はじめに
こんにちは、河島と申します。ロボットをつくる人です。
前編では全自動二度寝支援装置『アトゴフンダケ』を例に、作品のアイデアを生み出すフェーズについてお話しさせていただきました。後編では作品のアイデアや方針が決まった後、実際に開発をするフェーズについてご紹介させていただきます。
ラフスケッチを描く
まずはすごく簡単にスケッチを描きます。私は絵があまり上手ではないので「文字だけのメモでいいや~」となりがちなのですが、スケッチを描くと「この機構より、あの機構のほうがいいかも…ここの見た目ちょっと変えたいかも…」といった試行錯誤を短い周期で行えるので下手でも描いてみるといいと思います。
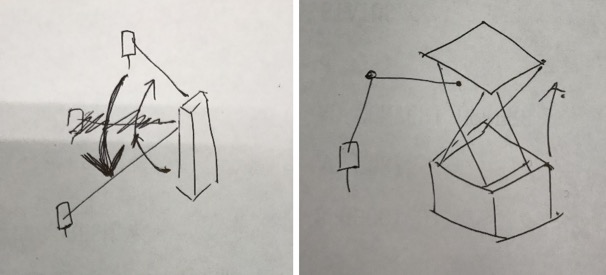
こちらが当時実際に描いたスケッチ。我ながら下手ですね。左のスケッチは描いた本人が見ても何を意味するのかよくわかりませんが、右のスケッチはパンタグラフでの展開や水平多関節っぽさが見えてきています。
この段階で「この機構はあまり現実的じゃないな~」というのがわかると、後で大きな問題が出ることの予防にもなります。
使える環境から開発プロセスを考える
使える環境というのは、3Dプリンタやレーザーカッターなどの工作機械、工具、パソコンやインストールされているソフトウェアなど、製作に必要なもの全てのことを指します。学校やファブスペースなどの施設に設置されている工作機械を使えるととても便利ですね。私は普段から利用していたファブスペースに設置されているレーザーカッターを活用し、3Dプリンタは自宅に設置しているものを使いました。
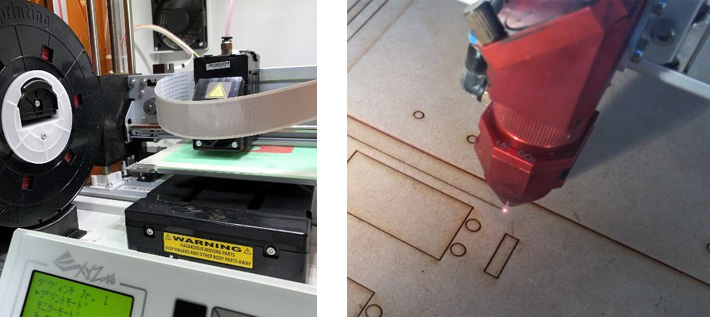
3Dプリンタとレーザーカッター
もちろん開発を進める際に「レーザーカッターと3Dプリンタを使わなければならない」ということはありません。手工具を使った加工でも大丈夫ですし、はさみやカッターナイフで加工できる素材を選ぶという方法もあります。みなさんが得意な方法、チャレンジしてみたい方法など好きなように計画してみると良いでしょう。
私はこれまでロボコンなどでロボットを作るときは電子回路やプログラムを主として担当していたため、機械のCAD設計や加工はあまりやったことがない領域でしたが、今回の作品制作を通して機械の設計加工スキルも少し身につけておきたいなというモチベーションもありましたので、この機会に3D-CADとデジタル工作機械を使った加工にチャレンジしてみることにしました。

