決勝直前! ロボマスター2018 @深セン現地レポート
【速報】ロボマスター2018深セン現地レポ・FUKUOKA NIWAKA参戦記
【速報】ロボマスター2018 決勝現地レポ〜ハイレベルなストラテジーを堪能せよ
ロボマスター急成長の理由〜日本のロボコニスト視点で分析
深セン華強北(ファーチャンペイ)で???!!!を探す:ロボマスター2018取材番外編

中国の超ハイレベルなロボットコンペティション「ロボマスター」。
すでにお知らせしている通り、日本から初となる出場を果たしたFUKUOKA NIWAKAは、見事ベスト16という「爪あと」を残した。帰国から約一週間後、そのメンバーに再び集まっていただいた。インタビューのテーマは、ロボマスターの「リアル」な部分。参加者しかわからない、その出来事や思いを率直に語っていただいた。
答えてくれたのは、発起人でありプロジェクトリーダーでもある古賀 聡さん、回路班リーダーの河島 晋さん、設計・機械リーダーの花守 拓樹さん(以下敬称略)。
●ロボマスター関連記事
- 祝・ロボマスター日本初参戦 高専・学生ロボコニストが目指す “世界” FUKUOKA NIWAKA インタビュー Vol.1, Vol.2
- 決勝直前! ロボマスター2018 @深セン現地レポート
- 【速報】ロボマスター2018深セン現地レポ・FUKUOKA NIWAKA参戦記
- 【速報】ロボマスター2018 決勝現地レポ〜ハイレベルなストラテジーを堪能せよ
- ロボマスター急成長の理由〜日本のロボコニスト視点で分析
- ロボマスターとは?大会概要やルール紹介(FUKUOKA NIWAKAサイト)
開発の「青天井」。見えるライバルとの争い
━━ベスト16という結果、おめでとうございます。日本に帰ってきて少し落ち着いたところだと思います。今、どんな気持ちでいるか教えてください。
古賀:今は、早く次をやりたい。そんな気持ちになっています。
花守:僕も古賀さんと同じです。深センにいるときはかなり楽しい思いをさせてもらいました。
━━中国ではモテモテだったという話も……。
花守:モテたかどうかはちょっとわからないですけど、確かに一瞬、中国に帰化しようかと(笑)。まあそれはそれとして、ひさしぶりに、「人生の自己ベスト」じゃないですけど、今までで指折りの思い出だな、と思っていました。そして僕は自己ベストが出たら、すぐに新しく動き出したいタイプなので、古賀さんと同じ。次をやりたい。今回より楽しいやつをぶちかますかとか、仲間を増やすとか、自分ができるところをしたいな、という気分です。
河島:そうですね。1年近くずっとやってきて、めちゃめちゃきつかったけど、本当に楽しい2週間でした。いい思いをさせてもらって、素晴らしい舞台に立たせてもらって、これを次へ繋げたい、他の人にも広めたい、という思いでいます。
━━前回インタビューさせていただいたのが2018年1月で、まだ開発の初期段階でした。その後はどう進めていったのでしょうか。
全員:中国の2週間が10年分ぐらいの濃い経験だったので、すでにはるか昔の出来事のようで……。
花守:この1年を通してずっとなんですが、「奇跡的に全員のスキルが数珠つなぎになった」と感じています。どこか一カ所でも断ち切られたら、今回の結果が成り立っていなかったというぐらいのギリギリ具合。かなり苦しい戦いを続けてきたのかな、と今振り返ってみれば思えます。
河島:本当にギリギリでした。メンバーはたくさんいるし、みなさん素晴らしい技術を持っています。しかし、全員がこのためだけに時間を割けるわけではありません。機械も回路も制御も、バラバラに作ったモノをつなぎ合わせれば動く、というわけでもありません。それで、自分が動くしかないという状況があって、それぞれに孤独な戦いがあったのかな、と思います。
━━特に難しかった課題は。
花守:事前審査を通過した後、でしょうか。そこまでは、移動するとか弾を撃つとか、基本的な動きをそれなりに達成することを目標にしてやってきました。それはいいんです。問題はその後で、目標が「大会で勝つ」ことに変わります。そうなると、言ってみれば青天井の世界です。これが全ロボットに課せられるわけです。
━━先んじている中国国内のチームとの競争になるわけですね。
花守:はい、「どうせぇちゅうねん」と思ったこともありました。課題を自分で設定して、クリアしていくという終わりのないブラッシュアップです。ギリギリの状況でしたから、優先順位をつけて、切り捨てなければいけないものもありました。例えばボーナスパネルを狙う画像認識や自動照準の機能です。大会を経験してわかったのは、そうした僕たちの詰め切れなかった部分を、上位校は実現していることです。
河島:まさにその通りです。自動照準もそうですし、被弾を避けるために、当たり判定があるシャーシ部分を動かしながら相手を撃つ機能もそうです。中国の地区大会の動画を見ていると、そうしたブラッシュアップが非常に良くできているチームが目立つわけです。それを真似して目標に設定したとして、実現できる人がいるのか、時間を費やせるのか。そうした判断が必要です。頑張ってやってきたことを切り捨てるのは辛いことですし、でも限られたリソースの中でどこまで実現できるのかは、いずれ判断しなくてはならない。
