| 出場回数 | 初出場 |
|---|---|
| チーム名(の意味) | 熊大からくりサークル 由来は分かりません |
| キャプテン名 | 利光正毅さん |
| 出場者名 | 徳永正宏さん、中村南美さん |
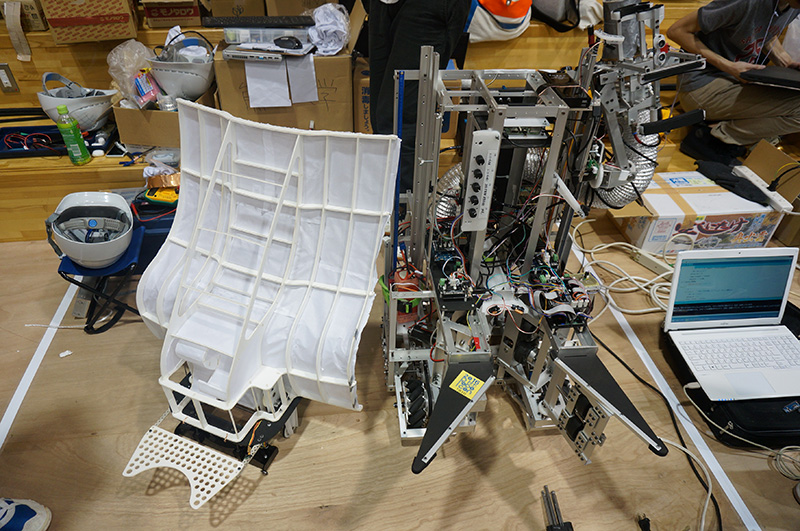
| ロボット名 | エコロボット:KKC-Aero 由来:KKC = 熊大 からくり サークル Aero = より大きな推進力を得られるように空気の流れにこだわったことに由来 ハイブリッドロボット:KKC-Fortress 由来:KKC = 熊大 からくり サークル Fortress = 見た目ががっしりとしていることに由来 |
| ロボットのコンセプト | エコロボット:コンセプト「風をタービンに集める!! 」 設計思想:断面係数を大きく、断面積を小さく!! ハイブリッドロボット:コンセプト「最強の足回りを目指す!!」 設計思想:高剛性!! |
| キーデバイス | メカ:メカナムホイール RS540 (DCモータ) マクソンモータ シリアルサーボ (近藤科学) エアーシリンダ 電気:モータドライバ モータドライバ空冷用のファン ロータリーエンコーダ 超音波センサ Arduino Raspberry-Pi |
| こだわったポイント | エコロボット:駆動軸と連動したタービンに風が集めるような帆を搭載していること。 ハイブリッドロボット:足回り。構造は4輪独立駆動&4輪独立サスペンションであり、ホイールにはメカナムホイールを採用。また、駆動輪とは 別の2つの測定輪からの情報をもとに、駆動輪の回転数を補正し、操作性を向上。 |
| 戦略・必勝パターンは? | エコロボットに絶えず推進力を供給すること |
| ベストスコア・最速タイム | 2分40秒 |
| 他のチームのテストランを見ての感想 | 制御技術の高さ |
| チームのHP等 | http://karakuri.dc.kumamoto-u.ac.jp/ |