初めてチャレンジするため、いろんな形状を印刷して試行錯誤しました。
電子回路の製作については、回路基板のパターン設計をして生基板を切削加工したり外注したりする方法も考えられますが、今回は「試行錯誤しつつサクッと作ることを第一優先にしたい」という気持ちになりましたので、Arduinoにバニラシールド(ユニバーサル基板のような穴が空いている)を取り付けて必要な電子部品を搭載していこうというプランに決めました。
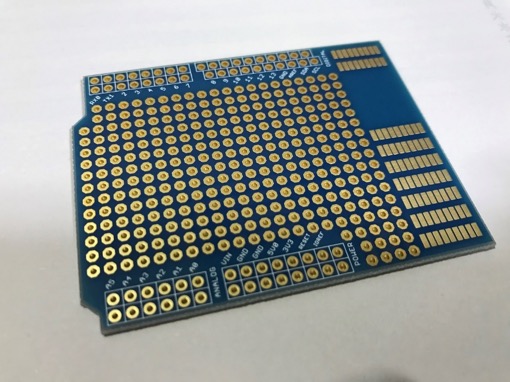
Arduino用バニラシールド基板
スケジューリング
チームで開発する場合は例えば機械担当と回路担当で分かれて同時並行に作業を進めていくことができますが、今回は一人で全ての作業を進めることにしたため、同時に2つの作業を行うことは困難です。そのため全てのタスクは時間軸に沿って直列に連なっていきます。
作業のスタートとデッドラインの日付を決めて、その間の日数で作品を制作していくわけですが、この段階で「どの作業にどれくらいの日数をかければ達成できそうか」「トラブルが起きやすそうな作業はどれか」をあらかじめ予想できると、作業を進めていきながら「進捗何パーセントくらいだな」といった進捗状況をざっくりと把握することや、1日何時間くらい作業をすればいいのかといった目安がわかるのでおすすめです。

実際に行った作業の実績。初めに一次試作を行い、そこで見つかった問題点を次の仕上げのフェーズで修正して作業を進めました。
ただ、初めてチャレンジする作業についてはどれくらいの時間が必要になるかがわからないというのが正直なところです。そういった時間の見積もりができない作業については「できるだけ早く、いっぱい頑張る」という感じで頑張っていきましょう。そんな状況で役に立つスケジューリングのフレームワークがあったりするかもしれませんが、難しいことで悩むよりできるだけ早く手を動かしたほうがいいということもよくあります。
機械設計と部品加工
まずは機械設計です。『アトゴフンダケ』全体の設計を3D-CAD(Fusion 360)で進めていきます。CADで設計する上で気をつけなければならないのは、設計した部品が実際に加工可能な形状なのかという点です。例えば、家庭で使える3Dプリンタはどんな形状でも印刷できるわけではなかったり、レーザーカッターで作る部品はその機材の出力(ワット数)でカットすることが可能な素材・厚みにも限界があったりします。このあたりのノウハウは実際に同じ機材を使ったことがある方に聞いてみるといろんな発見があるかもしれません。
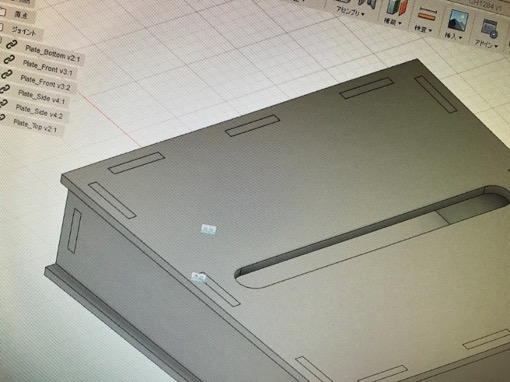
最初にモデリングした本体部分です。長穴をスライドレールのようにしてアームを展開しようと企みましたが、「摩擦がヤバそうだな」と設計中に危険を察知し、実際には使わずボツ案となりました。
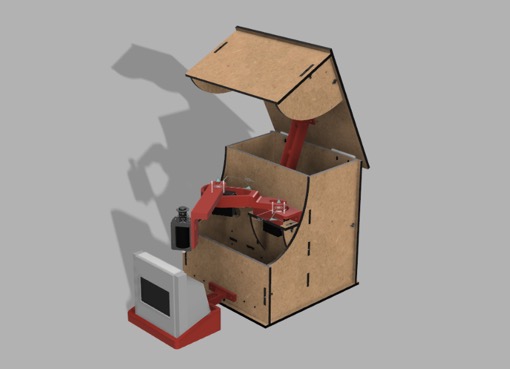
たくさんの試行錯誤を繰り返し、最終的にこのような形になりました。
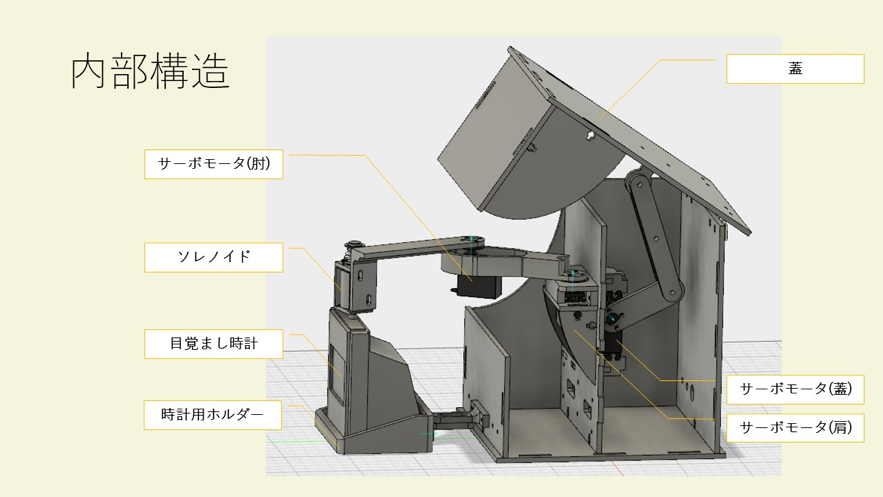
内部の機構はこのようになっています。目覚まし時計を叩くアームはサーボモータ2個とソレノイド1個によって構成されます。蓋は蝶番で開閉するようになっており、サーボモータとリンク機構によって開閉させます。
複雑な形状の立体部品は3DプリンタでPLA樹脂の印刷、平面の部品は4mm厚のMDF板をレーザーカッターで加工して次々と作っていきます。