━━ロボマスターの開発の特徴は、「ジャッジシステム」だと思います(編注:大会側から供給される、競技及びロボットのOS+デバイスのようなもの)。これがあることにより、開発の難易度は上がるのでしょうか。あるいは、土台があることで、開発がしやすくなるのでしょうか。
河島:それは両方あります。便利なところと、それを使いこなさなければならないというハードルと、両方の意味を持ちます。
便利な点としては、例えば過電流から回路を保護してくれたり、それを使っていれば安心、と思えるところがいろいろあります。射出速度のようなデータが取得できる、センサーなどのシステムの完成度が高いといった点です。
ハードルという意味では、通信プロトコルなどの情報は公開されているんですが、これが中国語でした。今回はチームの母体であるニワカソフト株式会社のワンさんが翻訳してくれたのですが、エンジニアではないので、専門的な部分の解釈が難しかった。
花守:機械の側から言うと、それが制限でもあり解でもある、と言えると思います。例えば攻撃された時に当たり判定を持つ装甲板があります。当然、この周囲は相手の弾が当たりやすい。だとすれば、この周りに繊細な部品を配置するのは避けるべき、となります。これが制限だとすれば、「装甲板の後ろに配置してしまえば、絶対に被弾しない」という解にもなります。
「恐怖心」と「負け」を知る
━━そしていよいよ、深センに入ります。
花守:向こうでマシンと対峙するまでは、あまり現実感がなかった気がします。「ホントに深セン行くの?」みたいな。でも、実際に弾を撃ってくる相手と向かい合った時、「恐怖心」のようなものを感じて、それで目が覚めました。
━━恐怖心……?
花守:それまで、本当の相手と対峙したことがなかったんです。ロボット系のアニメなんかで、主人公が初めてロボットに乗りますよね。で、自分を倒すという意思を持った敵と初めて向き合う、その恐怖。あれを初めて実際のものとして知りました。
河島:本当、それです。事前に一度、深センまで行って練習試合をしたりはしていました。しかし、相手がちゃんと動いていないこともあって、本当の試合というものがどんなものか、知りませんでした。そして本当の試合で、「負け方」を知るんです。
━━負け方……?
河島:はい。勝ち方はなんとなくイメージがわいていました。試合の動画を見ながら、「最初にヒーローにフォーカスして、倒して、哨兵をやっつけて……」というようなことは頭に入っていました。しかし、負けパターンの時にどう動くとか、不利をカバーしていくとか、それは実際に試合をしないとわからないんですよ。
例えばファーストブラッド(編注:各マッチで、一番初めのロボットダウン)を取られたときにどう動くか、ドローンが落ちてファーストブラッドを取られるとどれだけ苦しいのか。実際の試合で初めて負けパターンを知って、その対策はその時初めて思いつくんです。事前に思いつければ良かったのですが、それでもやはり、経験しないとわからないことがたくさんありました。
━━その現場、オペレータールームの中では、どんなコミュニケーションが行われていたのでしょうか。

花守:国際予選のあいだは、勝ちが続きましたし、安定した雰囲気で、学習しつつマシンの不備報告をしあいつつ、という感じで、理想的だと思っていました。でも、初めての敗北、対香港科技戦ですよね。
河島:恐怖心、負け方、という点で、あれは「初めてのショック」でした。
花守:あれは雰囲気的にヤバかった。負けると、各オペレーターのモニタに、敗北マークが出るんですよ。それがドクロマーク。あの部屋にも、「士気」というものが存在することを知りました。
河島:ふつうに負けたんですよね。もう何も言い訳できなかった。
花守:最初の負けが、確か残り数秒で逆転されたマッチだったんです。それ、僕が戦犯で。メンタルにきましたよ。
━━戦犯、ということはないと思いますが、どんな状況だったのでしょうか。
花守:あの時、基地のHPでは僕たちが有利でした。しかし、与えた総ダメージでは、相手が有利。つまり僕たちは基地を守りきらなければならなかった。ただその意識を徹底できずに、相手に一発撃たせてしまったんです。僕が相手の邪魔をしきれず、その一発で、基地のHPが並んでしまいました。
河島:その時、僕がオペレーションしていた歩兵も、曖昧だったかもしれません。相手を削りに行くのか守るのか。負け方を知らなかったというのがチームにとっては一番大きくて、ここで負けないようにするにはどうすべきだったか、その時に初めて知るわけです。
━━その他、具体的にはどんなコミュニケーションだったのでしょうか。次回以降の参加者の参考になると思うので、お聞きしてみます。
花守:基本的には淡々と進めました。敵が視界に入ったら報告、弾が無くなったら報告、弾を取りに行くときに報告、という感じです。ヒーローロボットを操作していた宮崎(拓真)くんが一番しゃべっていました。ヒーローの状況を伝えつつ、攻めるか守るか判断、というような。
河島:歩兵に関しては、ヒーローの援護に回るために、今から補給に行きます回復に行きます、という連絡があったとして、それを聞きながら前線に残るべきといったタイミングを見計らいながら、という感じでしょうか。
「フォーカス」という言葉もありました。複数台で1台を狙うことなんですが、「フォーカスされてます!」だったり、それで本当にやばくなると「やばいやばいやばい!」だったり(笑)。
━━指揮官的な人は、ヒーローオペレーターの宮崎さんだった?
