13時から、各チームはセンサーチェック及びテストランに突入。記者が気になったところ、見ることができたところだけで恐縮だが、速報する。
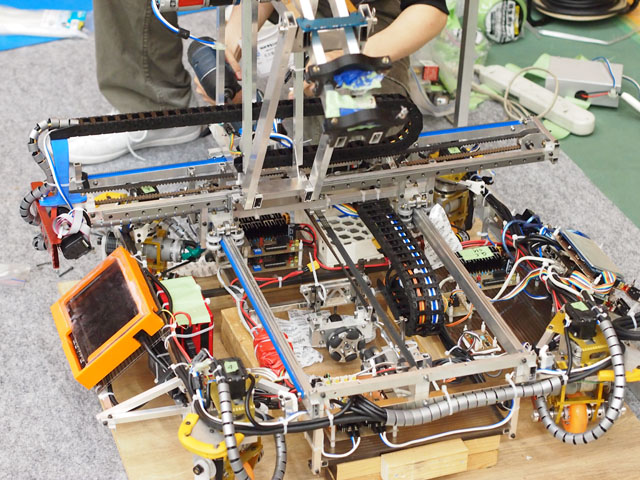
名工大は、すばらしい完成度。人が投げたシャトルへの反応は、ほぼミス無し。綺麗な軌道を描いて、相手コートにシャトルを確実に届けていた。「マジか……」という感嘆の声が、ギャラリーから漏れていた。ラケットはいずれも1本。昨年と同様、オムニホイールは使っていない。ロボットからはずっと電子音が鳴っている。ロボットの移動はほぼ自動で、ラケットを振るタイミングだけを手動で制御している模様(6.7追記:ラケットを振るのも自動で行っているとのこと。お詫びして訂正します)。写真はそのベース部分。
金沢工業。昨年の悔しそうな顔が記憶に新しい。ラケット2本。下から上へのストローク用、そしてその逆、と使い分けている。センサーチェックでは、ラケットを振らず。チームメンバーのバドミントンスキルが高い。そして操縦スキルも高い。
工学院大学。ラケット2本。いずれも下から上。センサーチェックは、純粋にセンサーチェックのみ。シャトルを飛ばすことはなかった。
東京農工大学センサーチェック。センサー用のポールを5本設置。ラケットは多数。モーター駆動による回転式に見える。途中、センサーポールから激しい火花と破裂音。トラブルがあった模様。「コンデンサー?」という声が聞こえてきた。
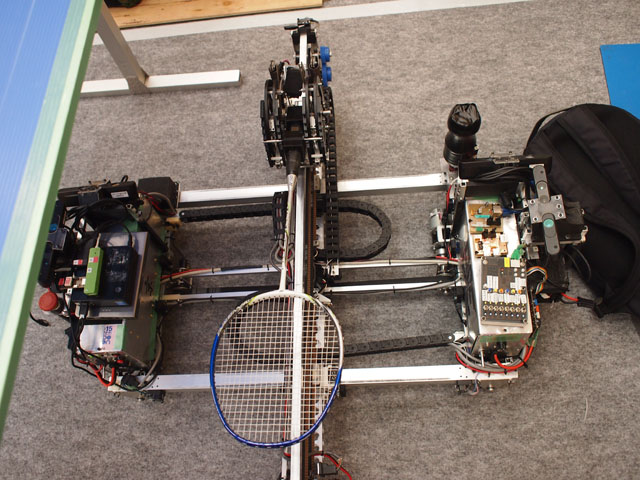
ものつくり大学。ラケット多数+1本。多数側の機体は極めてシンプルで、↓この写真のようにラケットを高く掲げているのみ。

ラケットを振る機構が見当たらない。ただネットの前で左右に動き、「ブロック」する戦術と見た。……たけし……?
九州大学テストラン。塩ビパイプで作られた、重厚なセンサ・タワーを2本用意。自コート左側に2本、いわば直列に並べるカタチ。

コートに上げた機体は1体のみ。サーブ用ラケットは回転式。激しい。一度シャトルを飛ばし、その飛距離をメジャーで測っていた。強弱を設定している模様。
松江高専テストラン。シンプルな機体。サーブは回転式。若干サービスエリアに届かない。細かなサービス距離の調整が続く。その後サービスレシーブ、ラリーのテストに入る。操縦は完全手動に見える。ラケットは変形2本で、1本のシャフトの両端にラケット面を付けたもの。回転式。残り30秒、ロボットがジャンプ! なんと……。高専らしい、そして松江が得意とするジャンプというアイデアで、会場を沸かせた。
豊橋テストラン。おそらく3メートル以上あるセンサ・タワー(6/11追記:正しくは「カメラ・タワー」でした。お詫びして訂正します)を2本用意。

2体のロボットが、完全に同期して動いている。コートを左右に分け、カバーする範囲を明確にする戦略か。コート外に、何か動作する部品を備えた筐体がふたつ。おそらくそれぞれが、タテ or ヨコの操縦を分担している。動作中、けたたましい音。おそらくグリップを高めるためのバキューム。荷重をバネばかりで計っていた。ベース部分と中央タワーの間に、サスペンションを組み込んでいる。モーメント対策か。総じて、かなりの作り込みとアイデア、技術が組み込まれたロボットと感じる。
三重大学テストラン。モーター駆動の鋭いサービス。おそらく操作用の治具を備えている。治具と言うよりは、オリジナルのコントローラと呼ぶべきか。ラケットの高さを調整する機構を備えている。さらには、サービス時専用の位置決めの治具も。
電気通信大学テストラン。多ラケット+2枚直列のサービスロボ。ラケットはモーター駆動で、激しく回転する予感。両コートに1体ずつ配置してテスト。足回りは非オムニ。サービスは優しいタッチ。後半、レシーブの調整も行う。多ラケットを高い位置で保持する機構のためか、移動時の慣性モーメントが大きそうだ。決勝さながらの、ネットに突っ込む勢いのレシーブも見られた。
大阪大学テストラン。ラケットをヨコに構えた1本+多ラケット。多ラケット側は、低い位置で保持している。途中、機体が急に走り出し、慌てて緊急停止スイッチが押される。さらには、高い位置から、直線的に放たれたシャトルが、審判の目の前を通り過ぎるシーンも。
早稲田大学テストラン。1体は高い位置に多ラケット。ブロック戦略か。もう一方、おそらくレシーブ用は低い位置に多ラケット。サービスはほぼ完璧。メンバーはコート上でキビキビと動き、完全にマネジメントされている印象。手動制御組(?)では、ベストの出来か? ふた組にわかれ、ラリー練習を繰り返している。人間とラリーができる完成度。
東京大学テストラン。もっとも早く受付を済ませ、もっとも早くマシン検査を終わらせ、最も早く我々のアンケートに答えてくれた東大。全てが無駄なくマネジメントされている印象。1台はラケット1本。もう一方はタテ+ヨコの2本。黒い1本ロボが、独特の存在感を放っている。凄み、とでも言うべきか。
手で投げたシャトルには、百発百中で相手コートに返していた。しかし、一度ラケットを振ると、また始動前の状態に戻すのが「手動」。……別の意味で、マジか? 何かを割り切った戦略なのか、あるいはトラブルか? サーブは低く、しかし確実にサービスゾーンに届く。そしてタテヨコのラケット、どちらでもサーブでき、「変化」がつけられる。トータルで、相当な実力を感じる。