
最終的な組み合わせ表です。決勝トーナメントは予選リーグでの順位によって入る場所が決まります。
各大学の応援団の皆さんの席は場所が決まっていて、フィールドすぐそばからの応援になります。
シード校の位置は
九州大学 A-2
長岡技術科学大学 B-3
京都大学 C-2
早稲田大学 D-3
新潟大学 E-3
東京大学 F-1
となりました。
シード校がどこに入るかまずは抽選をしていきます。南から順にひくことになりました。

本日のテストランは全て終了し、フィールドの補修が始まりました。
シード校です
東京大学
早稲田大学
新潟大学
長岡技術科学大学
京都大学
九州大学
以上6大学です。


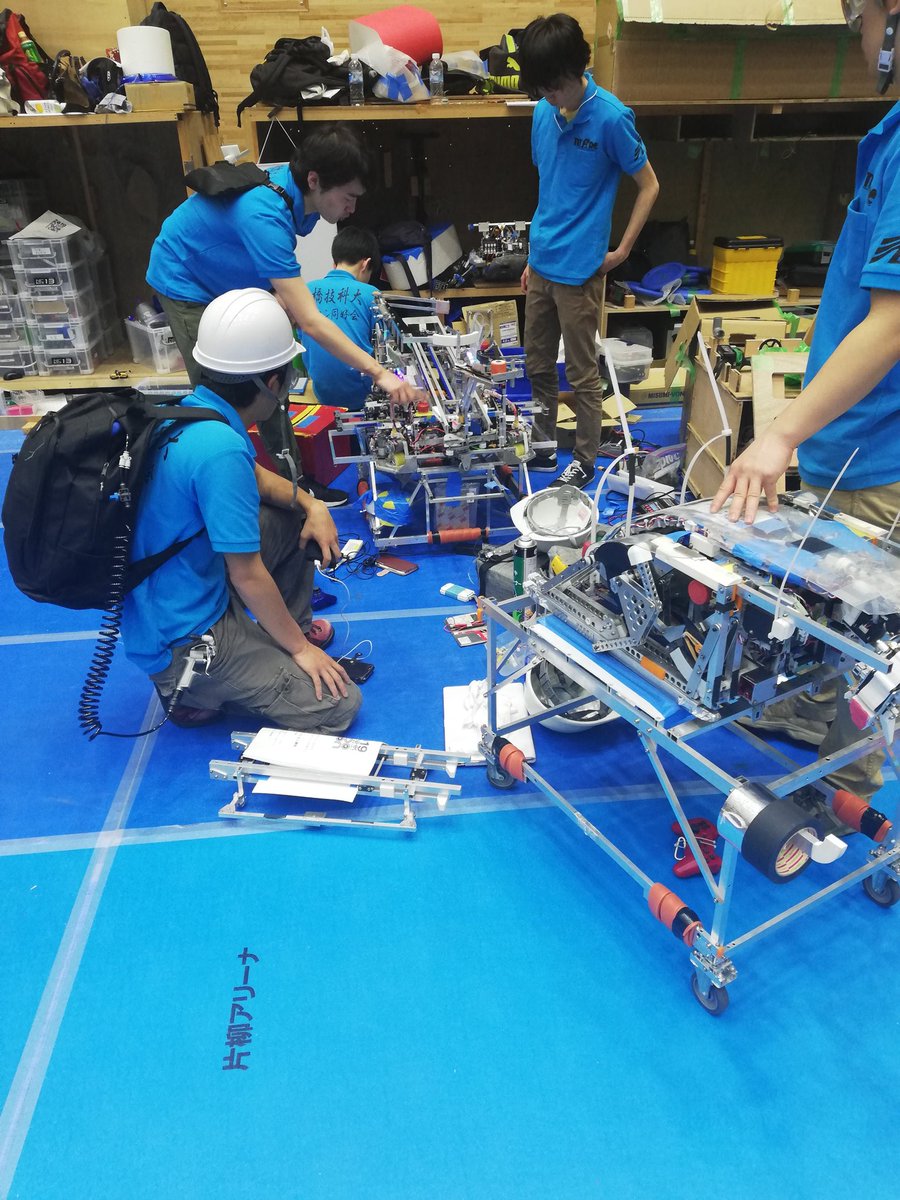
今年は昨年までと異なり、青空柄の天井が印象的な片柳アリーナが会場です。ピットは本番フィールドのすぐ裏側で同じ部屋です。
対戦形式のテストランは終了です。これから抽選が行われ、チームリーダー会議は予定通り19時から行われます。
対戦形式のテストラン2試合目は赤ゾーン早稲田大学対青ゾーン長岡技術科学大学です。
九州大学 対 東京大学の試合は東京大学がゲルゲの受け渡しに失敗しましたがリトライで立て直し2分4秒でウーハイを達成して勝利しました。九州大学はMR2が砂丘で苦戦していました。

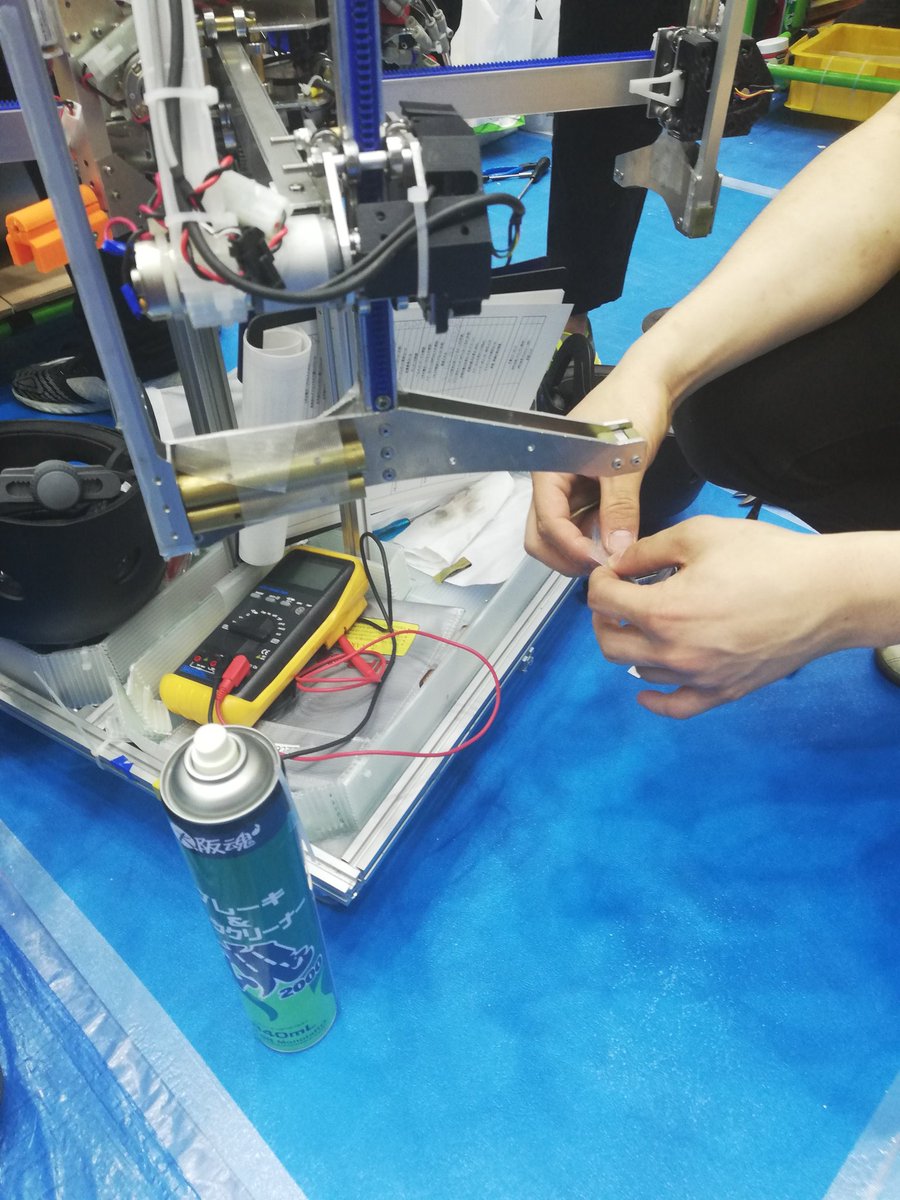
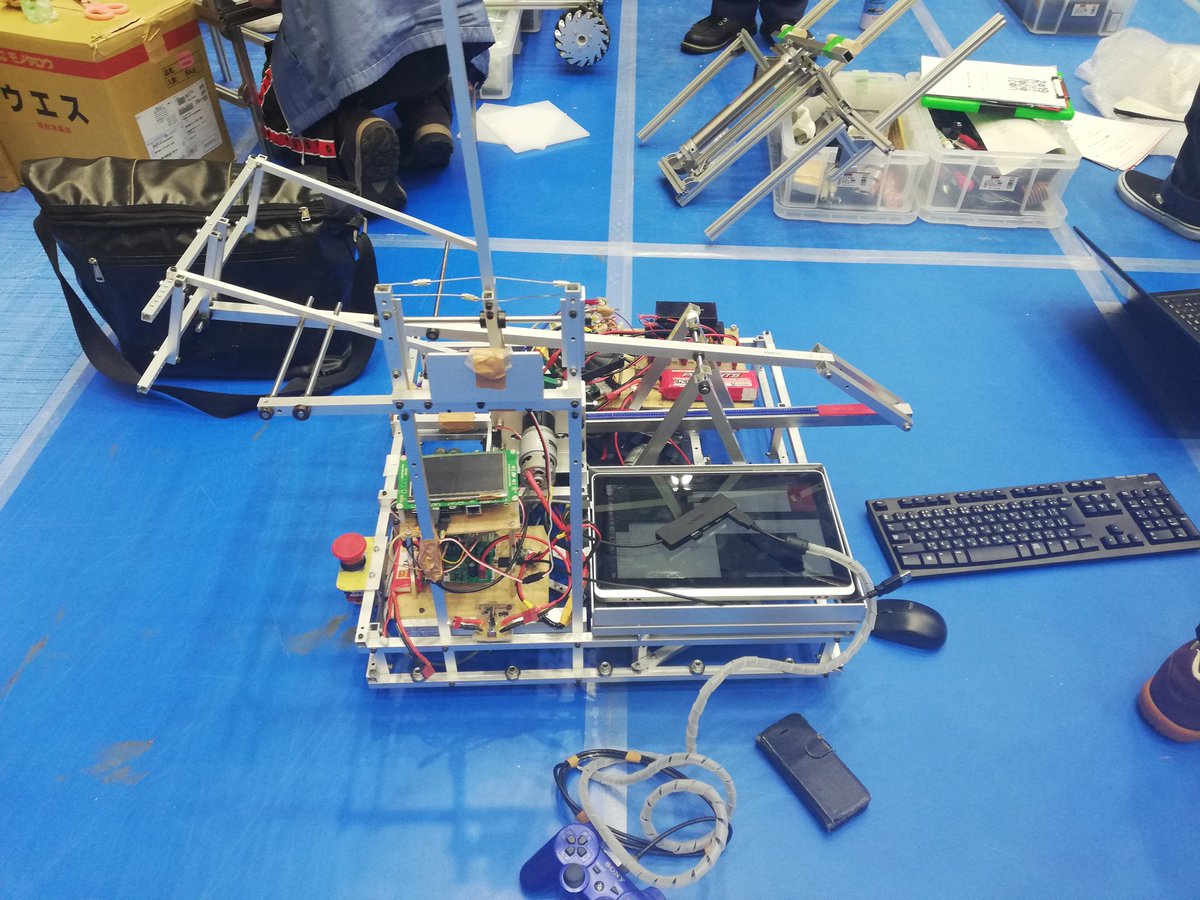
東京工科大学 プロジェクトRはMR2の足の清掃にパーツクリーナーを使っているようです。足裏についているのはアメゴムとのことです。

