第1回:消費電力の計算方法について
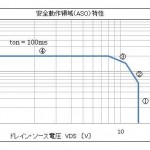
第2回:出力電流の絶対最大定格について
「モータドライバ博士のQ&A」では、よくあるお問い合わせを元に、ロボット製作者、エンジニアのみなさんに役に立つ技術解説を発信していきます。回答するのは、ローム株式会社モータドライバ開発課の藤井さん。名古屋工業大学電子工学科卒業後、ローム株式会社へ入社し、これまで数々の開発に取り組んできたモータードライバ一筋のエンジニアです。
第3回は、ブラシ付DCモータの簡単な駆動について回答します!
質問:ブラシ付DCモータで回転と停止の動作をさせたいのですが、簡単な方法を教えてください。
回答:一方向に回転させることと、停止させることのみの動作の場合は電源とブラシ付DCモータの間にスイッチを入れ、そのオンとオフとで行うことができます。このスイッチを半導体に置きかえると同じ動作をさせることができます。しかし、スイッチをオフした瞬間モータのコイルは電流を流し続けようとし高電圧を発生します。この電圧を抑制し半導体が壊れないようにするためモータと並列にダイオードを接続する必要があります。(Fig-1参照)
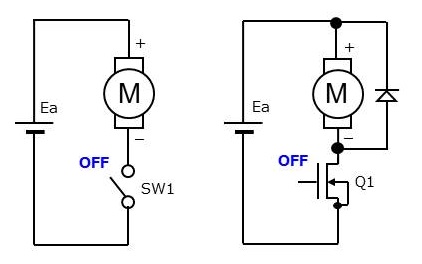
Fig-1 ブラシ付きDCモータ スイッチ回路例
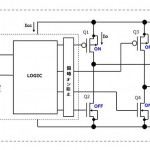
モータをDC電源にある+、-の極性で接続する状態と、モータをどこにも接続しない状態の2つを作るには一つのスイッチで可能になります。スイッチをオンするとモータが一方向に回り、オフすると電圧がからなくなり (空転して) 停止します。スイッチはGND側に入れても、電源側に入れても可能で、スイッチ部分を半導体のパワー・トランジスタに置き換えると実際の電子回路になります。回路例Fig-2ではGND側にNchMOSを電源側にPchMOSを使用した例を示しています。
ただし、実際の電子回路にはオフ直後にモータのインダクタンスが電流を流し続けようとして①ではモータのー端子側がGND以下に、③ではモータの+端子側が電源電圧以上に電圧が振れ、このモータの発生電圧は電源電圧値以上になります。このためパワー・トランジスタを使用する場合、パワー・ダイオードをモータと並列に接続しダイオード順方向電圧で発生電圧を抑制(クランプ)する必要があります。
Fig-2 ブラシ付きDCモータ スイッチ回路例
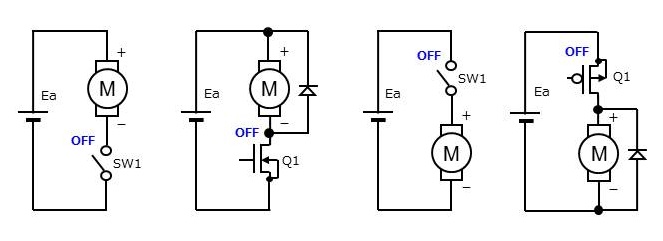
左から「①GND側にスイッチ」「②NchMOS使用例」「③電源+側にスイッチ」「④PchMOS使用例」
この回路構成のメリットはパワー・トランジスタが1個の単純な形で作ることができることであり、デメリットは1方向の回転しかすることができないこと、停止するのに空転で止まるため時間がかかること、逆起電圧のクランプ用にパワー・ダイオードが必要であることです。
また、MOSのゲートをパルス駆動できる構成にすると、PWM駆動が可能になり等価的にモータに印加する電圧を [電源電圧×オン・デューティ比] で変化させることができ、モータ回転数の制御が可能になります。PWM駆動でパワー・トランジスタがオフ時の回生電流はモータに並列接続するダイオードを通じて流れます。ダイオードの消費電力を考慮し、ダイオードのパッケージパワーも越えないようにする必要があります。
読者からの追加の質問
大変興味深い記事が多くいつも勉強になります。 記事において、用語の問い合わせです。
以前から疑問であったのですが、モータを動かしたりPWMで電圧を与えるだけでは、制御とは言えないのではないでしょうか。 モータドライバまでしか使っていないので、ドライブ方法=駆動方法についてであり、制御ではない気がしています。 周囲では、これはフィードフォワード制御だという意見もありますが、それならばモデルを立ててそれに基づく指令値を出さないと制御とは言い難いです。
純粋な疑問として、「駆動」と「制御」をどう使い分けているのか、ご教授いただけると幸いです。
質問者:S.K.S
追加の回答
「駆動」については、モータに対して電力を供給する回路側がどのような方法で行うかを表現する場合に使い、「制御」はモータを所望の状態(回転数、トルク、角度など)にするときに、モータが受ける信号を表現する場合に使うと考えます。
ブラシ付DCモータが受けることができる信号は電源からの電力になるので、電力供給の方法がPWMである時には、電力を与える側からブラシ付DCモータを見るとPWMで駆動しているので「PWM駆動」になり、ブラシ付DCモータが何により所望の状態になるかと見るとPWMで制御されているので「PWM制御」になると考えます。
(追記:2015年5月18日)
今回の連載の流れ
第1回:消費電力の計算方法について
第2回:出力電流の絶対最大定格について
第3回:ブラシ付DCモータの簡単な駆動について(今回)
第4回:PWM駆動による定電流動作について
第5回:PWM駆動の電流回生方法による差について
第6回:モータに最大の電流が流れる状態について
第7回:出力トランジスタの寄生ダイオードを通じて電流回生した時の消費電力について
第8回:モータにトルク負荷をかけた時のモータ電流について
第9回:モータの電気的時定数に対して十分に小さいPWM周期について
第10回:1個のMOSFETでモータをPWM駆動させるときのモータに並列接続するダイオードに流れる電流について