3DプリンタでPLA樹脂の立体部品を印刷。これらを組み合わせてリンク機構(蓋開閉部)を作ります。
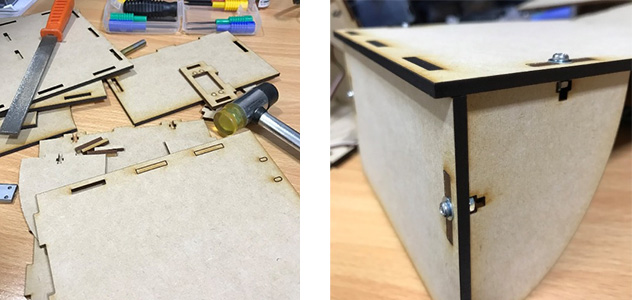
レーザーカッターで加工したMDF板(4mm厚)。接続部に四角い穴を空けて接合します。
MDF板はネジ止めや木工用ボンドなどで接合することが多いです。
部品の加工と組立をひたすら繰り返し…

とりあえず機械の組み立てはおおよそできました。それっぽい形に見えます。
未完成ではあるものの、全体像が見えてくると嬉しくなりますね!
回路の実装
機械の実物の全体像が見えてくると、早く動かしたくてウズウズします。回路を作りましょう。

今回は回路図もろくに書かずに即興ではんだ付けでの実装をしたのですが、できれば回路図はちゃんと書いた方が良いと思います。(説得力がなくてすみません…詳細は記事の最後にある「スペシャルふろく」で確認して下さいね。)

Arduinoやシールドなどのメインの回路は『アトゴフンダケ』の内部に収めますが、人がよく触れたり見たりする電子部品や端子はロボットの外側に出してアクセスしやすいようにします。上の写真では左から順に
- DCジャック(ACアダプタのDCプラグを接続するところ)
- トグルスイッチ(電源のON/OFF)
- LED(電源がONのとき点灯、OFFのとき消灯)
の3つを『アトゴフンダケ』の背面の板に穴をあらかじめ空けた状態にして差し込んでいます。
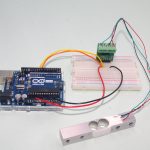
「目覚まし時計が鳴ったら即座に止める」という機能を実装するため、「目覚まし時計が鳴った」という状態を検出する必要があります。そのため、今回は音センサを搭載して目覚まし時計の音を検出し、Arduinoでその信号を監視することにします。
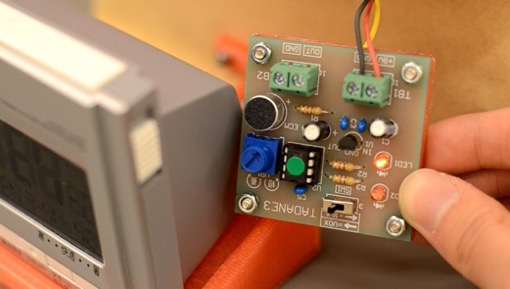
音スイッチキット(秋月電子通商)
今回製作した回路は、
- 音センサは市販のキットをそのまま使用
- Arduino周辺回路など、音センサ以外は自作
という方針で進めましたが、「全部部品単位で買って自作すべき」「市販キットは信頼性があるから率先して使うべき」といったこだわりは特にありません。趣味であれば作る人が好きに方法を選択していいと思います。『アトゴフンダケ』の場合は時間短縮優先で臨機応変(悪く言うと、行き当りばったり)に実装を進めました。
制御プログラム
ついに待ちに待ったプログラム!さあ動かすぞ。
『アトゴフンダケ』のおおまかな動きとしては「アラーム音を検知していないときはアームを体内に収納し、アラーム音を検知するとアームが出てきて、ソレノイドで目覚まし時計のボタンを押す」が基本となります。
サーボモータの角度の設定やソレノイドの動作を細かく設定し、プログラムを実行するとこのように動きます。
いい感じに動きましたね。ボタンを1回押すだけでなく、連打しているところもちょっとしたこだわりポイントです。
前編の記事でご紹介した【ペットのような「かわいい」と感じる動き】をここの動きで表現したいと考え、人間だとアラームが鳴ったときに寝ぼけまなこで無闇にバンバンと手で目覚まし時計を叩くような、アラーム音にちょっとイライラしているような、そんな感情があるかのような動きをここではプログラミングしてみました。
外観デザイン
アイデアを考えるフェーズ(前編)で述べたように【見た目は「キノコ」】と決めて『アトゴフンダケ』という名前にしてしまったので、見た目をキノコっぽくしなければなりません。