選手やカメラの位置の確認が行われています。
対戦形式テストラン1試合目は赤ゾーン九州大学対青ゾーン東京大学です。
まもなく対戦形式のテストランが始まります。

青ゾーンでは先程東京工業大学のMR1が衝突した部分の補修が行われています。
青ゾーン付近で焦げ臭いにおいがしました。直前には東京工業大学のロボット審査が行われていましたが大丈夫なのでしょうか。心配です。

ピットには消火の為の道具が用意されています。安全第一です

青ゾーンでは傷んだテープの補修が行われました。

動力に使う圧縮空気のためのコンプレッサです。安全のためにピットから少し離れたところに各チームのコンプレッサが並んでいて、試合や調整のたびにここでロボットに空気を補充します。
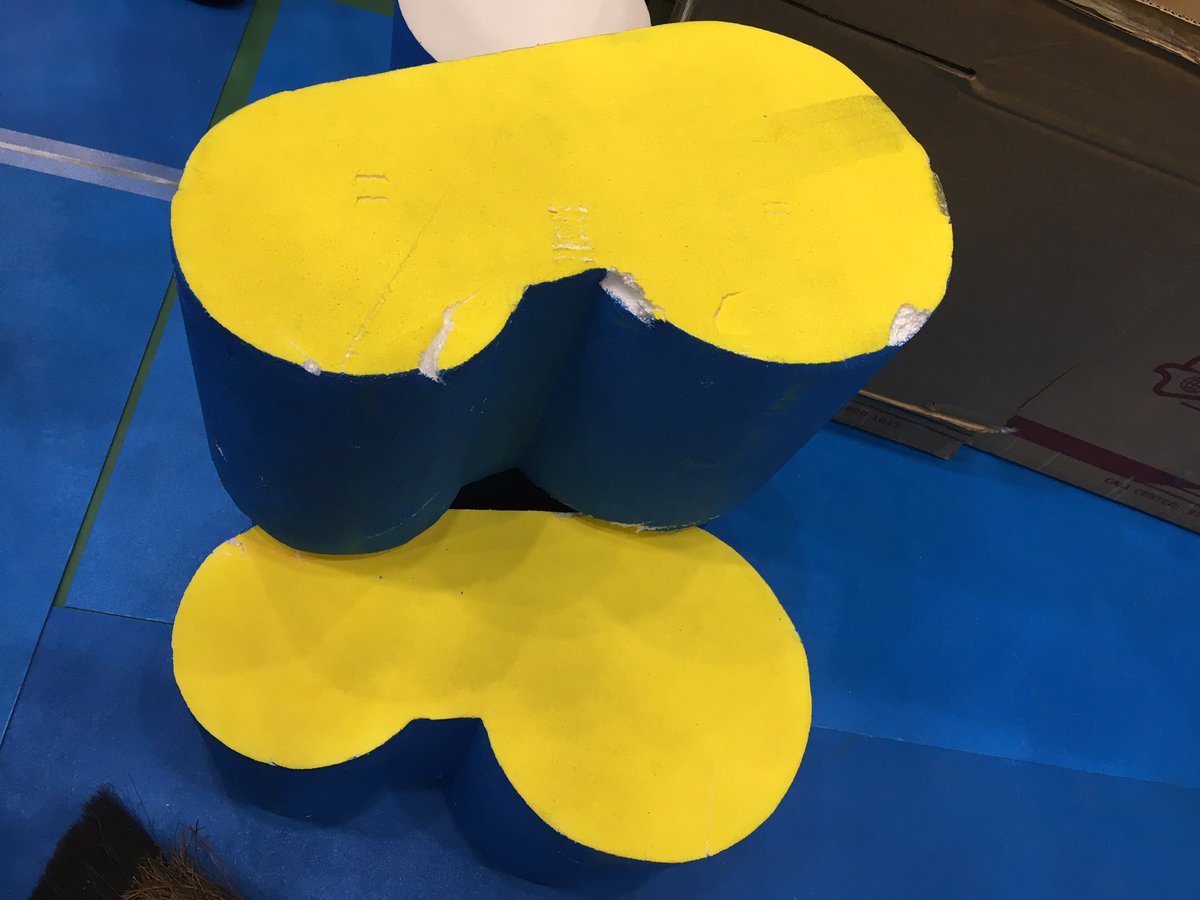
テストランで使い込まれたシャガイです。使われるたびに削れていっているようです。


赤ゾーンで豊橋技術科学大学がロボット調整しました。ロープが規定よりも硬いのではないかということで確認をしていました。

裏手にはアートチームの資材があります。万一フィールドが壊れてしまった場合などに備えています。また、選手たちに大会の様子がわかるようにディスプレイが用意されています。
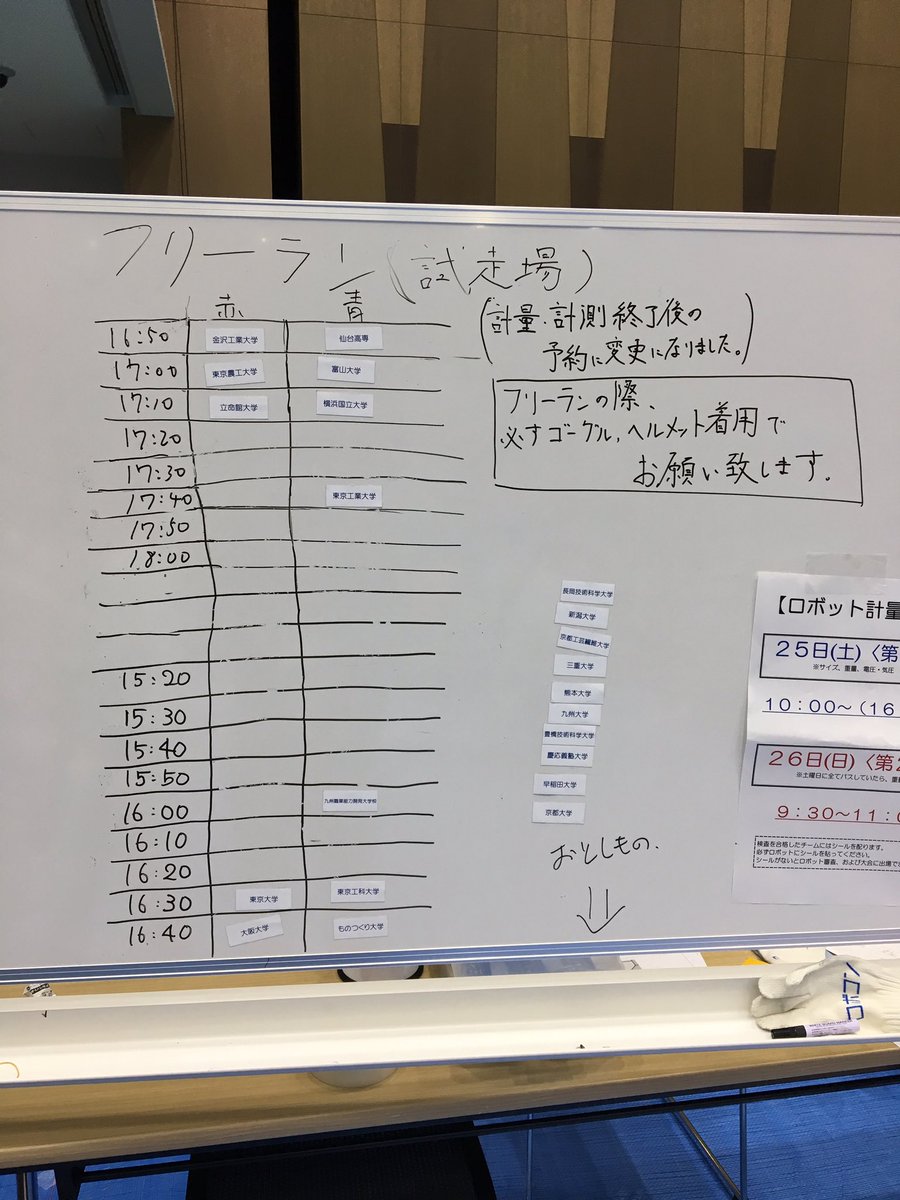
今後の試走場の予定です。ピット内にある試走場はマグネットで予約する方式です。

