前回、Lazuriteの省電力っぷりに驚きましたが、今回はその特徴を活かしてスタンドアローンで動く水やりマシンを作ってみます!これまで制作物のケースはバルサ材などの木材や、LEGOなどを使っていましたが、今回はちょっと背伸びをして3Dプリンターでケースも作ってみました。その過程を、写真を多めでお送りいたします!
なお、水やりマシンの基本的なしくみや回路については第22回で紹介していますので、そちらも併せてご覧ください!
今回の電子工作レシピ
時間目安:60分
必要なパーツ
- Lazurite Basic
http://www.zaikostore.com/zaikostore/itstoreRohmLazurite?mid=13(ザイコストアドットコム)
http://www.chip1stop.com/search.do?dispPartIds=ROHM-0156298|ROHM-0156304|ROHM-0156305&dispAllFlg=true&makerCd=ROHM&cid=ROHM_Lazurite(チップワンストップ) - ブレッドボード http://www.sengoku.co.jp/mod/sgk_cart/detail.php?code=3DBC-TCK4
- 小型ポンプ http://www.amazon.co.jp/dp/B00Y0R4JFQ/re…3%83%97
- Arduino土壌センサー http://www.amazon.co.jp/Arduino-%E5%9C%9…/dp/B00FXIO4U6
- Arduinoプロトシールド https://www.switch-science.com/catalog/839/
- 電気二重層コンデンサ 25F 5.4V http://akizukidenshi.com/catalog/g/gP-09303/
- 携帯機器用ソーラーモジュール 300mW http://akizukidenshi.com/catalog/g/gM-06564/
- LDO3端子電圧レギュレータ(出力5.0V)【BA50DD0T】 http://www.marutsu.co.jp/pc/i/127890/
- 電解コンデンサ 33μF~100μF 16V~35V http://akizukidenshi.com/catalog/g/gP-03122/
- 積層セラミックコンデンサ 0.1μF 50V http://akizukidenshi.com/catalog/g/gP-00090/
ケースをモデリングして3Dプリンターで出力!
