はじめに
前回の記事では身近にあるものを使って、低予算で小型ドローンを簡単に作る方法をご紹介しました。
このパート②ではより安定して飛行できるように、Arduino Nanoをドローンに組み込んでみましょう。操作用のコントローラーを使って飛ぶようにプログラムすることもできますが、パート③ではGPS機能を使って、操縦者を自動で追尾させてみます。
前回に引き続きドローンを飛ばす際の注意事項ですが、まず200g以上のドローンを飛ばす場合、許可申請が必要になります。また自作ドローンや改造を施したドローンは、改造概要や写真と共に情報を追記して申請を行う必要があります。詳しいルールについてはこちらのページからご確認ください。
ただ、申請してあるからといってどこでもドローンを飛ばしていいというわけではありません。他人の所有地で飛行させる場合は必ず許可を取るようにしましょう。また、見落としがちなのが「電波法」です。今回はドローンのコントロールに必要な現在地の情報を、Bluetoothを使ってドローンに送信します。Bluetoothや国内のドローン操作に使われている2.4GHz以外の電波帯を使用する場合は免許や許可が必要になるので注意しましょう。詳しくは、こちらのページからご確認ください。
最後に、ドローン事故の恐ろしさは本体の落下による衝撃だけではありません。高速で回転するプロペラも人や物に被害を与える可能性があるので、ドローンを飛ばす際はひらけた場所で周りに注意して飛ばしましょう。安全第一です!
それではまず、今回使用する備品から見ていきましょう。
Arduinoドローンの自作に必要な備品
1. Arduino Nano:ドローンの心臓部です。動きを制御し、他の回路を統合します。
2. ミニドローン一式として次のものを用意します:
a. 小型モータ×4:電子部品の専門店で売っています。回転数400~500KVのものを探してください。

b. モータジャケット×4:モーターの固定に使用します。
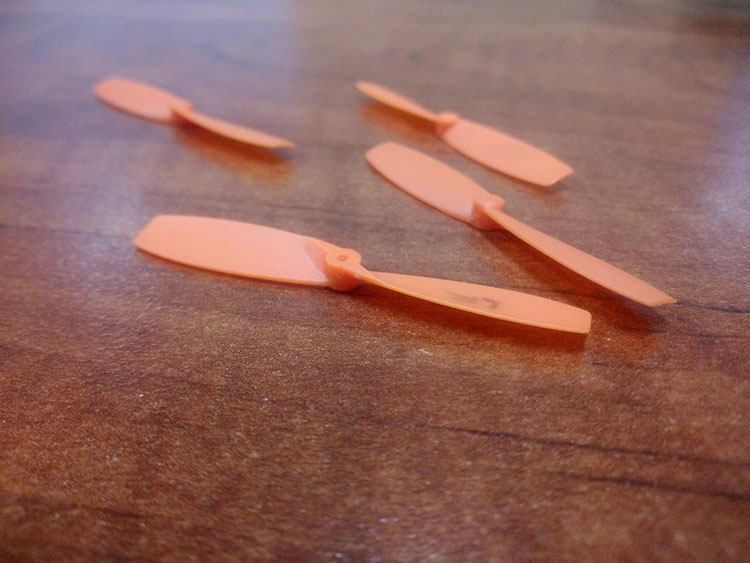
c. プロペラ×4:回転直径10cmがおすすめです。購入時には、モーター軸にぴったり合うことを確かめてください。
d. リチウムポリマー(リポ)バッテリー:300~500mAh 25Cの3.7Vバッテリーが1つあれば、10~15分の飛行時間に十分です。