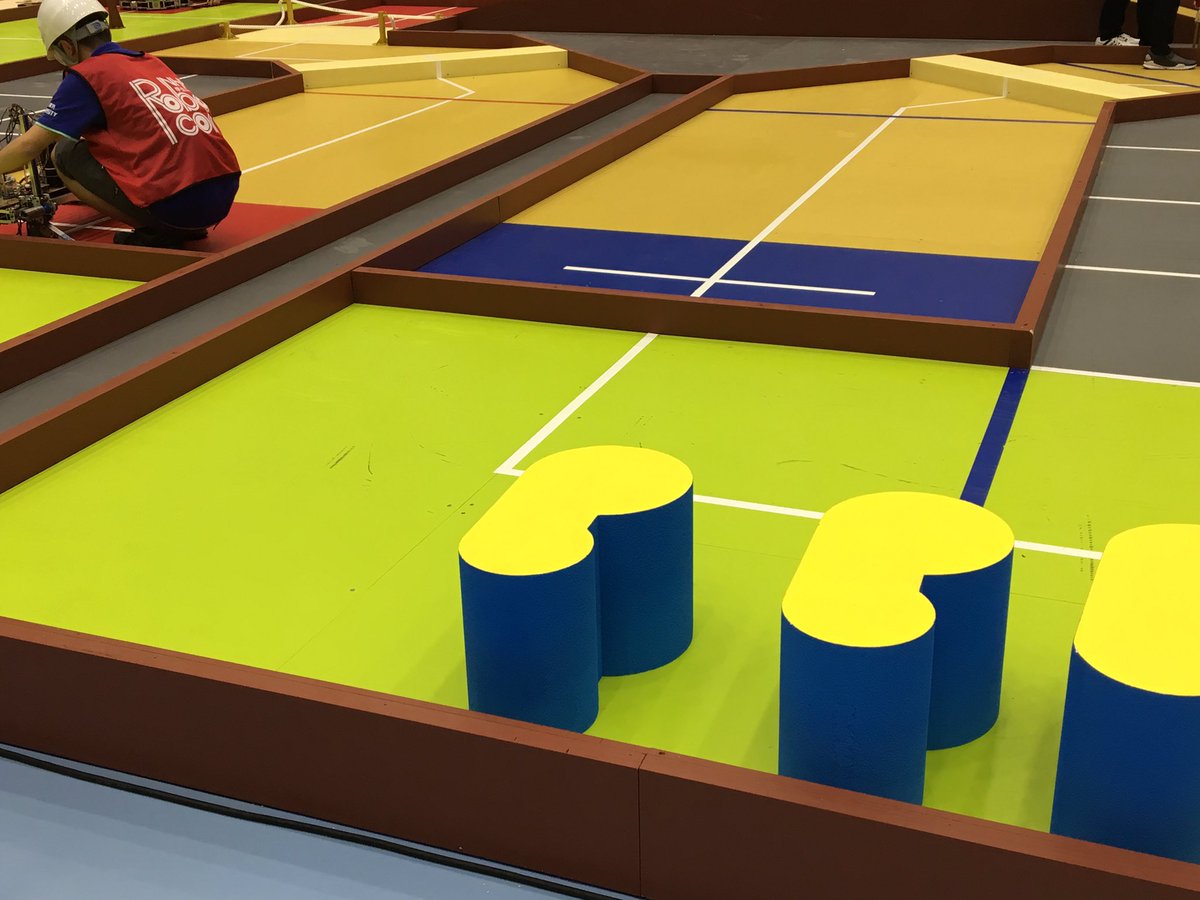
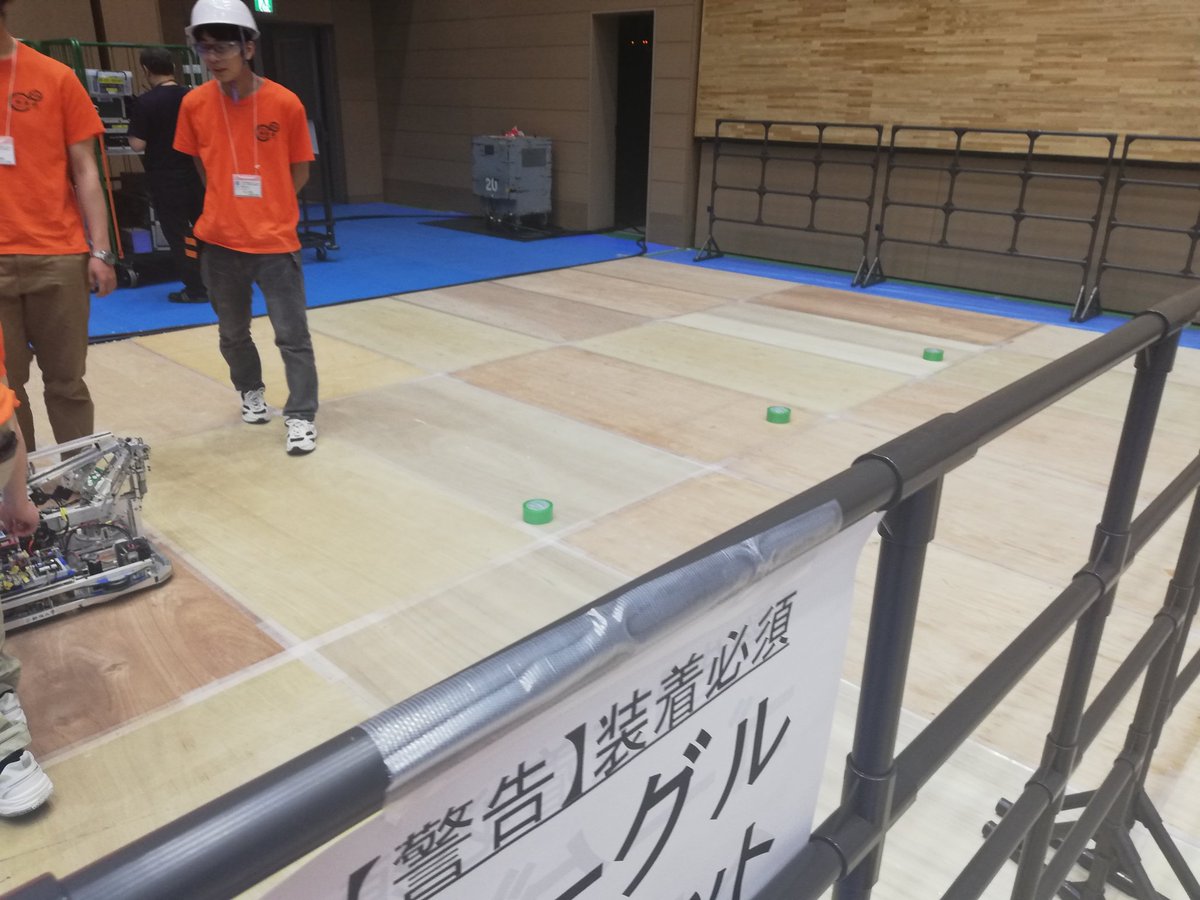
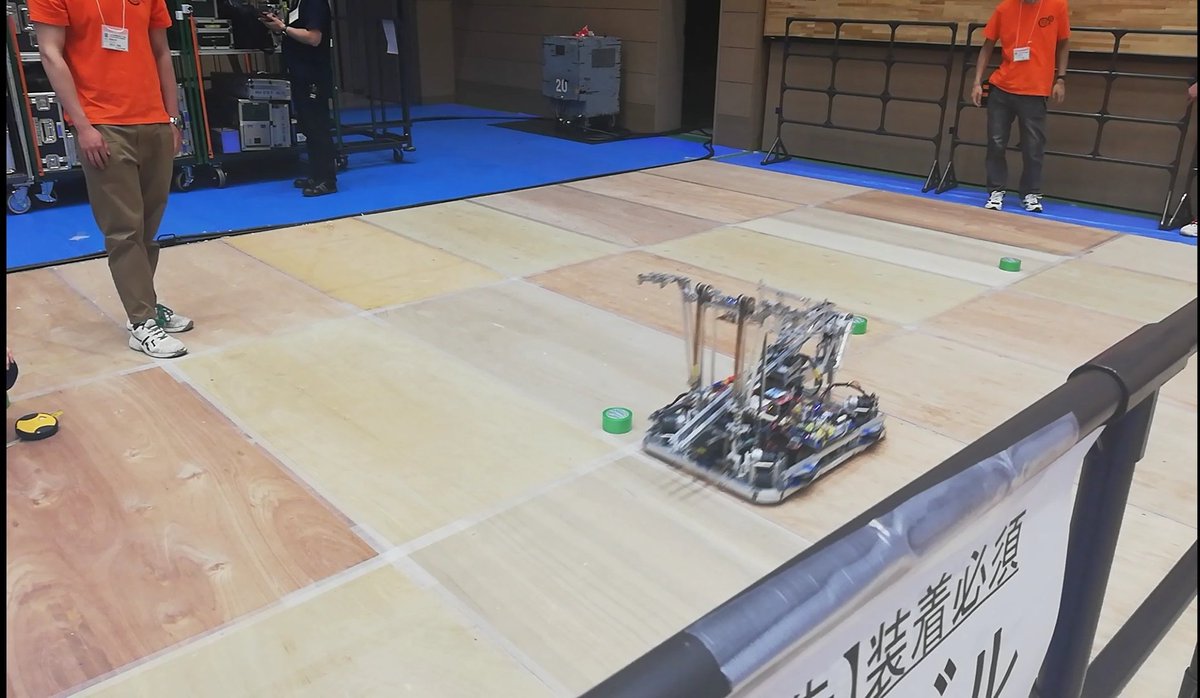
激しくロボットが走り回るとどうしてもフィールドは削れていってしまいます。今年のフィールドは木製のため、削れてしまった部分は削れたままで大会が行われるそうです。