まずはケースを作成します。水やりの対象となる植物に合わせて、ケースをデザインしていきます。ケースのモデリングで利用したソフトウェアはAutodesk社の「123D Design」です。(※注:123d designはアプリの配信が停止されてしまったため、現在Fusion360などでモデリングが可能です。)Windows / Mac両方で利用できる無料の3Dのモデリングソフトウェアです。たまに「CAD – computer aided design」(キャド)という言葉を聞いたことがあるかもしれませんが、そのCADソフトウェアに分類されるのがこの123D Designです。
3Dプリンターのモデリングソフトウェアとしては、わかりやすく使いやすいので入門としてはお勧めのソフトウェアです。
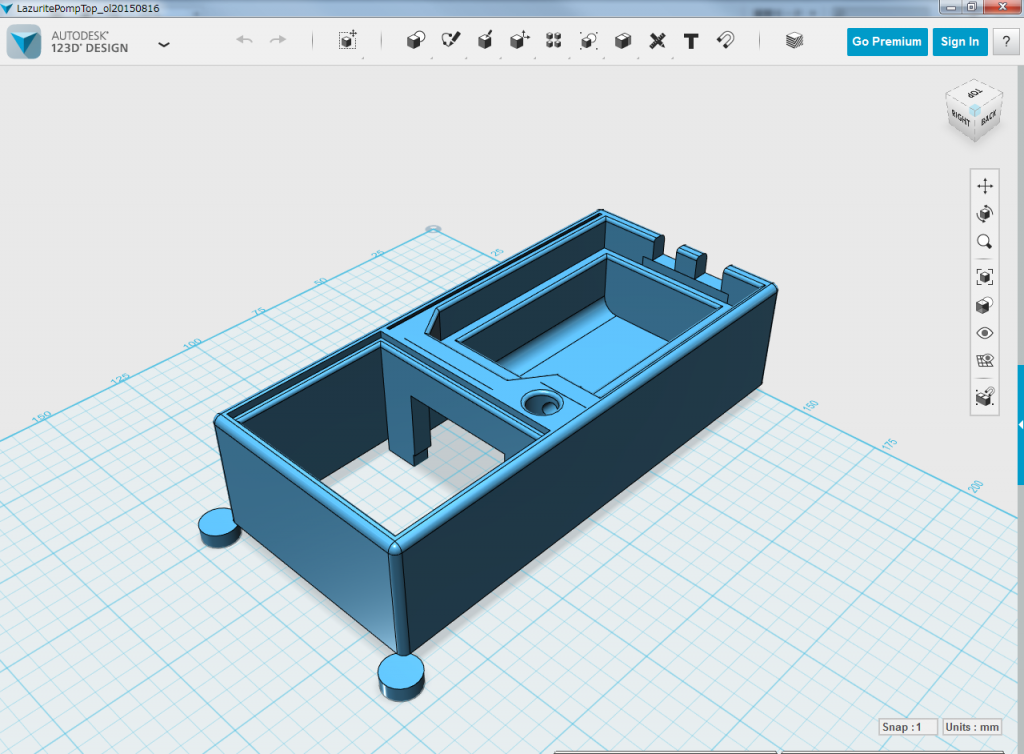
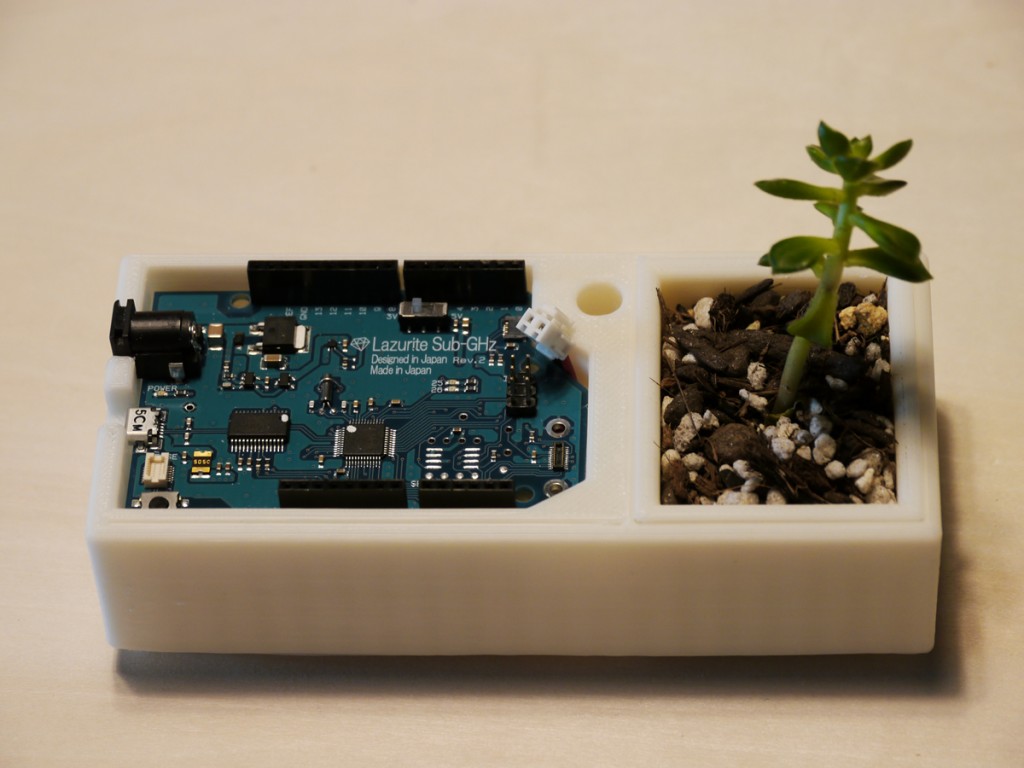
図1.製作途中の水やりマシンのケース(上側)
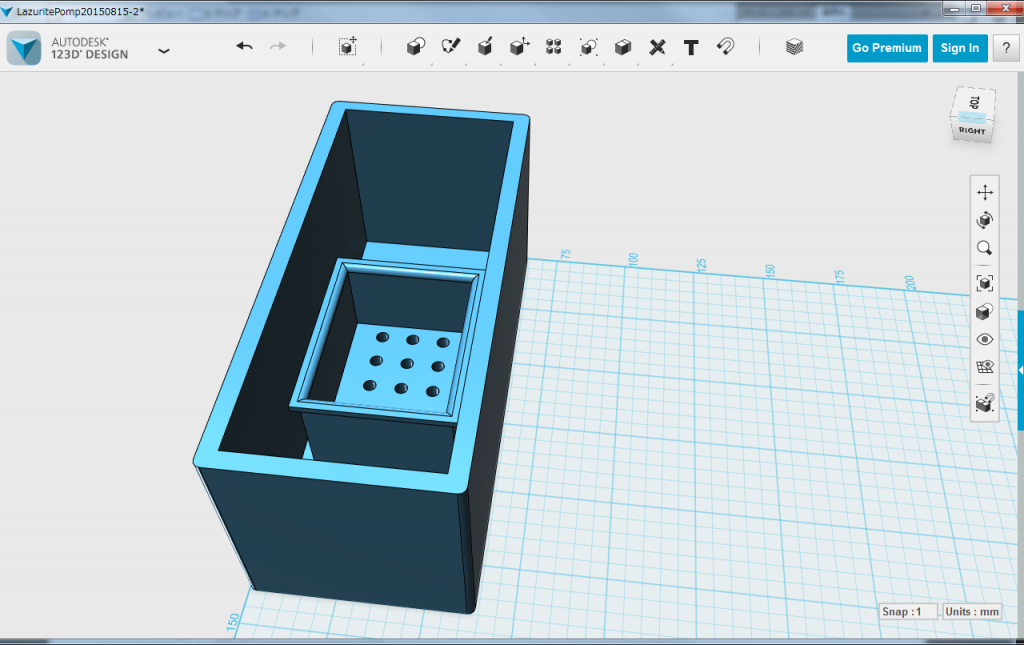
図2.製作途中の水やりマシンのケース(下側)
モデリングが完了したら、実際に印刷していきます。今回ケースは、13cm×5cm×10cm程度のサイズで、3Dプリンターで大体一日かからないくらいの時間で出力できました。3Dプリンターは一回起動させてしまうと、止められないので、ケースのモデリングの構想や実際の作成に少し時間をかけて考えて設計するのがお勧めです。