」(左)は、対物センサーは前方に3つしか装備していない。
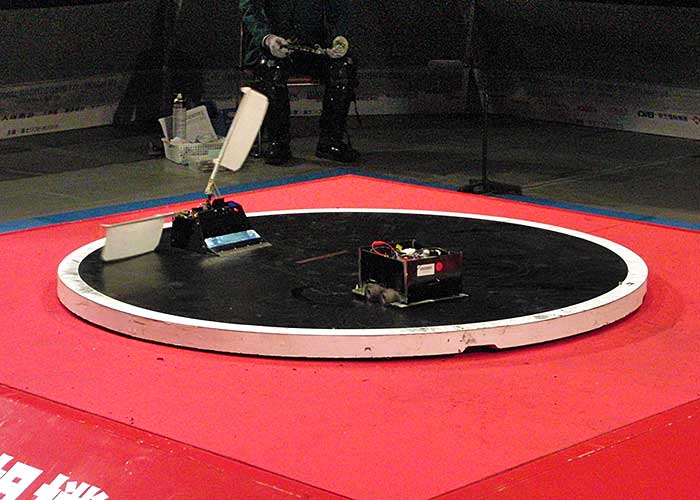
旗持ちの相撲ロボットの目的は、対物センサーのかく乱だ!
対物センサーは、その種類によっては素材まで識別できるが、実際には容易でない。それが白い旗であっても、対戦相手がそこにいると誤認識してしまう。
それを狙って、一部の相撲ロボットは、白い旗を左右もしくは片側だけに吊り下げる。闘牛士が赤いマントで牛を誘導するように、対戦相手を旗側に誘導しながら、スキのできた対戦相手の側面を突く戦法だ。うまくハマれば、簡単に対戦相手を土俵の外へと弾き飛ばすことができる。
もちろん、このハメ手は避ける方法もある。旗込みで対戦相手を認識する方法だ。左右に旗があるなら、その中央が本体ということになる。右旗のみの相撲ロボットなら、向かって右側が本体なので、そちらを攻撃すればいい。
難しいのは、左右に旗を降ろせるのに、どちらか一方にしか旗を降ろさないような対戦相手の場合だ。
ロボット相撲では、仕切りのときには、20cm四方のサイズに収まる形でなくはならない。高さは自由なので、旗は立てた状態で仕切る。試合開始と同時にその旗を展開するので、左右どちらかしか旗を降ろさないという方法が採れるのだ。対策としては、対戦相手のこれまでの戦いぶりの分析や、経験から導き出される勘くらいしかない。
さて、旗は対物センサーのかく乱が目的だが、対物センサーの認識率を下げてしまう「ステルス性」の向上も対極にある。よく見られる黒い塗装や鏡面の相撲ロボットは少なからずそれを狙ったものだが、それ以上の方法も登場しつつあるようだ。
※静止画コマ送り


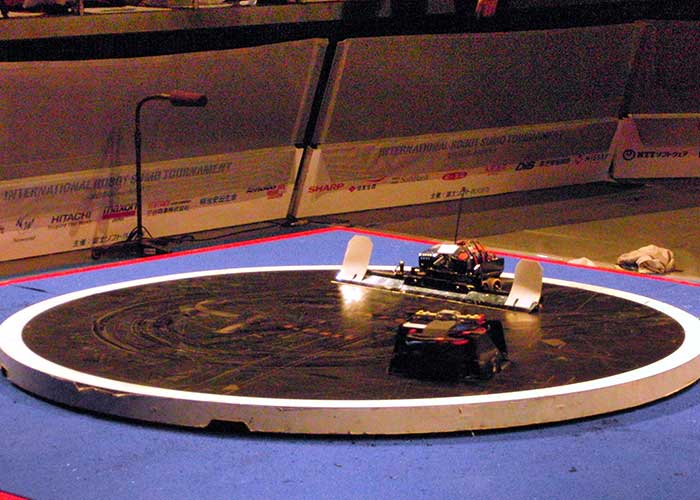
対戦相手に応じて、両旗や片旗に換装する場合もある。