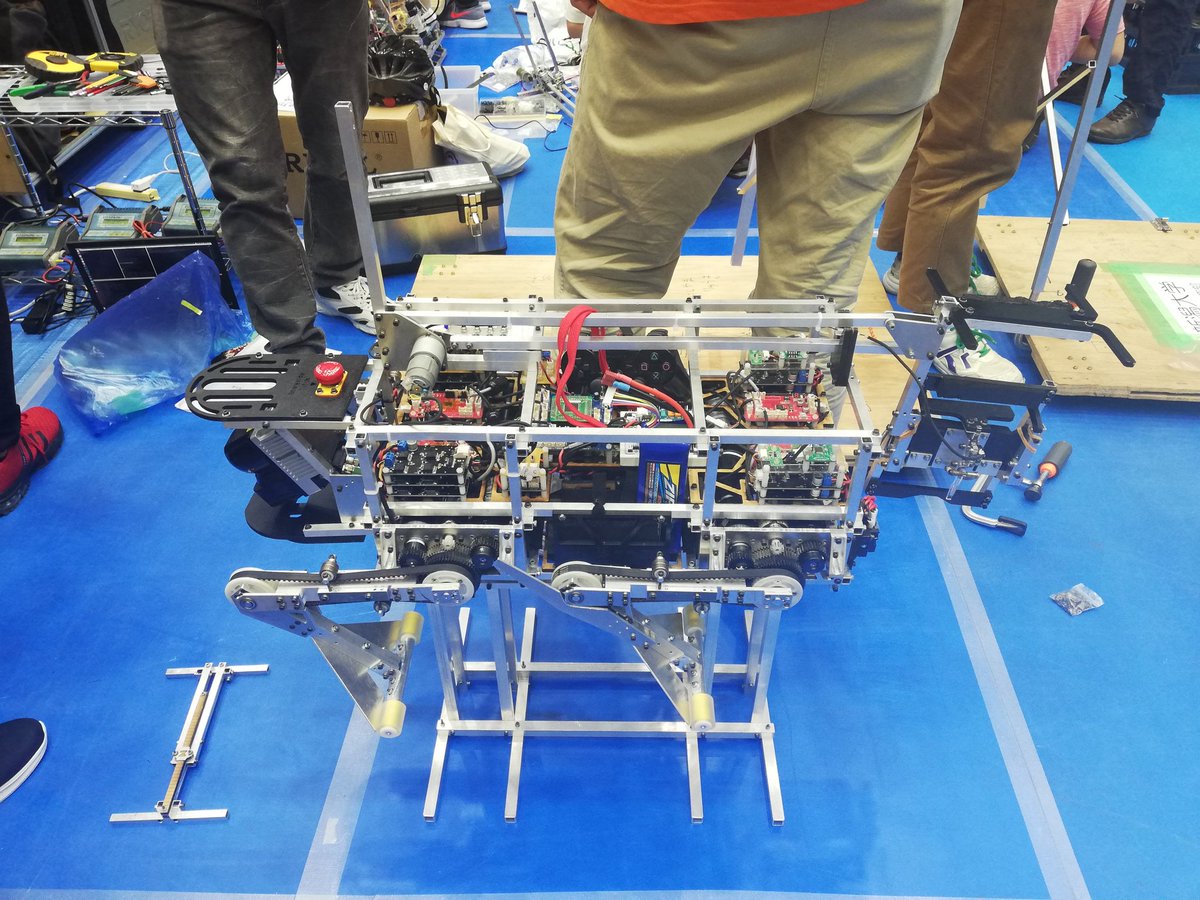
細長い脚を持つ点で似ている東京大学、東京工業大学、新潟大学ですが、他2校がタイミングベルトで膝を動かしているのに対し東京工業大学はリンク機構を使っています。

剥がれたラインテープは適宜修正されています。毎回丁寧に糊で貼り直しています。

赤ゾーンで東京大学がロボット調整をしました。MR2の転倒に備えてロープを繋いだ状態でテストランをしています。MR2が何度もロープに引っかかっていました。
青ゾーンではこれからロボット審査が行われます。それに向けてフィールドの調整や清掃、シャガイの交換が行われています。
赤ゾーンはロボット審査が終了したので審査が終了したチームのロボット調整に使われます。

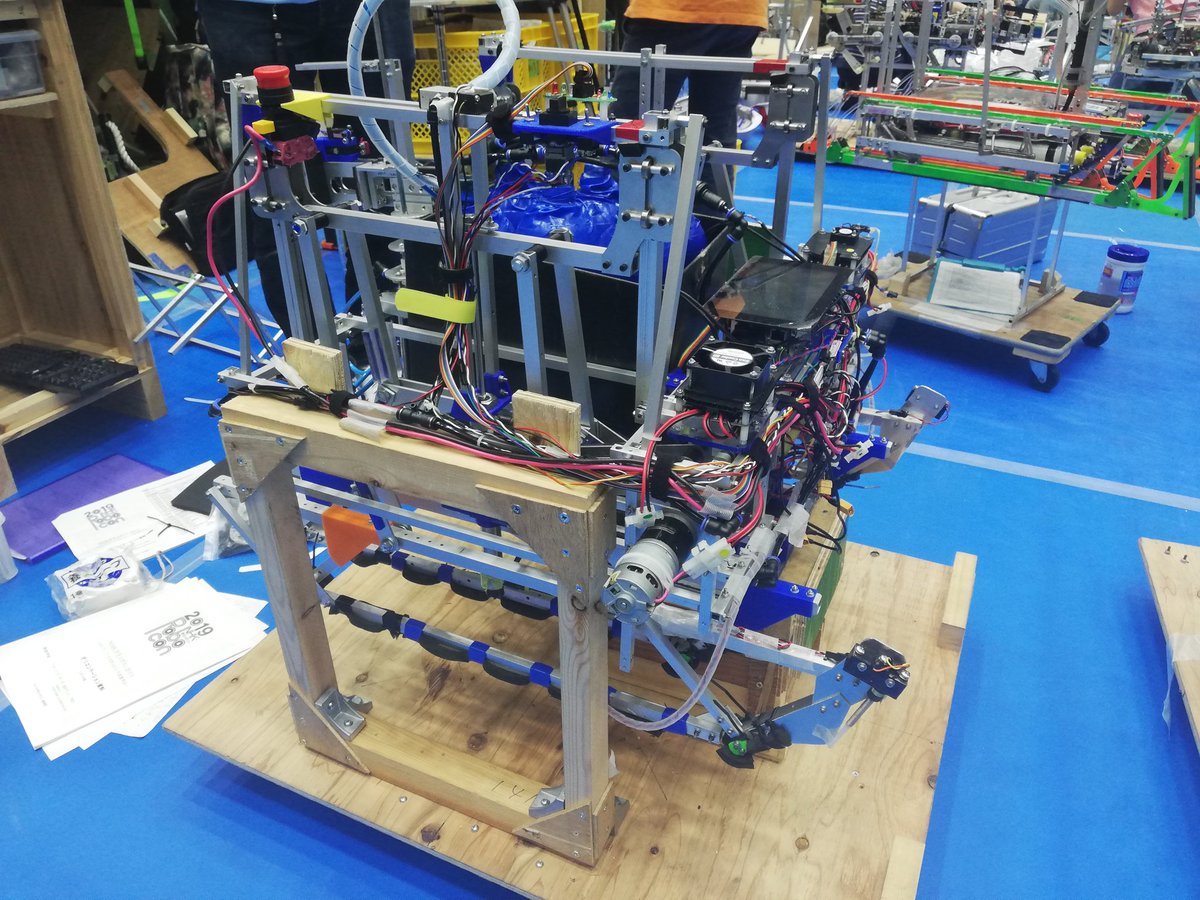
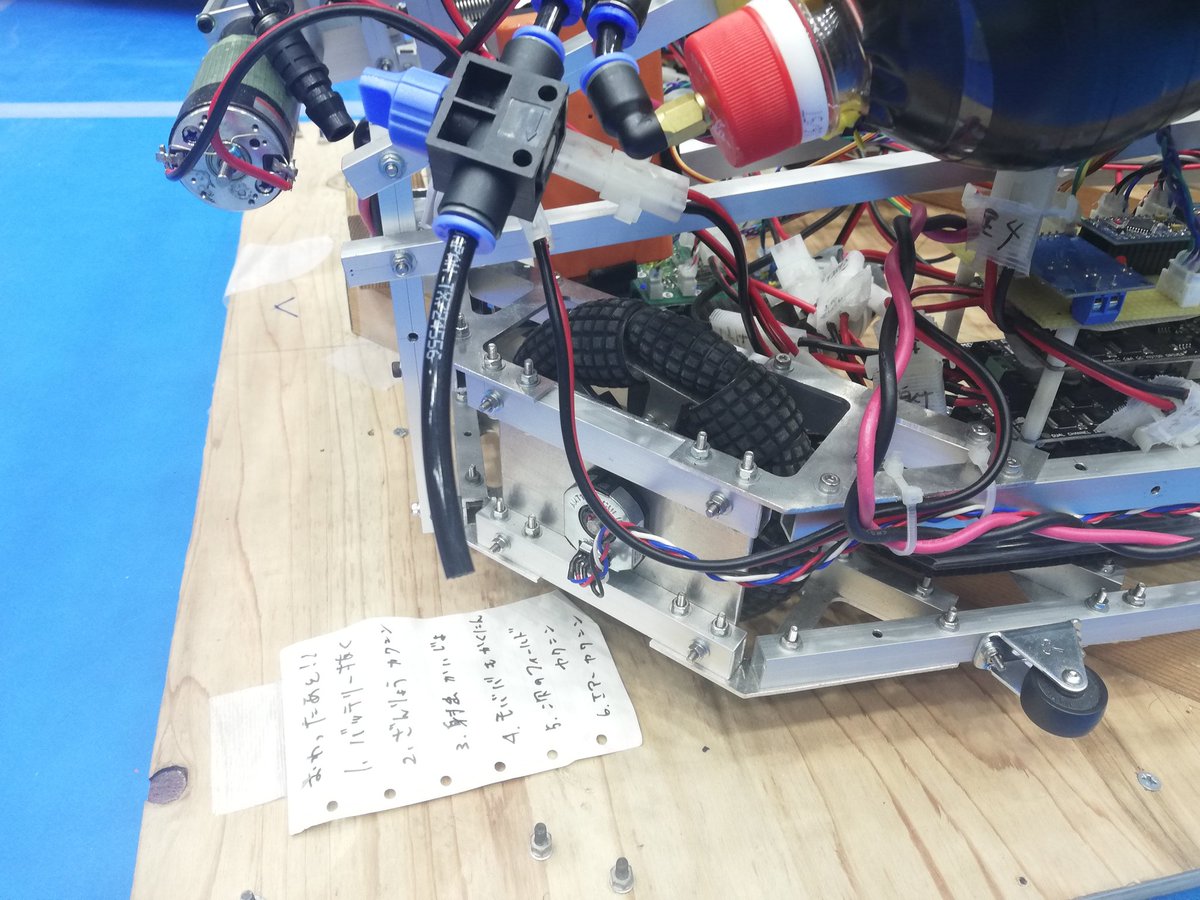
横浜国立大学 Robo+ism、塗装したベニヤ板を試走場に敷くことで本番フィールド環境に近づける工夫をしています。MR2はロープがロボット内を通過できる機構を持っているようです。
赤ゾーンで金沢工業大学のロボット審査が行われました。ゲルゲの受け渡しに失敗してしまい、タイムアップしました。
青ゾーンで長岡技術科学大学のロボット調整が行われました。MR1は勢いよく走りますが、勢い余ってゲルゲの受け渡しに失敗してしまうようでしたが、修正されつつあるようです。
赤ゾーンで大阪大学のロボット審査が行われました。MR2がロープを踏んで転倒してしまいタイムアップしましたが、ウーハイまでひと通りの動作ができることを示しました。
青ゾーンで早稲田大学のロボット調整が行われました。相変わらず勢い良く投げたシャガイが相手チームのゾーンに飛び込んでしまいました。本番では失格になってしまうので修正を間に合わせたいところです。
赤ゾーンで仙台高等専門学校のロボット審査が行われました。MR2が砂丘に苦戦してタイムアップしました。
青ゾーンでは豊橋技術科学大学のロボット調整が行われました。24秒ほどでのウーハイを繰り返していました。
東京大学 RoboTechのピットではハンドの組み換えが行われていました。今年のルールは赤・青フィールドが線対称なので、試合時のフィールドによって機構を組み替えるチームもあります。
青ゾーンでは九州大学のロボット調整が行われました。MR2がリズム良く進んでいました。
赤ゾーンで京都大学のロボット審査が行われました。MR2はロープに引っかかっり動力の空気が抜けてしまうトラブルがありましたが、ひと通りの動きができることをアピールしました。
青ゾーンで三重大学がロボット調整を行いました。大きく伸びるMR1で連続して馬を出していました。