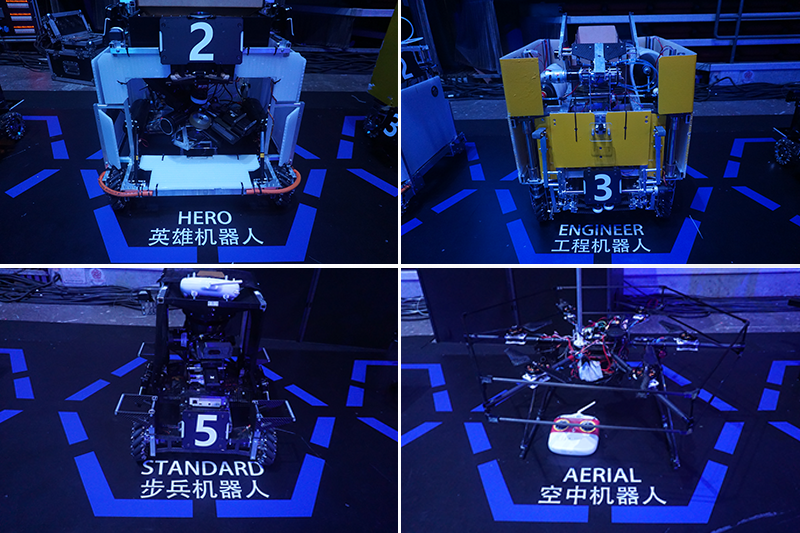
花守:指揮官、という立場はいないんですけどね。ただ、誰も指示を出せないような状況になると、一番操縦に余裕のあるドローンパイロットのむらつば(村田 翼さん)に聞いてみたり、という構図は出来上がっていました。ドローンは撃たれて死ぬ、っていう可能性がなかったので。そういう意味では、僕が操縦したエンジニアも死にづらいので、できるだけ周りを見たり、考えたりするようにしていました。
━━とはいえ、エンジニアロボットには42mm弾のローディングという重責もありました。ダウンした僚機の回復も必要ですし、忙しかったのではないでしょうか。
花守:まあそうですね。試合のたびに足がひしゃげて、毎回毎回修理が必要でした。その影響で、やろうと思ってもできなかったこともあったり、全体としてはてんやわんやでしたね。42mmのローディングに関しては、中国では1回しか成功していませんし。逆に、ローディングができないならもうひたすら妨害に回って、というような開き直りもありました。ちなみに、やはりエンジニアはやることが多くて、どのチームもアクシデントが多かった印象があります。

今回の連載の流れ
決勝直前! ロボマスター2018 @深セン現地レポート
【速報】ロボマスター2018深セン現地レポ・FUKUOKA NIWAKA参戦記
【速報】ロボマスター2018 決勝現地レポ〜ハイレベルなストラテジーを堪能せよ
ロボマスター急成長の理由〜日本のロボコニスト視点で分析
深セン華強北(ファーチャンペイ)で???!!!を探す:ロボマスター2018取材番外編
深センで「負け」を知ること〜ロボマスター日本初出場チームFUKUOKA NIWAKA大会後インタビューVol.1(今回)
呪いをかけられること~ロボマスター日本初出場チーム FUKUOKA NIWAKA大会後インタビューVol.2