戦術に応じて、両旗とも下ろしたり、片旗だけ上げたりする「六次元K」(左)。
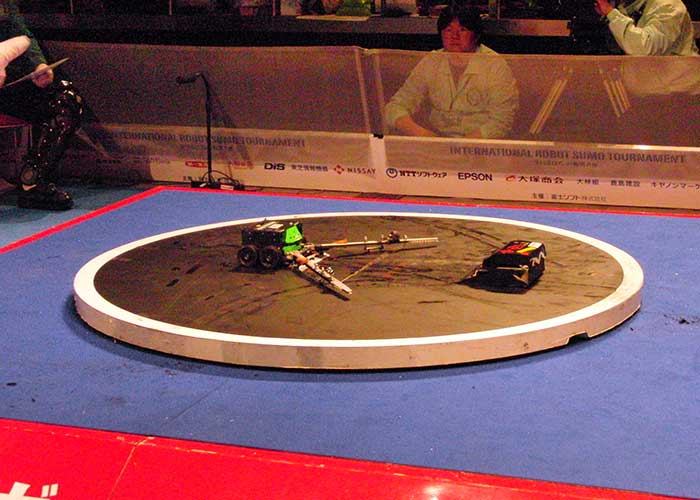
押し出すために、対戦相手の体勢をブレードですくってくずす!
多くの相撲ロボットの前面に見られる鋭い刃先は、「ブレード」と呼ばれる武器である。ロボット相撲の始まった当初から同様のものはあり、近年では怪我に結びつきかねないほどの鋭いブレードも少なくない。それに対する安全対策として、自立型は遠隔操作のリモコンでの起動と停止が行われるようになった。 ブレードの目的は、対戦相手をすくい上げることだ。すくわれた対戦相手は体が浮き上がるので、推進力が失われる。そこを一気に押し出すのだ。 もっとも、ブレードは、ほとんどの相撲ロボットが備える、いわば標準装備である。決定的な優劣はなく、正面からでは運任せに近い勝負となる。ブレードのない側面や背面をとれれば申し分ないが、簡単にとらせてくれるはずもない。 そこで狙い目となるのは、ブレードの端である。ブレード両端の角は、比較的にブレードを滑り込ませやすい。いったん滑りこませてしまえば、対戦相手をすくい上げて押し出せる。 そのためには、引くという戦法も有効となる。 突進する相撲ロボットのブレードは浮きやすく、下がる側のブレードは沈んだ状態でそれを迎えられる。仕掛けるタイミングは難しいが、対戦相手をすくい上げられる確率は高くなる。自立型ならプログラムミングの、ラジコン型なら操縦の、テクニックの見せ所である。 引くという戦法を実現しやすくするには、アームを装備するのも有効だ。ブレードの付いたアームを左右に展開すれば、ブレードが長くなる分だけ、旋回運動で対戦相手のブレードの端を捉えやすくなる。 アーム装備の欠点は、機動力が失われることだ。また、アームを展開し終える前に側面へと回り込まれると、なすすべがなくなる。常に対戦相手を正面に捉えられるだけの旋回能力と、自立型なら「目の良さ」が必要となる。