立命館大学 RRST、MR2の機体を浮かせた状態で脚の動きを入念にチェックしています。
豊橋技術科学大学 とよはし☆ロボコンズ、ロボットの動作チェックを進めています。MR1から足回りモータが動いている音が確認できます。引き続き調整頑張ってください!
赤ゾーンで長岡技術科学大学のロボット審査が行われました。MR1が森の中でゲルゲを落としたりMR2がリトライしたりしましたが1分45秒でウーハイしました。
赤ゾーンでは京都工芸繊維大学のロボット審査が行われました。ゲルゲの受け渡しやシャガイの投擲に苦戦してタイムアップしました。
金沢工業大学 蹄翔、MR1の白樽オムニホイールをテープで拭いています。タイヤが滑らないためにホコリをとっているようです。
青ゾーンで東京大学がロボット調整を行いました。ひと通りの動作確認を取った後各部の動作を繰り返し練習していました。
新潟大学 科学技術研究部、試走場にて養生テープを使った森エリア通過のテストをしていました。
赤ゾーンでは早稲田大学のロボット審査が行われました。MR1がゲルゲを落としてしまったりMR2がウーハイゾーンに入りきる前に停止してしまったりといった不具合もありましたが、ひと通りの動作を見せることができました。

青ゾーンではものつくり大学のロボット調整が行われました。MR1 MR2それぞれ入念に調整していました。
赤ゾーンでは九州大学のロボット審査が行われました。MR2がロープに引っかかりリトライしましたが、およそ2分でウーハイしました。
赤ゾーンでは三重大学のロボット審査が行われました。ゲルゲの受け渡しとロープ越えに失敗しましたが、それ以外ひと通りの動作ができることを見せて時間終了しました。
赤ゾーンでは豊橋技術科学大学のロボット審査が行われました。MR1が走り出せないトラブルが発生し、MR2も最後まで完走できないまま終了してしまいました。早速回路を見ながら原因究明が行われていました。
赤ゾーンでは東京大学のロボット審査が行われました。手元の計測では24秒でウーハイしました。その後も繰り返し動作させて調整をしていました。
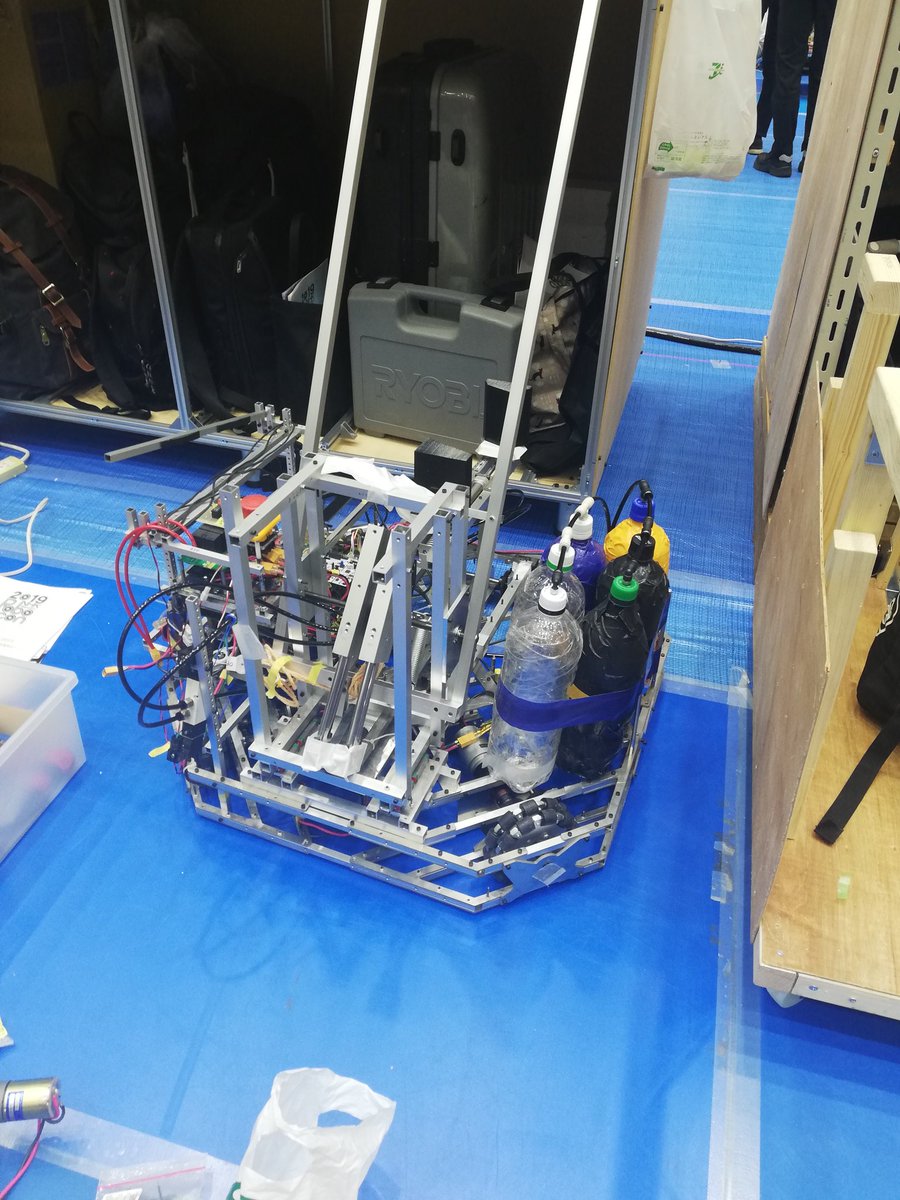
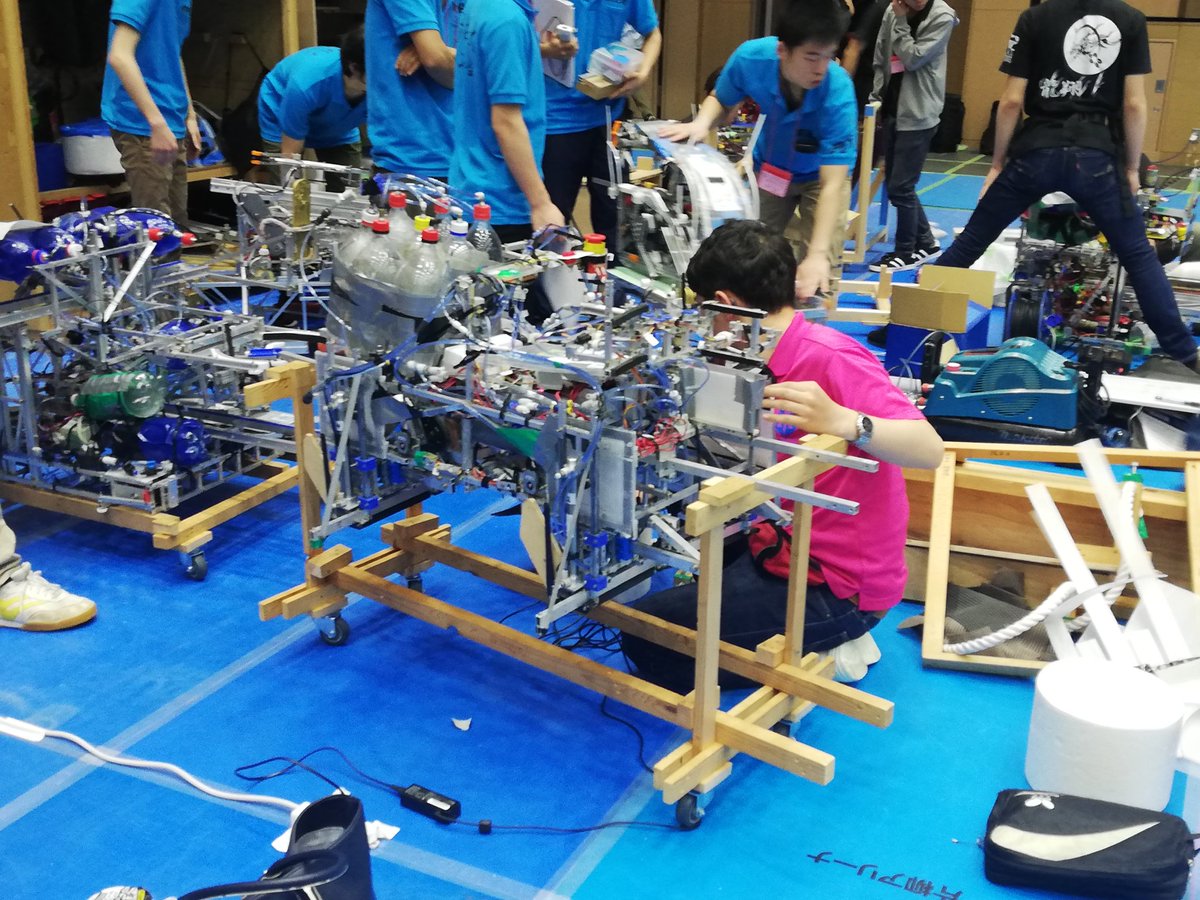
東京工業大学 Maquinista、軽量化の方法について伺ったところ、余裕を持って搭載していたエアタンクを減らしたとのことです。リトライをしてエアが足りなくなった場合はメンバーが持つリュックのタンクからエアを補充するそうです。
まもなくロボット審査が始まります。

