
左から、酒井勝海さん、長谷川大樹さん、柴田瞬太朗さん
| 学校名 | 工学院大学 |
|---|---|
| 出場回数 | 10年連続出場 |
| チーム代表者名 | 長谷川大樹さん |
| 出場者名 | 長谷川大樹さん、酒井勝海さん、柴田瞬太朗さん |
| チームのHP等 | http://www.k-r-p.net/ |
| チーム名とその由来 | KRP Kougakuin Robot Projectの略です。 |
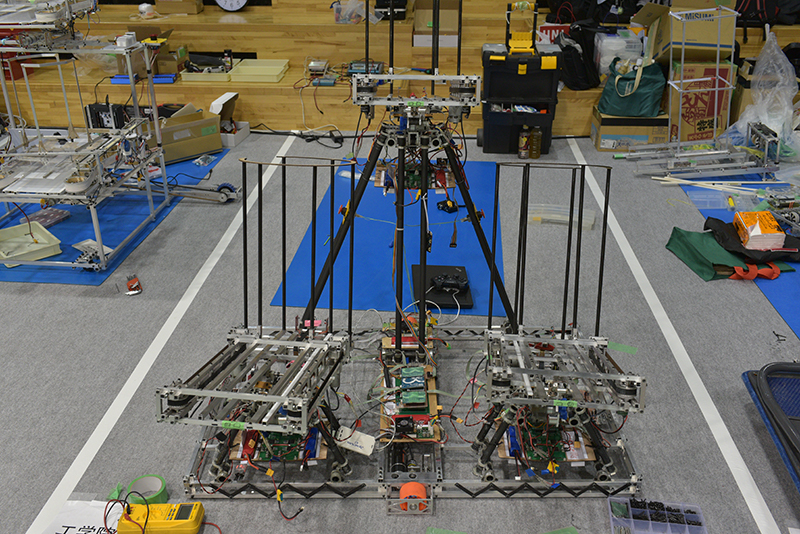
| ロボット名とその由来 | KR17MarkⅣ 由来 工学院大学ロボット2017年製でKR17になり、4回改修を行った為MarkⅣになりました。 |
| ロボットのコンセプト、設計思想 | 中精度のディスクをばらまいて制圧 ディスクの射出精度を高めつつ連射性もたかめる。 |
| こだわったポイント、自慢のポイント | 装填の機構がシンプルで高性能なこと。 足回りのセンサーの位置精度を高くしたこと。 軽量化をして、射出装置を3つ載せたこと |
| 戦略(必勝パターン)は? | 3つの自動制御の射出装置を用いて、それぞれ別々のスポットにディスクをばらまき天晴れを狙う。 |
| 特に重要なデバイス、パーツ | 足回り位置検出用ロータリエンコーダ |