※静止画コマ送り
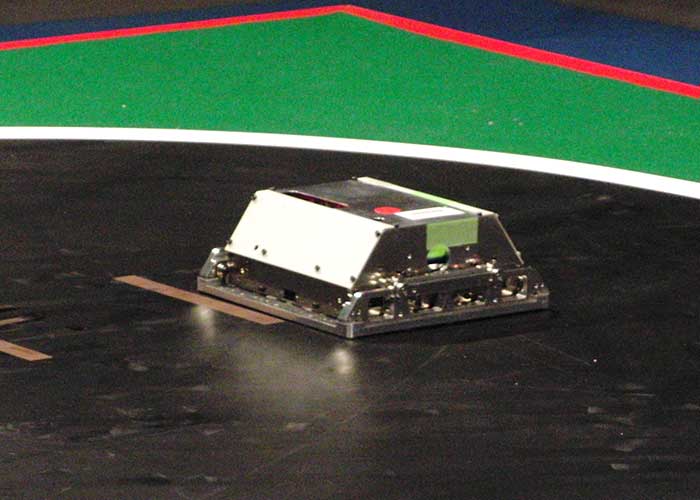
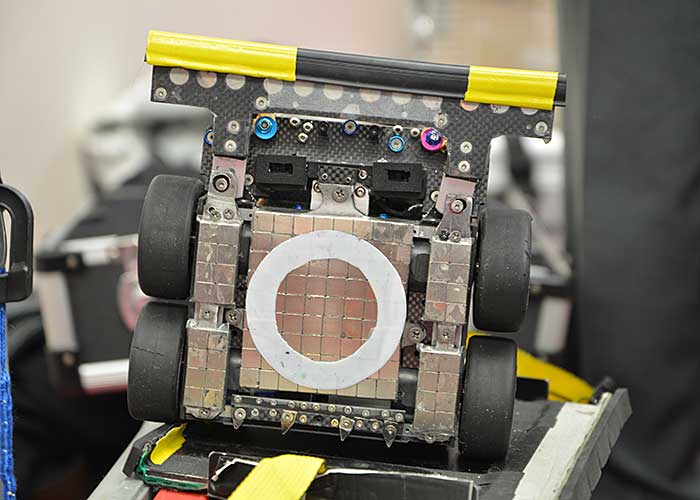
土俵上の相撲ロボットの重量は、底面の磁石の効果で数百キロにもなる!
ブレードですくい上げられにくくするには、土俵に吸着する方法が有効だ。高機動タイプでも、土俵に吸着しながら走れば、ブレードが大きく浮くことは防げる。
ロボット相撲では鉄製の土俵が使われるので、吸着には磁石が用いられる。その多少の違いはあるが、これも現在の相撲ロボットの標準装備だ。
磁石の中でも強力とされるのが「ネオジム」だが、配置などに工夫すれば、それにこだわらなくても吸着力の強い相撲ロボットになる。たとえば、2014年末の「第26回 全日本ロボット相撲大会」で3連覇を達成した、田村成世氏の自立型「年金生活3号」は、地元の量販店で購入した磁石を使っていると言う。それでいて押し負けないのだから、工夫のしがいがあるというものだ。
磁石で鉄の土俵に吸着する相撲ロボットは、本来の重量が3kg以下であるにもかかわらず、数百キロにまで増加する。試合後、土俵から相撲ロボットを取り上げる様子に注目すると、そのような吸着効果がよくわかる。土俵から相撲ロボットをはがす際には苦労しているが、いったん持ち上げてしまえば片手でも運べるのだ。
理論上は1トン近くの吸着力まで高められると言うが、試合後の土俵からの引きはがしを考えると、現実にはそんな相撲ロボットは登場しないかもしれない。
もちろん、高機動タイプの相撲ロボットの場合には、磁石は少なめに配置される。吸着力が強ければ強いほど、推進力の大半が自身の移動に費やされてしまい、高速で動けなくなるからである。


モーターを制御するためのモータードライバは、相撲ロボットでは自作するのが普通!