青ゾーンでは慶應義塾大学のロボット調整が行われました。MR1はヤギの姿勢にセッティングしたシャガイを挟んで持ち上げるようです。12自由度を持つ蜘蛛のような見た目のMR2は着実な歩みで進んでいました。

ものつくり大学 イエロージャケッツ、MR2が組みたっていました。脚に計量通過のシールを貼り付けているところでした。

青ゾーンでは東京農工大学のロボット調整が行われました。ブラシレスモータの力で飛び跳ねるMR2は着地した時にこけてしまう場面もありましたが、調整がされたようです。MR1も大きな音を立てながら走っていました。
赤ゾーンでのロボット調整は全て終了しました。フィールドの調整が終わってからロボット審査(シード校決め)が行われます。
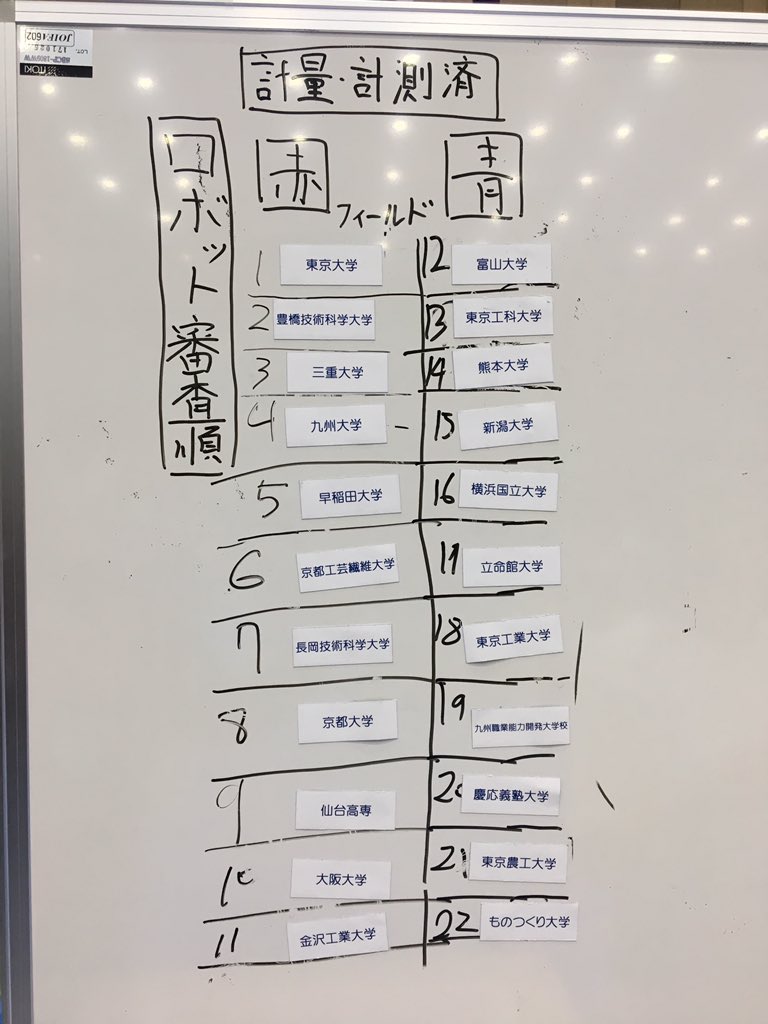
ロボット審査は計量通過順に行われます。

