某自動車会社の若手技能員が、楽しいモノづくりの世界で生み出した乗り物
「ROHM OPEN HACK CHALLENGE(ROHC)」 は、ローム製のセンサやマイコンボードを駆使してプロトタイプ作品を募集するコンテスト。2018年は6月から8月にかけて作品を募集し、優秀作品は、賞金がもらえると同時にCEATEC JAPANのロームブースにて展示。来場した多くの方に作品が紹介されました。
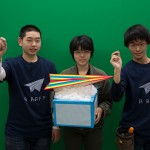
そのROHC2018で最優秀賞の一つを獲得したチーム「Skilled Workers」に、受賞作品となった「筋斗雲型モビリティ:きんとん」に対してのこだわりや、開発時に苦労した点などを伺ってみました。
「筋斗雲型モビリティ:きんとん」は、如意棒や、頭部に身につける緊箍児(きんこじ)デバイスなどで無線操作できる、室内パーソナルモビリティです。

──どんなチームでこの作品を作ったのですか?
某自動車会社の若手技能員で構成されています。ものづくりが好きで、ハッカソンやコンテストに積極出場。楽しくものづくりすることを主軸に、多方面で活動しています。
──他にはどんな作品を作っているのでしょうか?
楽しく遊べる音楽再生型のボール「Funny Ball」、映画ハリーポッターのクィディッチを再現させた箒型のパーソナルモビリティ「ext-broom」、コーンポタージュの粒を全部飲み干せる作品「コーンぽたぽた」、人の動きに反応する照明器具であるスマートライト「AKARI」など様々です。
「Funny Ball」はROHC2017に応募して優秀賞を、「ext-broom」はMashupAwards2017に応募して最優秀賞(forPRO)をいただきました。「コーンぽたぽた」はソレノイドコンテストに、「AKARI」はJetsonコンテストに応募した作品になります。
──ハッカソンやコンテストなどの課外活動に参加するようになったきっかけは?
社内で似たようなコンテストが開催されており、社外のコンテストにも参加するようになりました。社内コンテストの場合は、会社の会議室が利用できたり、制作補助資金が支給されることもありますが、社外へのコンテスト応募は完全に有志での取り組みであり、社内のものとは事情が違います。しかし、社内の活動では得られない楽しさに魅力を感じています。今回のROHCも同様です。
──課外活動の楽しさって何ですか?
普段あまり出会うことのできない、社外の様々な人と交流できるところです。審査員やコンテスト参加者など、違う分野の有識者のアドバイスはとても参考になります。展示会などのイベントでは、様々な人に作品を手に取って体験いただくことで、気づかせてもらうことが多くとても刺激的です。また、社内でチャレンジしたいけれどできないことをお試しでできたり。仕事でモビリティを作っても試乗してもらうだけで大変ですが、課外活動であれば軽いノリで試乗してもらえます。
社外活動ですと、開発場所が悩みどころですが、近くに「ものづくり創造拠点 SENTAN」というファブスペースがあることも、このような課外活動を継続的に楽しくできている理由の一つかもしれません。
社内コンテストが10月11月頃にあり、その後展示という流れが多く忙しいので、いつも年始に好きなものを作っています。
筋斗雲という夢の乗り物を、子供達が実装できるようリメイク