外観部分にはフェルトを使うことにしました。『アトゴフンダケ』本体の寸法に合わせて生地を切ります。

『アトゴフンダケ』本体に着せるために裁縫で形を整えます。小学校の家庭科の授業以来の裁縫。玉止めとか返し縫いとかを思い出しながら慣れない作業を頑張りました。

本体に着せてみると配色にキノコっぽさが出てきました。ただこのままではちょっと単調すぎるので…

試しにコピー用紙で水玉模様をつけてみました。それっぽい!
(最終的には水玉模様も白のフェルトを貼り付けています)
ついに完成
できましたあああああああああ!!!

バァーン
よく映画とかで発明家っぽい人が「ついに…ついにやったぞ…!!!フハハハハハ」と高笑いしているときの心境はまさにこの瞬間なのでしょう。世界にひとつだけのキノコ。もともと特別なオンリーワン。前人未踏の大発明を成し遂げました。
全自動二度寝支援装置『アトゴフンダケ』
この発明は時間に束縛され通勤ラッシュに圧迫される現代社会のストレスを抑制し、世界平和のシンボルとして輝き続けることでしょう。 ※諸説あり
あまりの嬉しさに少々テンションが上ってしまいました。申し訳ありませんm(_ _)m
ものづくりは作っている過程は苦しいことも多いですが、完成したときの嬉しさは何ものにも代えがたい、最高にエモいものですよね。
自分の作品があるとそれが名刺代わりになる
Maker Faireなどの展示会に行くと、「あっ、これネットで見たことある!」「すげぇ!」といったたくさんの感動があることはもちろん、そこにはほぼ確実に『作者』がいるというネット上では体験することができない感動があります。
「この作品を作ったの、あなたなんですね!すごいですね!」
「これ作ったんですか!頭おかしいですね(褒め言葉)」
といった気持ちの良い言葉が飛び交います。ものづくりに取り組んでいる人にとって、自分が作ったものを囲んで話している時間は本当に楽しいです。名刺よりも先に作品が出てくることも多い界隈です(笑)
この記事を最後まで読んでくださった皆様とも、ぜひお互いの作品を見せ合いながら楽しくお話しできる日をお待ちしております。ぜひ自慢し合いましょう!
スペシャルふろく
この記事を読んでいただいた皆様に、はんだ付けや配線などの電子工作にチャレンジしていただけるととても嬉しいので、実際に配線した回路の回路図を書き出しました!よかったら参考にしてみてください。

全自動二度寝支援装置『アトゴフンダケ』の回路図
【回路図の補足】
・電源にはACアダプタ(DC9V 2A出力)を使用しています。
・3つの半固定抵抗(VR-ADJ1,VR1,VR2)は本番動作では使いませんが、プログラムの調整中によく使います。サーボモータの角度の調整やセンサのしきい値調整に利用しています。
・音センサ(SENS1)に接続しているのは下記の製品です。VOXモードで使用しています。
秋月電子通商 PIC12F675使用 音スイッチキット[TADANE3]
http://akizukidenshi.com/catalog/g/gK-06758/
今回の連載の流れ
前編:『魅せる』ロボットの作り方
後編:『魅せる』ロボットの作り方(今回)