赤ゾーンでは金沢工業大学のロボット調整が行われました。ゲルゲの受け渡しの調整を入念に行なっていました。
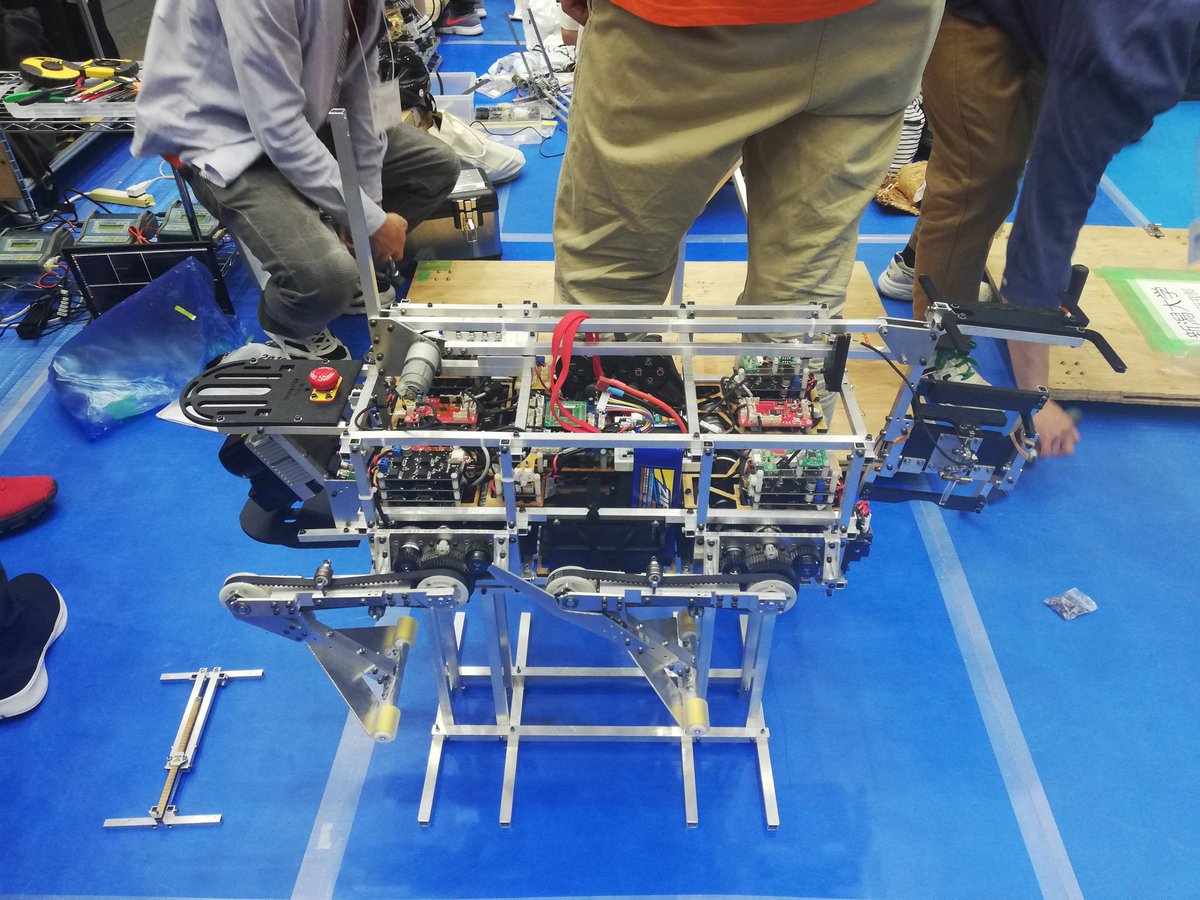
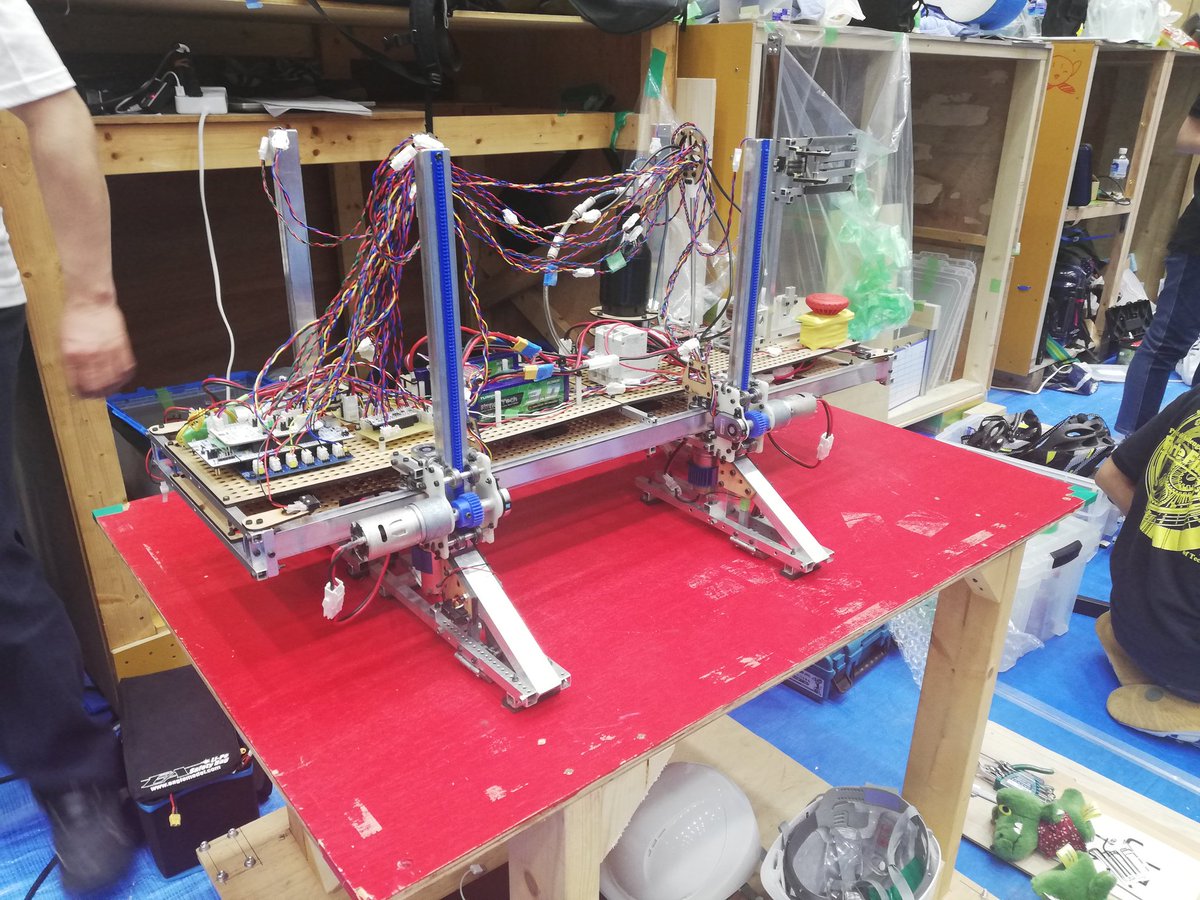
東京農工大学 R.U.RのMR1、MR2です。MR2の脚はブラシレスモータ駆動で、一気に脚を出してジャンプします。

青ゾーンでは東京工業大学のロボット調整が行われました。減量に成功し計量を通過できたようです。MR1は森で衝突してしまう場面が見られましたが、頭のついた馬のような見た目のMR2は歩行している姿が見られました。

赤ゾーンでは大阪大学のロボット調整が行われました。MR1は何度もシャガイを投げ、MR2はロープを超える調整を繰り返していました。MR2が転倒する場面もありましたが、調整は続行していました。