実際、3Dプリンターに慣れていないと、せっかくきれいに出力できても、構造がおかしかったりプリントをやり直さなければいけなくなるので設計はしっかりしましょう(筆者はこの形にたどり着くまで4回くらい失敗しました…)。
下記写真1が実際にモデリングしたデータを3Dプリンターで出力したものになります。

写真1.3Dプリンターで出力されたケース部品
今回、水の供給部分のパーツに、サーボモーターではなく小型ポンプを使います。底のケースに水を入れて、必要に応じてポンプで植物に水をあげる仕組みにしました。ケースの上部にある穴を通じてポンプにつけたホースを出しています。(3Dプリンターの出力したそのままでは水漏れがしてしまったので、ちょっとかっこ悪いですが食品用ラップでカバーしています)
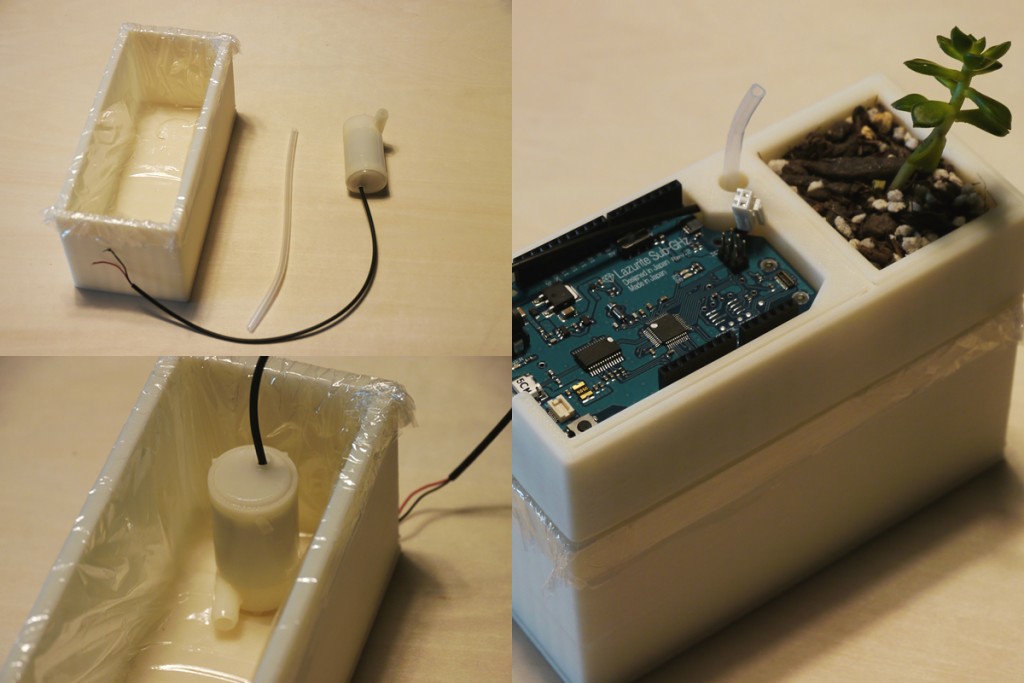
写真2.ポンプによる水の供給部分
ケースの上部は、スタンドアローンで動作する水やりマシンなので、電力の供給源になる電気二重層コンデンサ(スーパーキャパシタ)の格納場所も用意してみました。

写真3.電気二重層コンデンサ(スーパーキャパシタ)格納場所
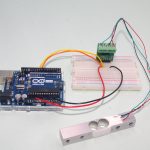