e. バッテリー充電器:3.7Vバッテリー充電器です。バッテリーと一緒に購入できるはずです。
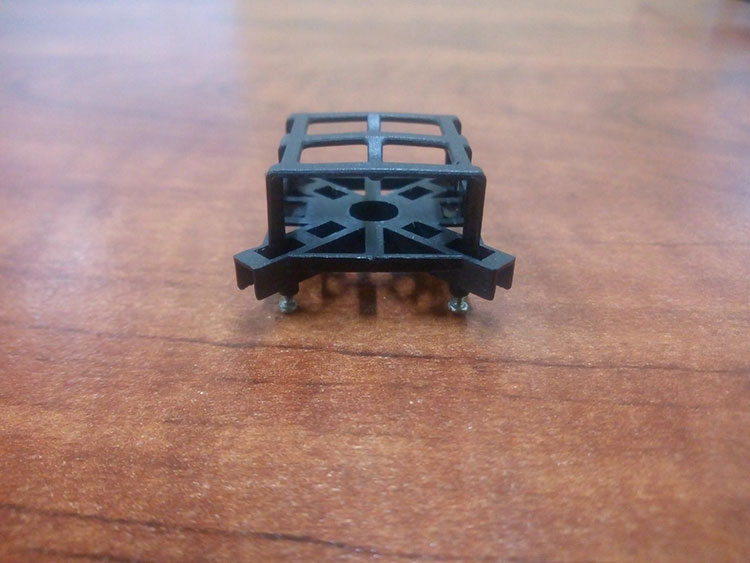
f. フレーム:自作ドローン用のものを購入するのが楽ですが、自作してもかまいません。今回はたまたま手元にあったおもちゃのドローンのフレームを使用しているので、その組立工程も紹介しておきます。
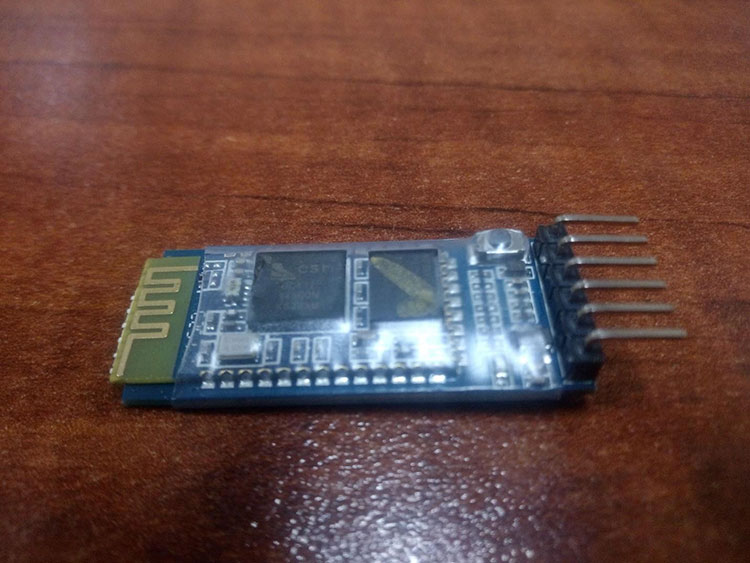
3. Bluetoothモジュール:HC-05/HC-06 Bluetoothモジュールを使います。オンラインショップなら1,000円くらいで売っています。
※編集者注記:筆者が海外在住のため、技適マークのついていない製品を記事内で使用しておりますが、日本国内で無線を利用する製品を使用する場合は、必ず技適マークがついていることを確認してください。尚、商品へのリンクは技適マークがついているものに差し替えさせていただきました。不適切な商品が掲載されていたことをお詫び申し上げます。
4. NEO-6M-001 GPSモジュール:ドローンの現在の座標を取得する部分です。こちらも1,000円くらいで購入できます。

5. ハンダごてとハンダ:配線基板に部品をハンダ付けします。

6. トランジスタ:2N2222 NPNバイポーラトランジスタ×3。

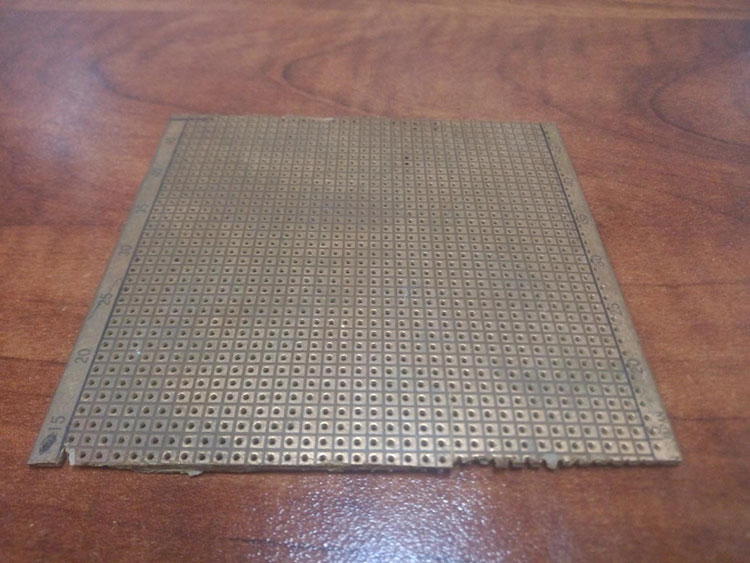
7. 配線基板/PCB:回路を組み立てるベースです。
8. カッター:配線基板の切断に使用します。
9. グルーガン/テープ:基板の固定に使用します。
ステップ1:ドローンを組み立てる
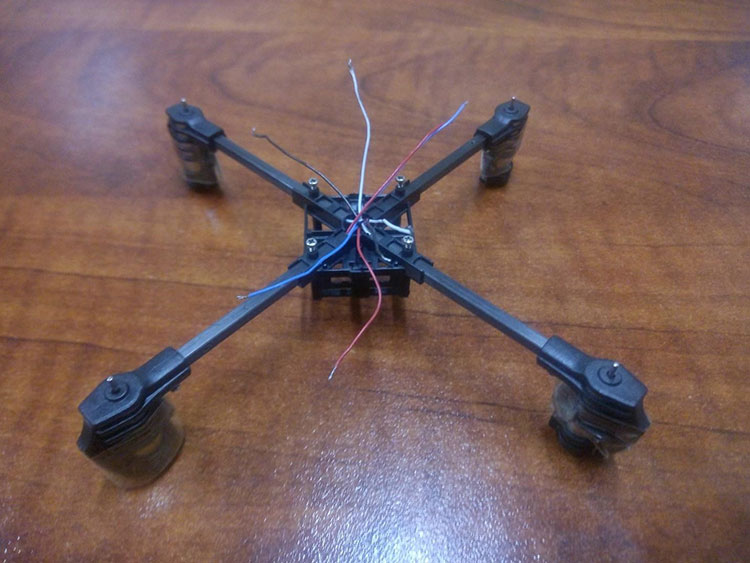
最初に、ミニドローンを組み立てます。小さい開口部からワイヤーが外に伸びるようにして、モーターをジャケットに取り付けます。