──今回ROHCで優秀賞を獲得した作品について詳しく教えてください。
筋斗雲の特徴を活かした、室内パーソナルモビリティです。瓢箪デバイスと、ローム製品のセンサメダルを搭載した緊箍児デバイス・如意棒デバイスで筋斗雲型モビリティを操作します。
主な特徴は以下の3つです。
①フワフワ感:外装はクッションを用いることで柔らかさ(雲らしさ)を再現
②遠隔操作技術:Sub-GHz通信により、混線時でも安定した通信、より遠隔での操作を実現
③ハンズフリー:センサメダル内蔵のデバイスを頭部に身に着けることで、両手フリーで操作可能
※センサメダルとは、加速度、気圧、地磁気、照度、磁気、温湿度の計6種のセンサを搭載した基板。今回開発に仕様したセンサメダルはすでに販売を終了していますが、後継機種(SensorMedal-EVK-002)が展開されています。
【作品の主要諸元】
寸法:500mmx600mmx250mm
重量:約8kg
電源:24V(6セルLipo)
最小回転半径:0m(その場旋回可能)
連続走行時間:約1.5時間(人の乗車可否・重量で可変)
最大積載重量:100kg
こちらの動画をみていただけると、どんな作品なのかわかりやすいかと思います。
──なぜこの作品を作ろうと思いついたのでしょうか?
実はこの作品、2015年に(別コンテストで)開発した作品のセルフリメイクなんです。ローム製品を活用しながら、もう一度作りたいと思い、リメイクに至りました。
──リメイクのポイントはどんなところでしょうか?
2015年バージョンからの変更点を並べるとこんな感じです。
1.呼べば来る、ついていく → 呼んでも来ない、無視する
2.腕の筋電を読み取って操作 → 外部デバイスで操作
3.開発費50万円 → 開発費6万円
以前のバージョンは、社内で予算がでた関係からリッチ仕様でしたが、今回のリメイク版では、頑張れば作れるコスト感に抑えたと同時に、発想の自由度をあげるため多様なインターフェースを実装しました。
筋斗雲は「夢」の乗り物です。未来の子供達が「夢」を実装できるようなものにしたいと考えリメイクしました。「モビリティ」は「子供達」と共に進化、成長していってほしいと思っています。今回制作した「きんとん」はそのきっかけにしたいです。
ROHC後にも改良を加えており、現在はmicro:bitで操作できるようになっています。なので、子供自らがインターフェースを作り込むことも可能です。
──開発にあたり、こだわった点はありましたか?
「筋斗雲」の世界観です。一般的なモビリティのイメージは硬そうというものですが、筋斗雲のフワフワした可愛らしさも表現したく、クッションで実現しました。
中でも、一番こだわった点は、インターフェースです。孫悟空が身に着けている様々なモノをヒントに、「瓢箪」「緊箍児」「如意棒」など複数の操作デバイスを開発しました。それらは、Fusion360で設計、3Dプリンタで造形し自分たちで塗装しました。中にセンサメダルを内蔵するにあたり、搭載のしやすさや、サイズ感・操作感等は特にこだわりました。
開発を進める中で、緊箍児は脳波操作してみたいと強く思いましたので、ロームさんには、ぜひ脳波センサも開発していただきたいです。

センサメダル内蔵の「緊箍児」
──どんな点に苦労しましたか?
低コスト化です。モータやドライバの選定、人が乗れる最小出力の見極めなど。
──今後はどのような展開をお考えですか?
教育、学習用モビリティを目指しています。micro:bit等も組み合わせることで、より子供向けのプログラマブルなモビリティへ進化させ、子供たちが、もっともっと自分でインターフェースを作りこめるようにしていきたいです。
ROHCに参加してみて
──ロームのどのデバイスを利用しましたか?
使用したロームデバイスは、センサメダル、Lazurite、センサシールド、の3つです。
物の姿勢角でモビリティを操作してみたく、「センサメダル」は一番に選定しました。また、モビリティなので安全性も兼ね、より堅牢な通信帯も!ということで「SubGHz(Lazurite)」を選定。そして、ローム製品以外の各種センサも、I2C通信が主だったため「センサシールド」を選定しました。
ローム製品は省電力駆動なので、長時間試乗・小型インターフェースのモビリティにはとても有用でした。
※今回開発に仕様したセンサメダルはすでに販売を終了していますが、後継機種(SensorMedal-EVK-002)が展開されています。
──ROHCに参加したきっかけを教えください
2017年、メーテレ主催のハッカソン「メイキンクエスト」に出場した際、ローム製品を活用。そしてロームスタッフの方と交流する機会もあり、ROHCのことを知りました。
その年に出場し、惜しくも最優秀賞を逃したため、リベンジで2018年も出場。見事、最優秀賞を勝ち取り、雪辱を晴らせました。
──来年以降、ROHCに参加する方にメッセージをお願いします
とても楽しくものづくりできるコンテストです。アイデアだけで実現性に困っていたとしても、スタッフや他チームの方に助言いただけるので、安心して開発できます。気軽な気持ちで、ぜひ参加してみましょう!ただ、来年も我々が最優秀賞をいただくつもりですので…笑
今回の連載の流れ
第1回:某自動車会社の若手技能員が、楽しいモノづくりの世界で生み出した乗り物〜ROHC2018 優秀作品インタビューVol.1〜(今回)
第2回:ライブ演出経験のあるエンジニア2人が目をつけた「Sub-GHz帯無線通信技術」〜ROHC2018 優秀作品インタービューVol.2〜
第3回:エンジニアリング+ゲーミフィケーションで「エアコンのもったいない」を解決する高校生〜ROHC2018 優秀作品インタービューVol.3〜
第4回:2〜3台の気圧センサとマイコンで作れる家庭用簡易防犯システム〜ROHC2018 優秀作品インタビューVol.4〜
第5回:カラーセンサで好きな色を読み取り、5色の絵の具で色を再現~ROHC2018 優秀作品インタービューVol.5~