電気二重層コンデンサ(スーパーキャパシタ)の上に、ラズライトを設置します。このぴったりはまる感じが3Dプリンターで作成した場合に感じることのできる喜びですね。
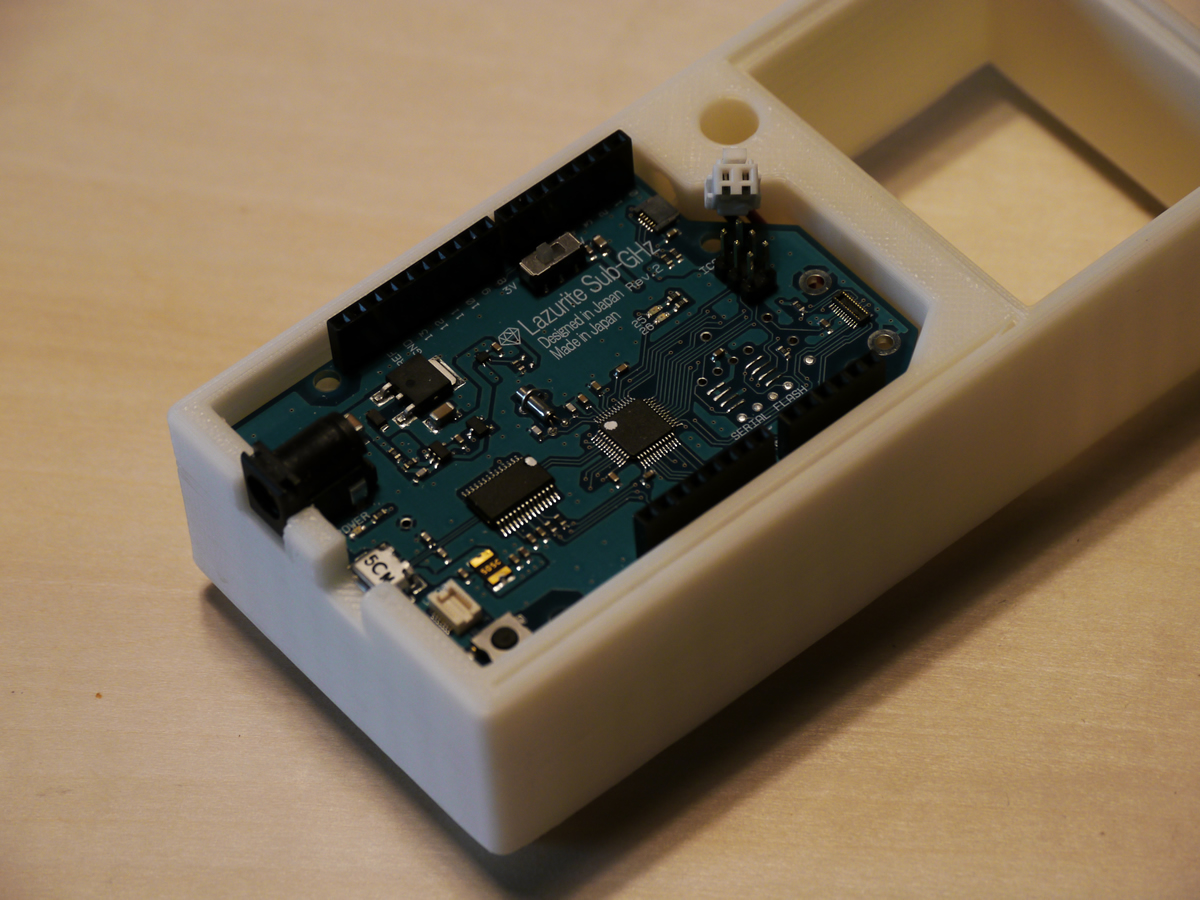
写真4.電気二重層コンデンサ(スーパーキャパシタ)の上にラズライトを設置
今回のケースは、ラズライトの基板と植物が隣り合わせになるようなデザインにしてみました。もっと実用的なケースを、と最初考えたのですが、電子回路と植物を一緒に眺めながるのもすてきだな、と思い、このようなケースにしてみました。
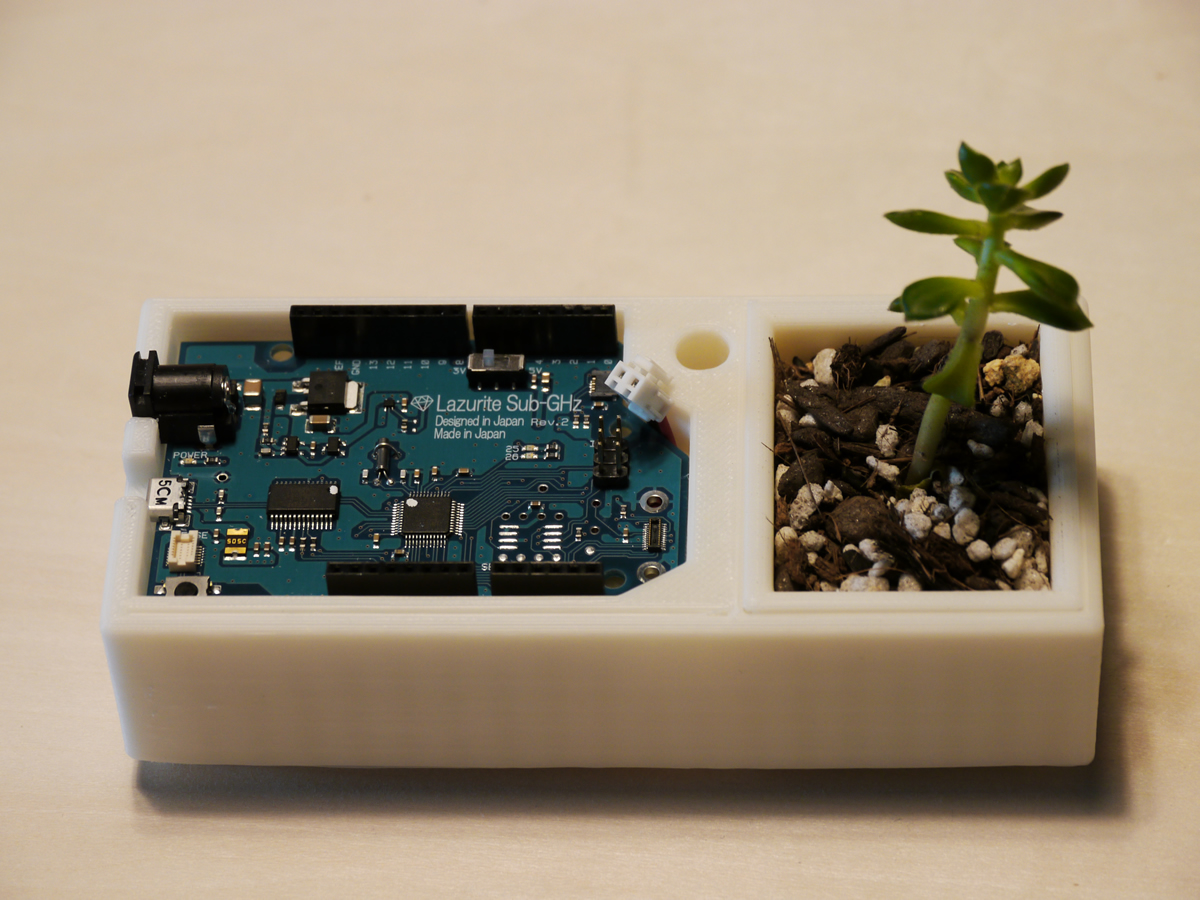
写真5.ラズライトの基板と植物が隣り合わせ
回路を組み立てる
さて、出力したケースにラズライトがきちんと収まったので、回路を作成していきます。まず電源部分として、第27回で取り組んだソーラーパネルを使ってラズライトを動かしてみます。前回ラズライトがArduino UNOよりかなりの省電力で動くことがわかりましたので、ソーラーパネルの枚数も少なくても大丈夫です。ただし、利用しているソーラーパネル1枚あたりの最大出力電圧が約5Vなので、晴天など出ない場合、電圧が足りなくてラズライトが起動しない場合が多くなってしまうので、最初4枚でテストを始めて、最終的にソーラーパネルを2枚直列につなぎ、電圧を確保した上で、3端子電圧レギュレーターで5Vにすることにしました。