相撲ロボットのパワーとスピードは、モーターの性能によるところが大きい。その点で定評のあるマクソン製モーターが、相撲ロボットでも主流だ。
もちろん、他のモーターでも強い相撲ロボットを作ることはできる。しかし、第22回大会での初優勝の直前までタミヤ製モーターを使っていた、木嶋泰道氏の「六次元K」のベストが それまで3位であったことを考えると、マクソン製モーターが勝利に貢献することは否めない。各種のロボコンでもマクソン製モーターが定番となっていることは、その性能の裏付けとも言える。
ただし、モーターはともかく、それを制御するモータードライバは、市販のものでは不十分だ。
相撲ロボットでは戦略が重要となる。オーバーテクノロジーの相撲ロボットでも完成すれば話は別だが、そうでないなら長所を活かし、短所はカバーしなければならない。長所はすなわち戦略のかなめとなる部分で、短所はその結果として生まれる弱点である。モータードライバは、それに応じて設計する必要があり、市販のものでは 間に合わないことが多い。実際、相撲ロボットでは、モータードライバは自作するのが普通だ。
※ロボット相撲の設計については、「ロボット相撲設計技法〜運動解析からはじめるロボット設計のススメ〜」が資料ダウンロードからダウンロードできる!
※静止画コマ送り
真正面からでも押し出せるだけの力勝負の「年金生活1号」
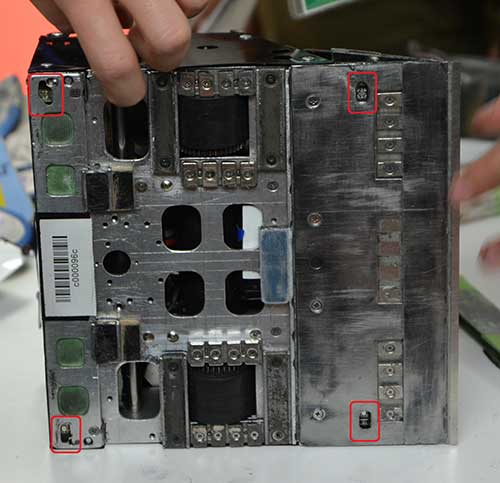
闘志は燃やしても、ロボットは燃やさない!
相撲ロボットは、20cm四方に収まるサイズで作られる。高さは自由だが、重心は低いほうがロボット相撲では有利に働くので、試合開始前の旗やアームの収納場所として利用されるのが普通だ。
ロボット相撲は、激しいぶつかり合いになるので、配線はすべて相撲ロボットの内部に収納される。プログラムの切り替えなどに使うスイッチは、上部の操作しやすい場所に配置されるものの、試合にはフタをして臨む。
そのような密閉空間に、すべての部品が収納されるので、電子部品の動作環境としては好ましくない。熱を持ちやすく、破損の要因となることもある。机上で回路を組み立てても、実験してみなくては正しく動作するかわからないのである。規定内の電流しか流していなくても、密閉空間では、たとえるなら「低温やけど」のような状態になる恐れがあるのだ。
多くの相撲ロボットに用いられているリチウムポリマーバッテリーにしても、通常の使い方ならそうそう発火するものではないが、そのような劣悪環境では危険性が高まる。そのため、相撲ロボットでは、ヒューズやポリスイッチなどの安全対策が義務付けられている。1年以上使い続けないことも、安全対策の一つだ。
第22回大会から自立型を連覇した、木嶋泰道氏の「六次元K」の場合は、発火しづらいリチウムフェライトバッテリーを使用するとともに、過電流検出回路を備えていた。非接触型直流電流センサーを利用したもので、想定外の電流が0.5秒以上続いたときに、それを遮断する。
同時に、「六次元K」の過電流検出回路は、対戦相手との押し合い状態になったときの有利不利の判定にも用いられていた。不利と判断したときには、回りこんだり、ブレーキで踏みとどまったりするようになっていたのだ。モーターにブレーキをかけていれば、そうそう押し切られるものではない。土俵上でこうちゃく状態が続けば、審判の判断で仕切り直しが行われるので、それを待って再起を期す作戦だ。
ロボコンマガジン2015年3月号(2月15日発売)にも「第26回 全日本ロボット相撲 全国大会」の様子が紹介されているので、あわせて読んでもらいたい。
●第26回 全日本ロボット相撲 全国大会
2014年12月14日(日曜日)両国国技館
http://www.fsi.co.jp/sumo/