次に、写真のようにアームにワイヤーを挿入します。使っているフレームによってはワイヤーがむき出しになりますが、その場合は後からテープなどでフレームに固定するようにしましょう。


アームの反対側を、中央のアセンブリーフレームに取り付け、アームのネジを締めます。
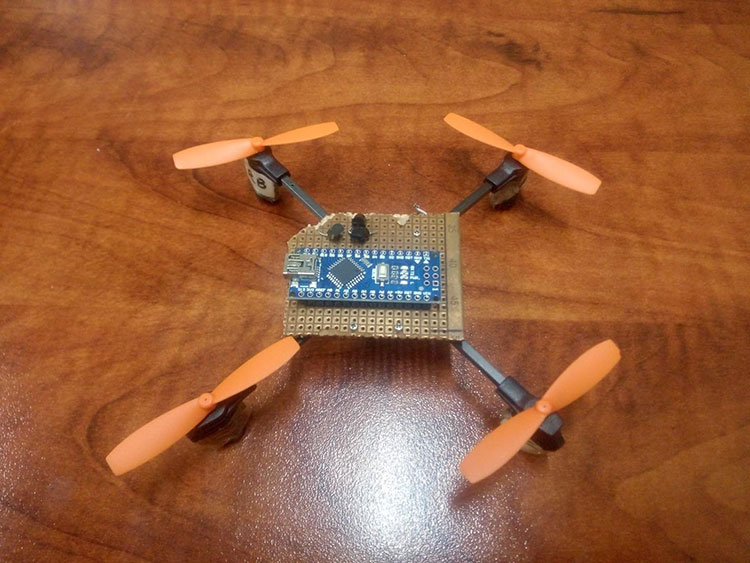
モーターにプロペラを取り付けます。