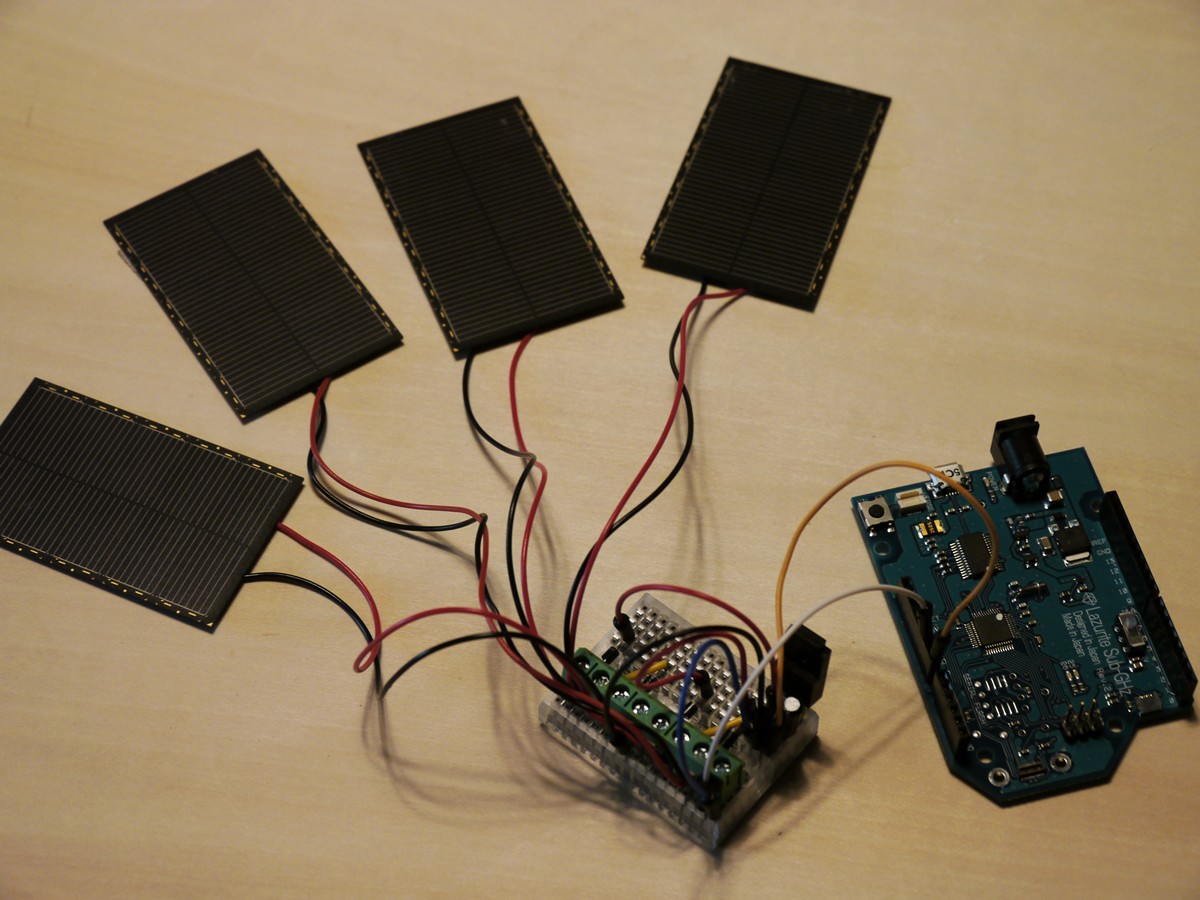
写真6.ソーラーパネルでラズライトの動作チェック
回路図は下記になります。(fritzingの関係上、基板がArduinoUNOになっていますが、ラズライトに置き換えて読んでください)
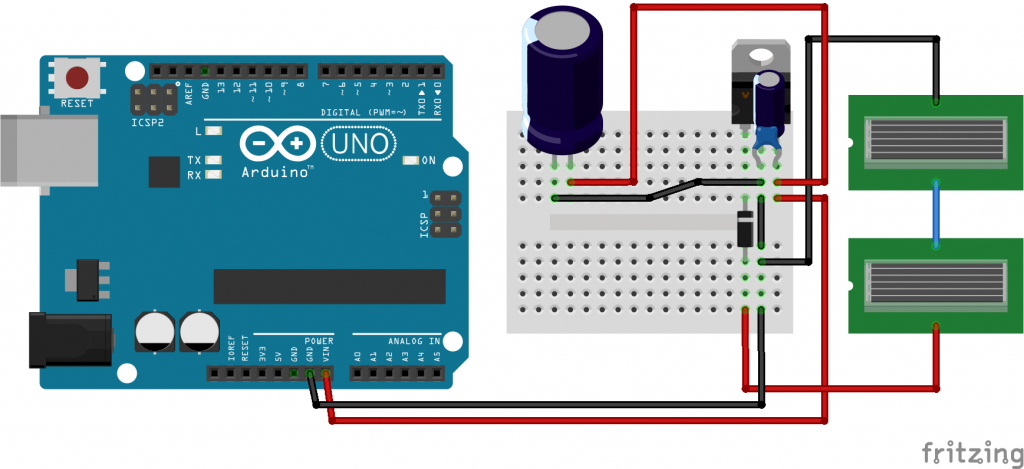
図2.ラズライトの電源回路
回路図が決まったら、久しぶりにシールド化に挑戦してみます。今回はArduinoのプロトシールド(基板のみはこちら)を使ってパーツをハンダ付けします。
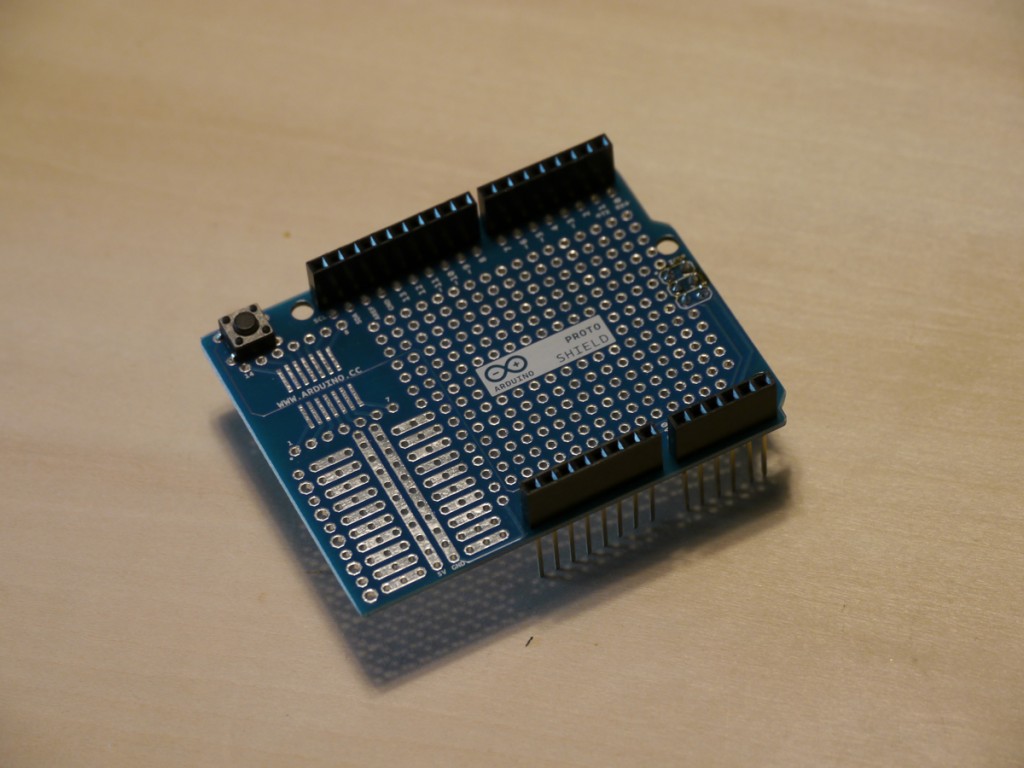
写真7.Arduinoプロトシールド
先ほどの回路図を見ながら、パーツをハンダ付けしていきます。
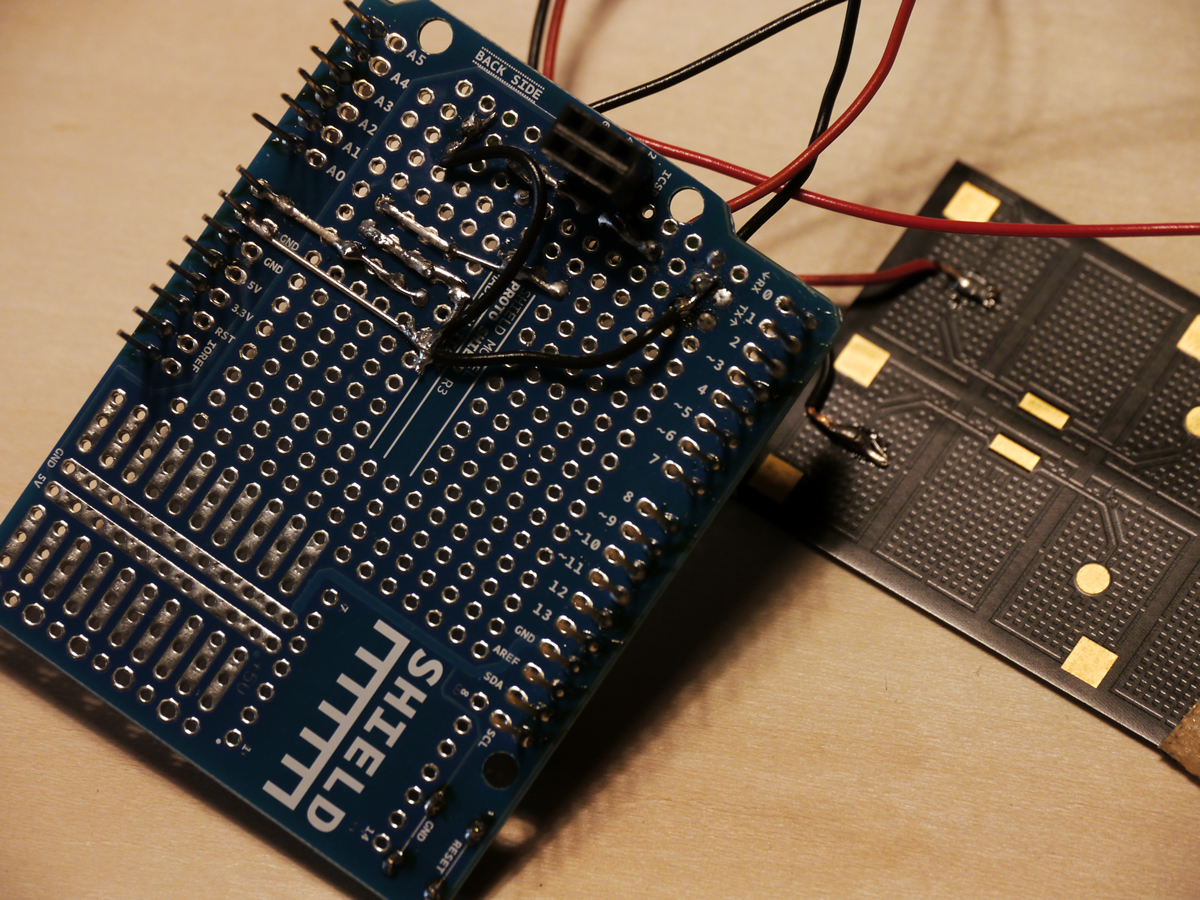
写真8.プロトシールド基板にハンダ付け
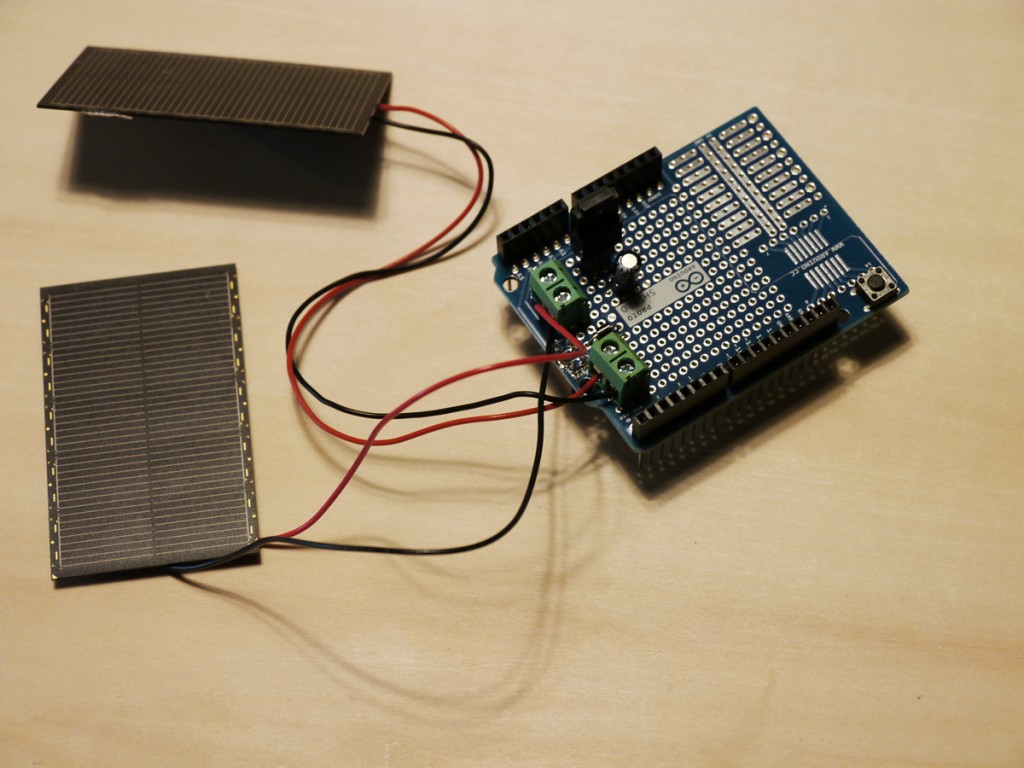
写真9.ソーラーパネルの取り付けが完了
ハンダ付けが完了したら、正常に動作するか確認します。ここで、うまく動かない場合、ハンダ付けが失敗している可能性があるのでハンダ吸い取り器やハンダ吸い取り線などを使って、ハンダ付けをやり直しする必要があります。
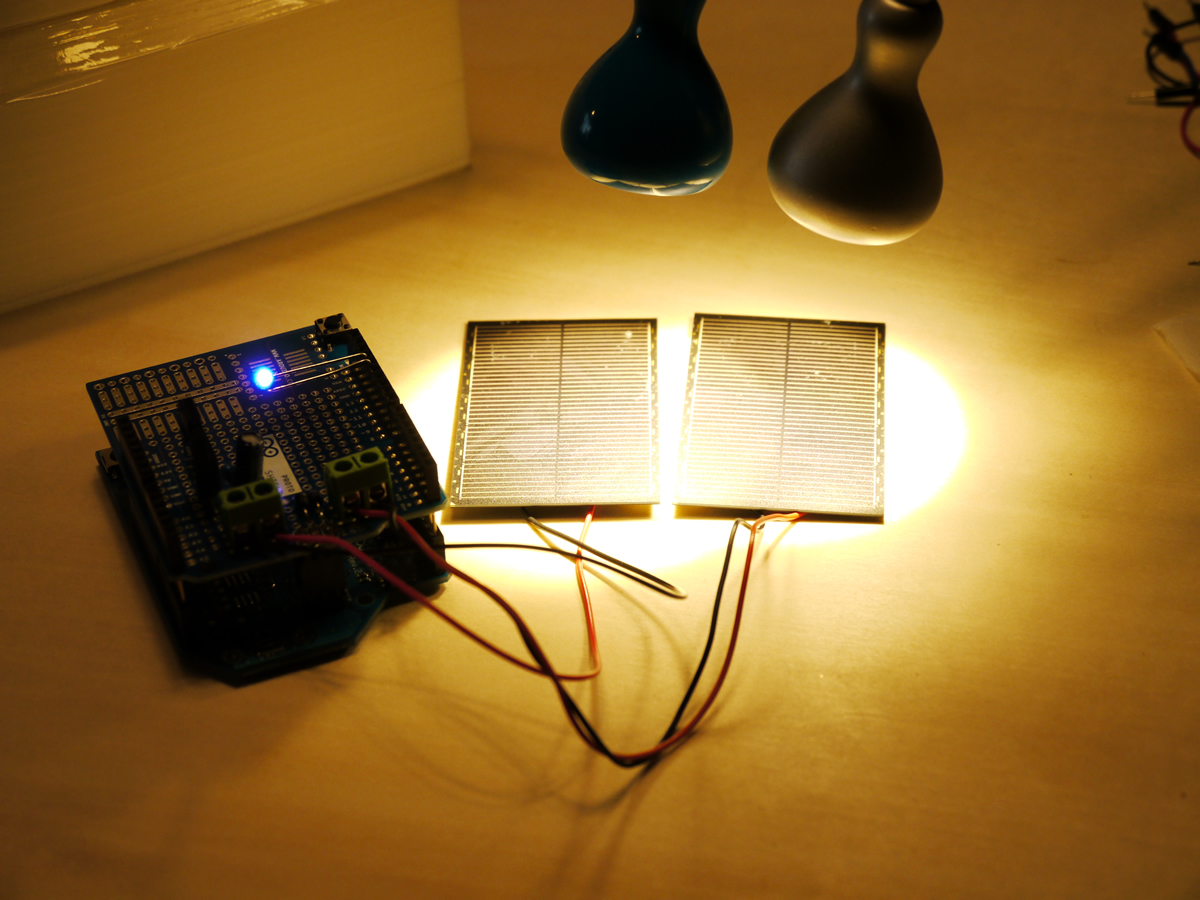
写真10.ソーラーパネルでの起動テスト
ソーラーパネルでの起動確認ができたので、残りのパーツをつけていきます。電気二重層コンデンサ(スーパーキャパシタ)とポンプ、そして土壌センサーをつけます。今回も水やりマシンを少し改良して、水の供給をサーボモーターではなく小型ポンプに、土の水分を測るのには釘ではなく、土壌センサーを利用しています。この土壌センサーは基本的に、アナログ・デジタルどちらでも数値を受け取ることができるセンサーです。今回はこれまで利用していた釘と同じようにアナログで数値を受け取るようにしました。
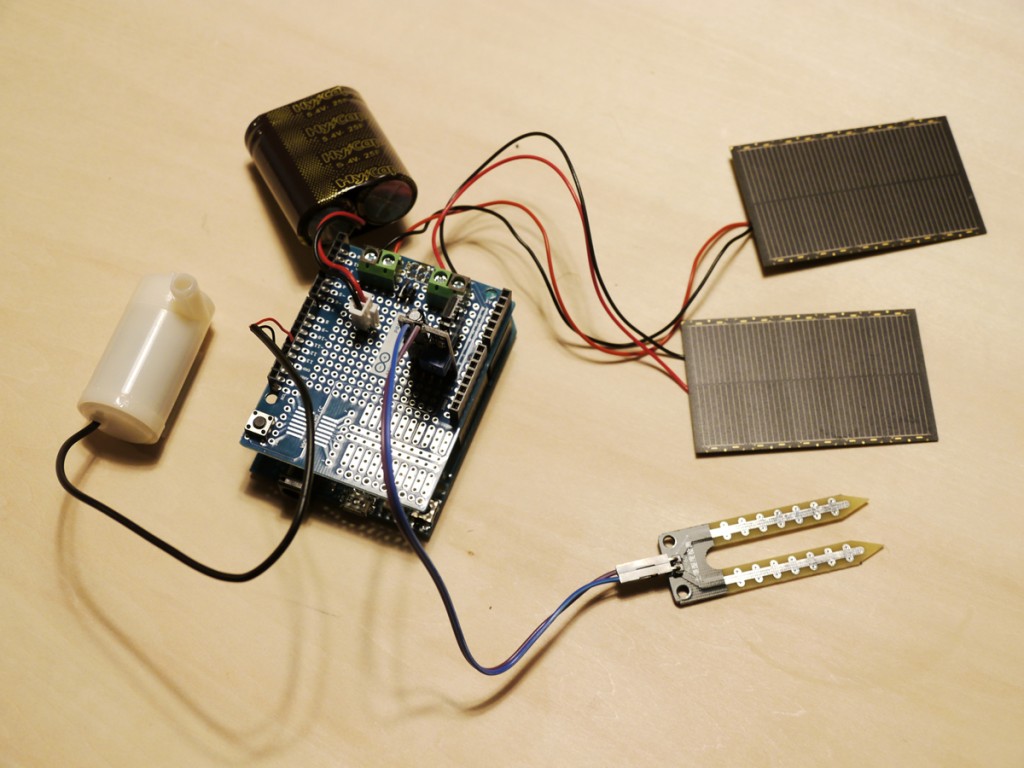
写真11.回路部分を組み立て
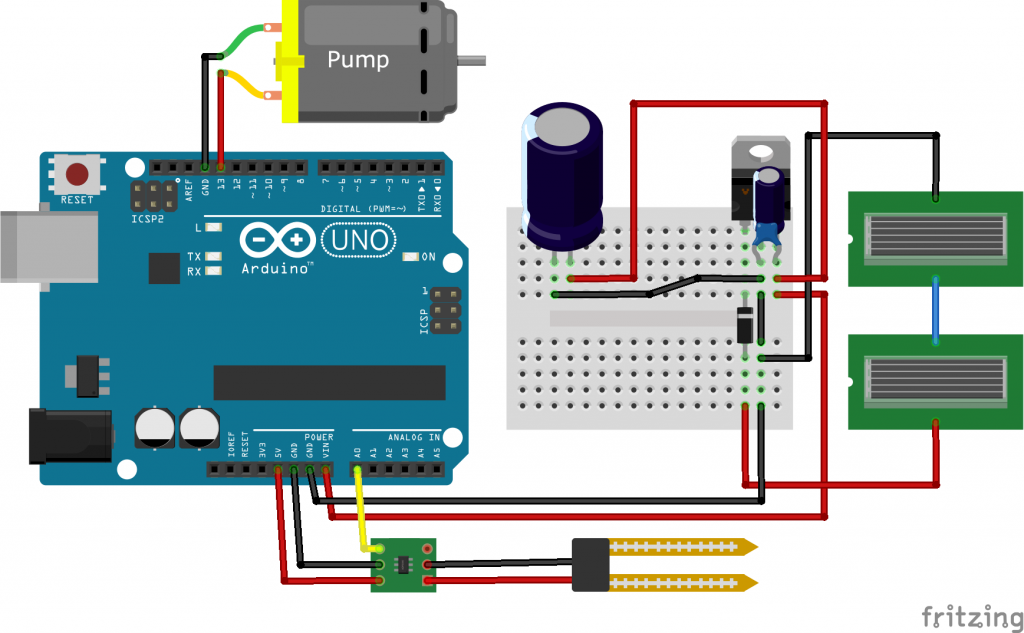
図3.水やりマシン回路全体図
ケースに回路を格納して完成!
回路部分ができたら、ケースに残りのパーツを配置していきます。ケースには、上部にソーラーパネルを挟み込む隙間を用意して、ソーラーパネルを斜めに配置できるデザインにしました。
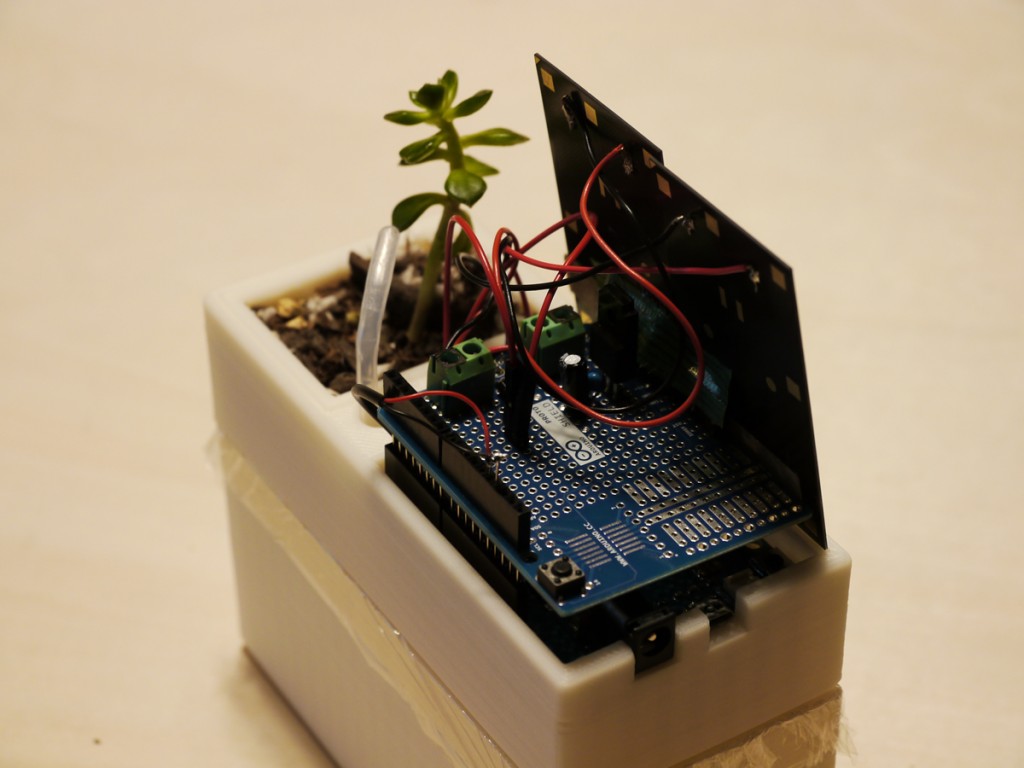
写真12.シールドとソーラーパネルを設置
土壌センサーをつけて、完成です!