ステップ2:Arduinoにモーターを接続する
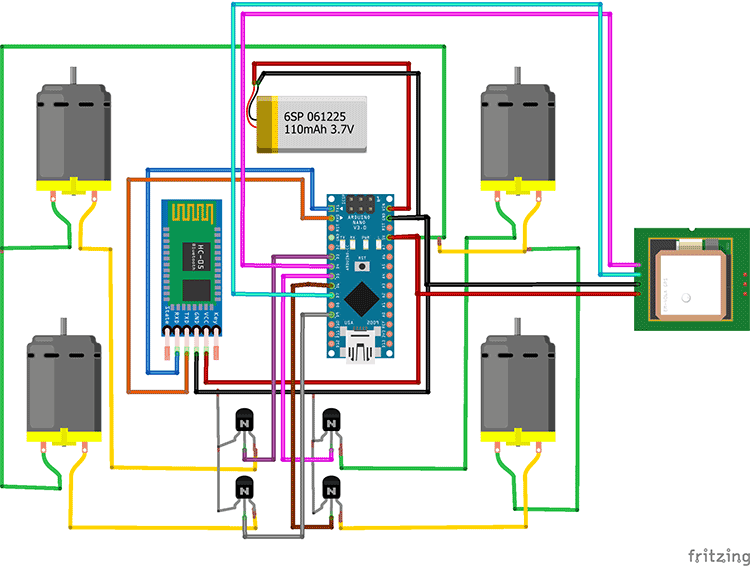
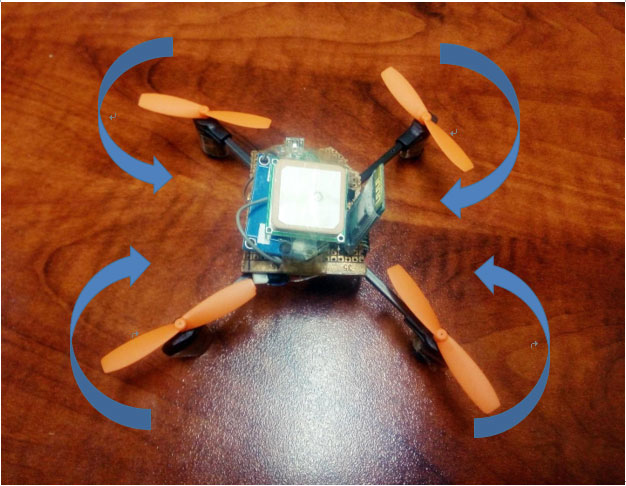
まず、Arduino Nanoにモーターを接続します。以下の配線図のように配線してください。モーターの極性には十分注意してください。間違えるとドローンは飛びません。同じアームの両端にあるモーターどうしが同じ方向に回転します(プロペラの回転を示した写真を参照)。また、モーターに定格電流を送るために、トランジスタが必要です。Arduino Nanoだけでは、モーターに必要な電流を供給できません。部品の足を配線基板に差し込み、ハンダ付けします。配線は、次のとおりです。
➢ モーターRF(右前方)
● ワイヤー1(モーター側)->トランジスタ1のコレクタ(ピン1)
● ワイヤー2(モーター側)-> +5V
● トランジスタ1のベース(ピン2)->ピン6(Arduino側)
➢ モーターLF(左前方)
● ワイヤー1(モーター側)->トランジスタ2のコレクタ(ピン1)
● ワイヤー2(モーター側)-> +5V
● トランジスタ2のベース(ピン2)->ピン8(Arduino側)
➢ モーターLB(左後方)
● ワイヤー1(モーター側)->トランジスタ3のコレクタ(ピン1)
● ワイヤー2(モーター側)-> +5V
● トランジスタ3のベース(ピン2)->ピン9(Arduino側)
➢ モーターRB(右後方)
● ワイヤー1(モーター側)->トランジスタ4のコレクタ(ピン1)
● ワイヤー2(モーター側)-> +5V
● トランジスタ4のベース(ピン2)->ピン12(Arduino側)
モーターが意図した方向に回転しない場合は、ピンを入れ替えてください。
また、GPSモジュールとArduinoの間は、必ずなんらかの絶縁を施してください。そうしないと、2つの基板の回路がショートを起こし、どちらの基板も損傷します。
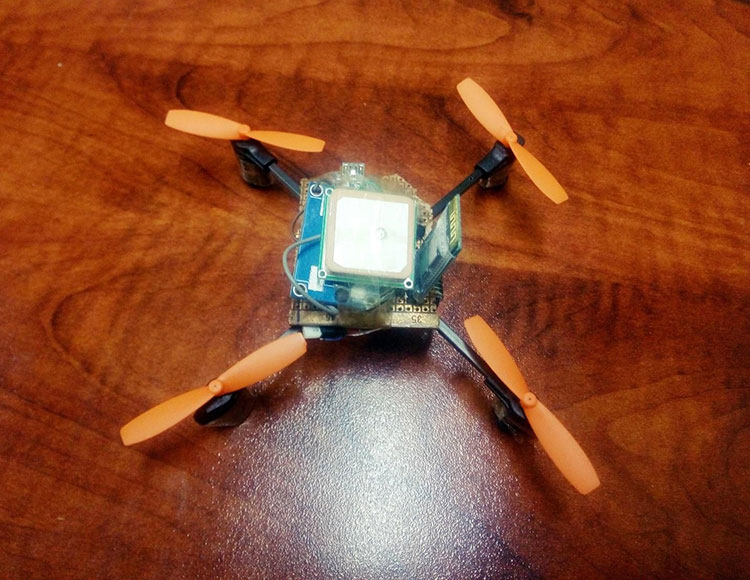
これで、Arduinoを搭載したフル機能のミニドローンの完成です!あとはArduinoをフライトコントローラーとして使って操縦し飛ばすこともできますが、パート③では既に取付けてあるGPSモジュールを使って、操縦者を自動で追尾しながら飛行するようにしてみましょう。
今回の連載の流れ
第1回:身近にあるもので低予算ドローンを作ってみよう
第2回:Arduino Nanoをフライトコントローラーとしてのせる(今回)
第3回:ArduinoとGPS機能で自動追尾させてみよう