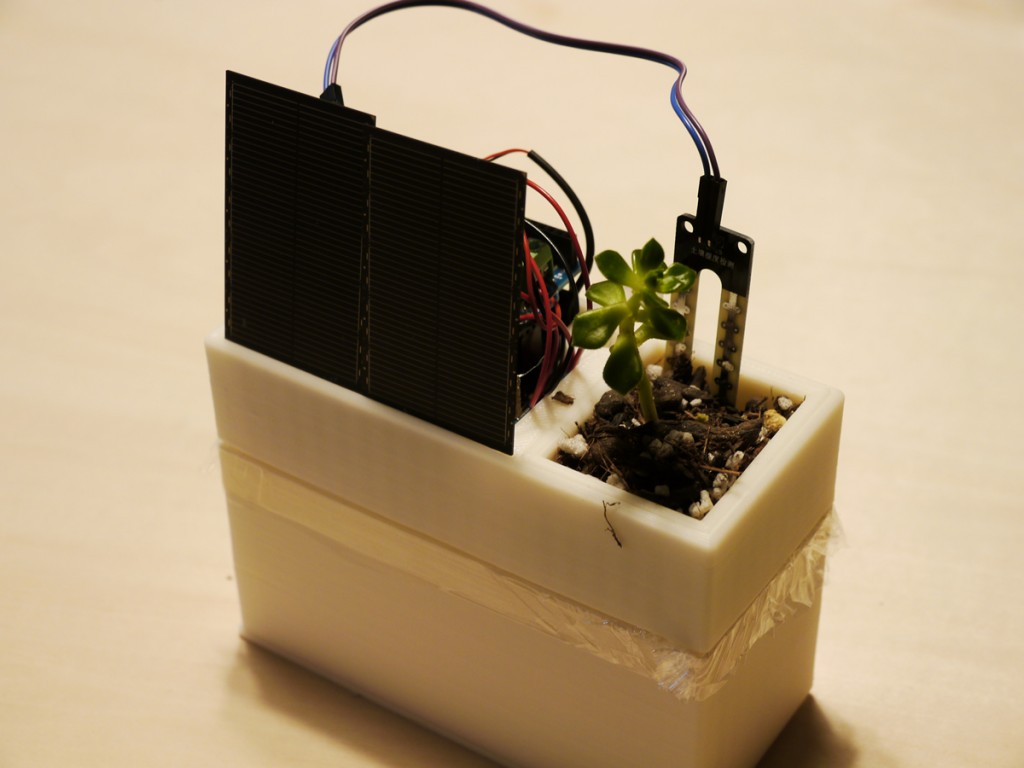
写真13.ラズライト水やりマシン完成
まとめ
ラズライトを使って水やりマシンが完成しました!今回はデスクサイドに置けるような小ぶりなケースにしましたが、すでにある鉢に取り付けられるケースにしてみたり、これまでのようにサーボモーター方式で給水するタイプにしてみたりと、いろいろな水やりマシンができますので、ぜひ挑戦してみてください。また、ソーラーパネルも、もっと発電能力の高いものに変えたり、電気二重層コンデンサ(スーパーキャパシタ)を大きいものに変えれば、さらなる安定稼動ができます。
今回、水やりマシンのケースを3Dプリンターで出力したのですが、せっかくなので、ラズライトBasic専用のケースもモデリングして出力してみました!これで、今後は基板そのままむき出しで開発しなくてすみそうです。

写真14.Lazurite Basicケース
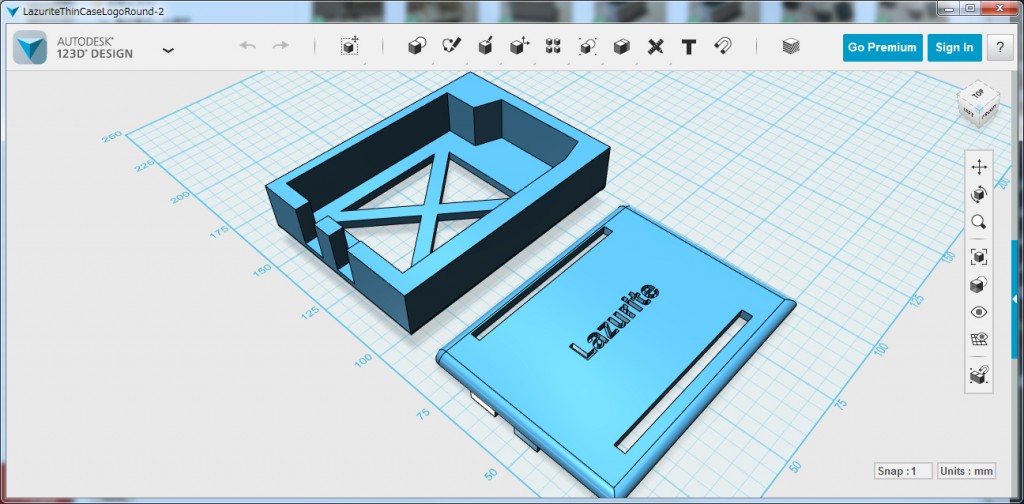
写真14.Lazurite Basicケースのモデリング画面
資料:今回使った各種モデリングデータについて
今回モデリングしたケースのデータを下記に置いておきますので、3Dプリンターをお持ちで作成してみたい方はご活用ください。
http://www.123dapp.com/MyCorner/akagawa_sh_…-26766851/models