青ゾーンでは九州職業能力開発大学校のロボット調整が行われました。MR2のリンク機構の足が特徴です。

赤ゾーンでは仙台高等専門学校のロボット調整が行われました。シャガイを何度も投げて調整していました。

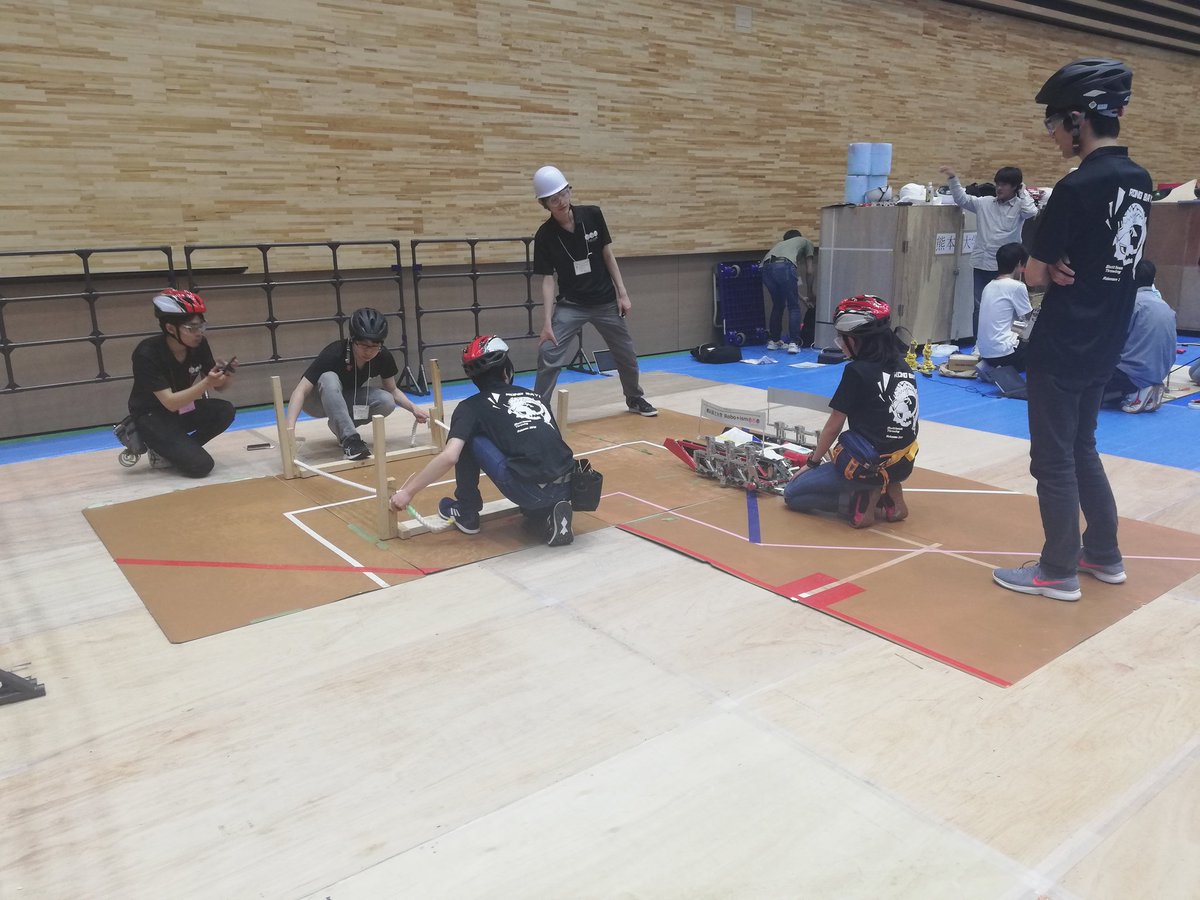
三重大学 M3RC、試走場にて持参したロープと角材を使ってMR2の動作テストを行っていました。
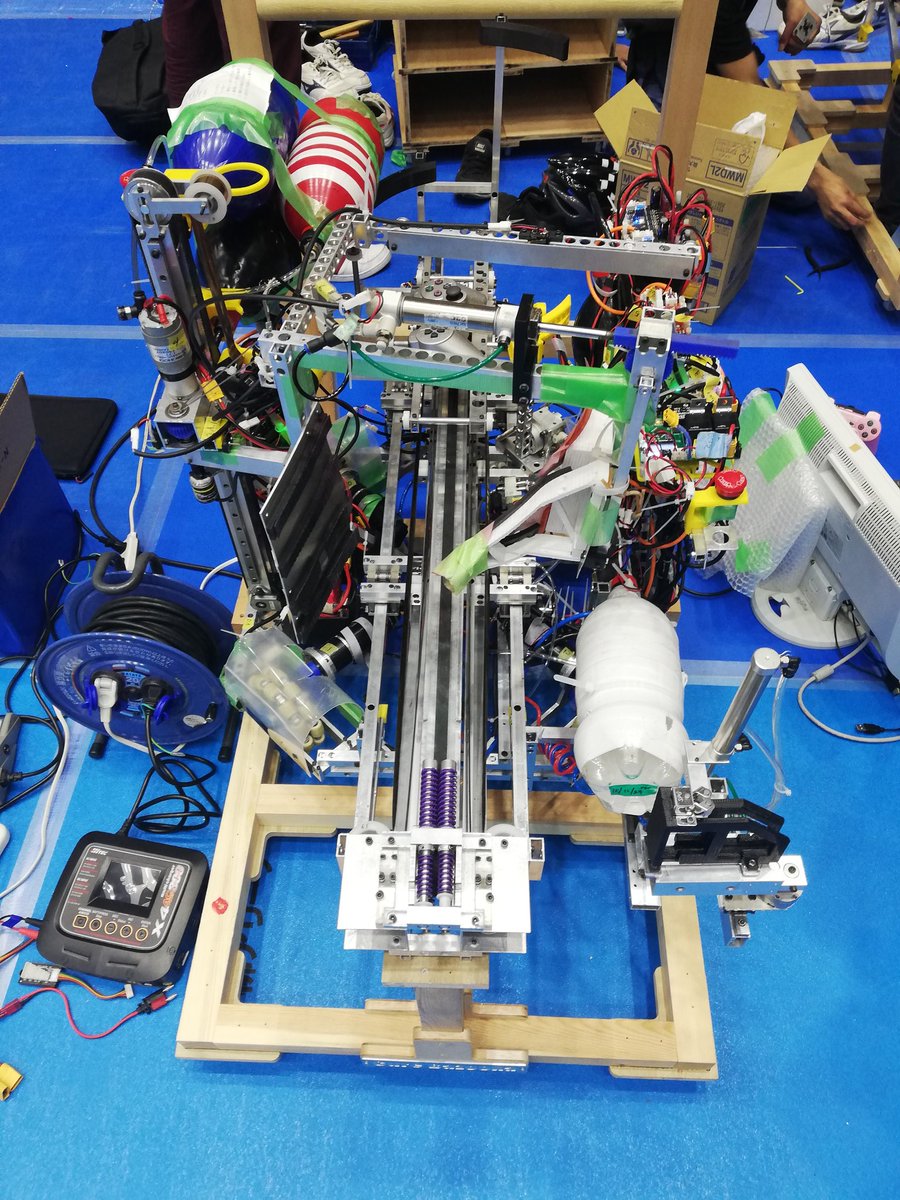
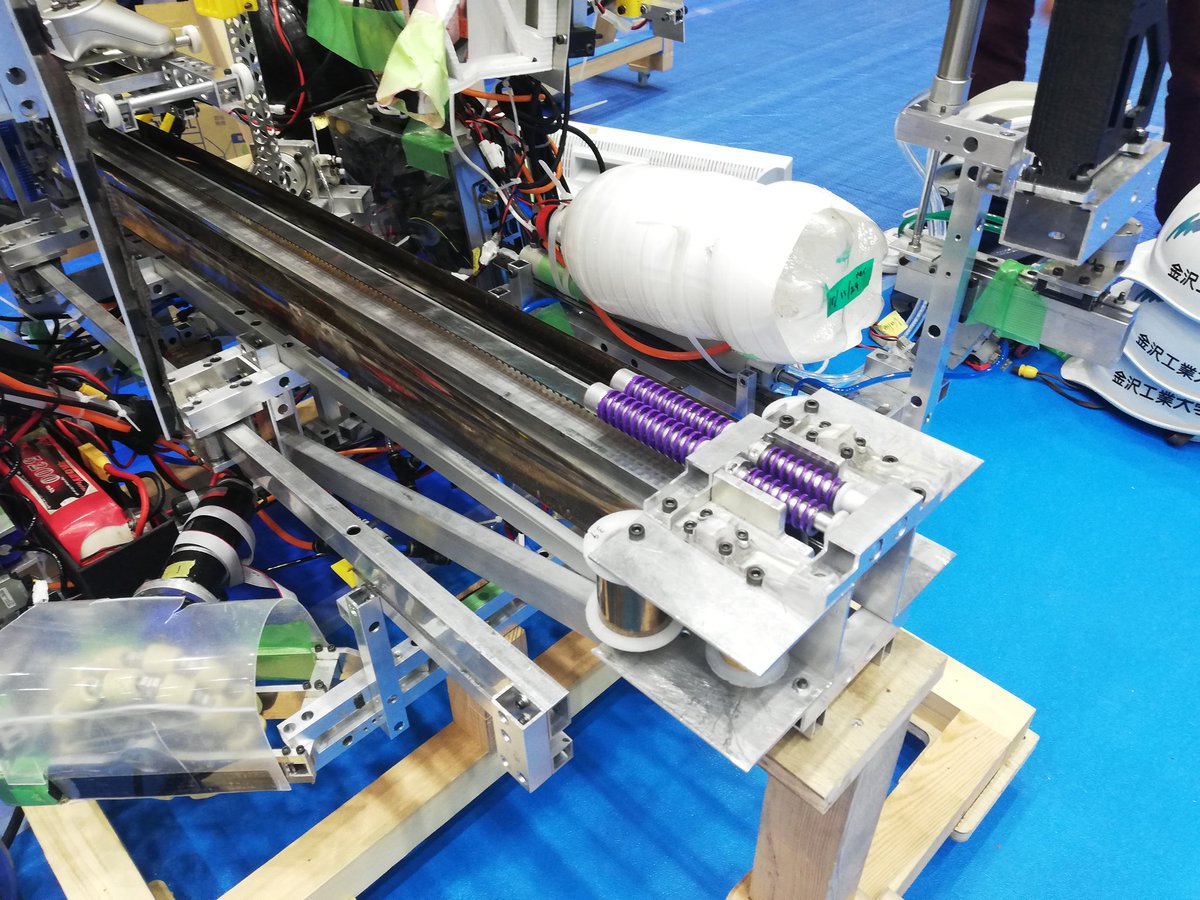
京都大学 機械研究会のMR1、MR2です。MR2のシャガイを投げる長めのエアシリンダは自作とのことです。

赤ゾーンでは九州大学のロボット調整が行われました。MR1が滑らかに進み、馬を出していました。MR2がロープに引っかからないように歩き方を工夫しているようです。
大阪大学 RobohanのMR1、MR2です。MR1にはシャガイ投げに使うという大きなバネが見えます。
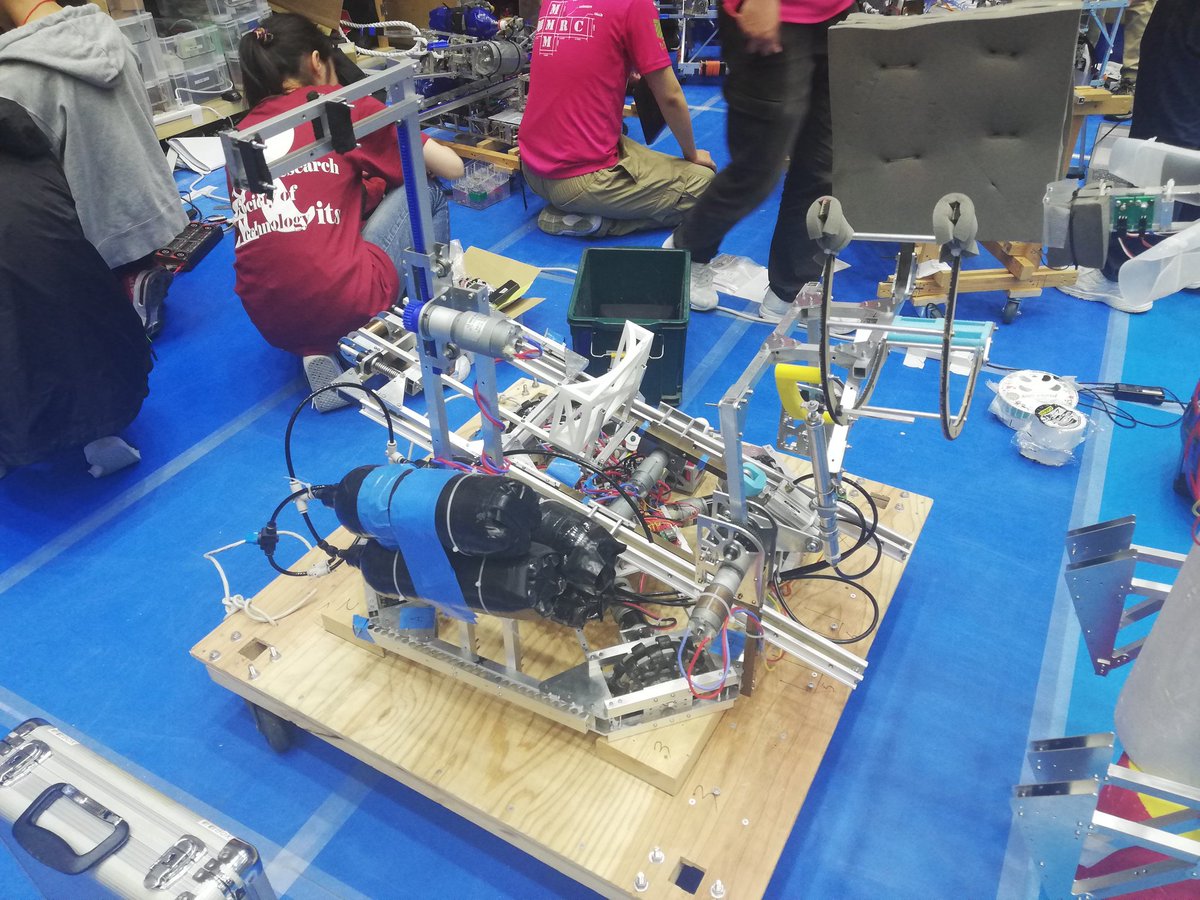

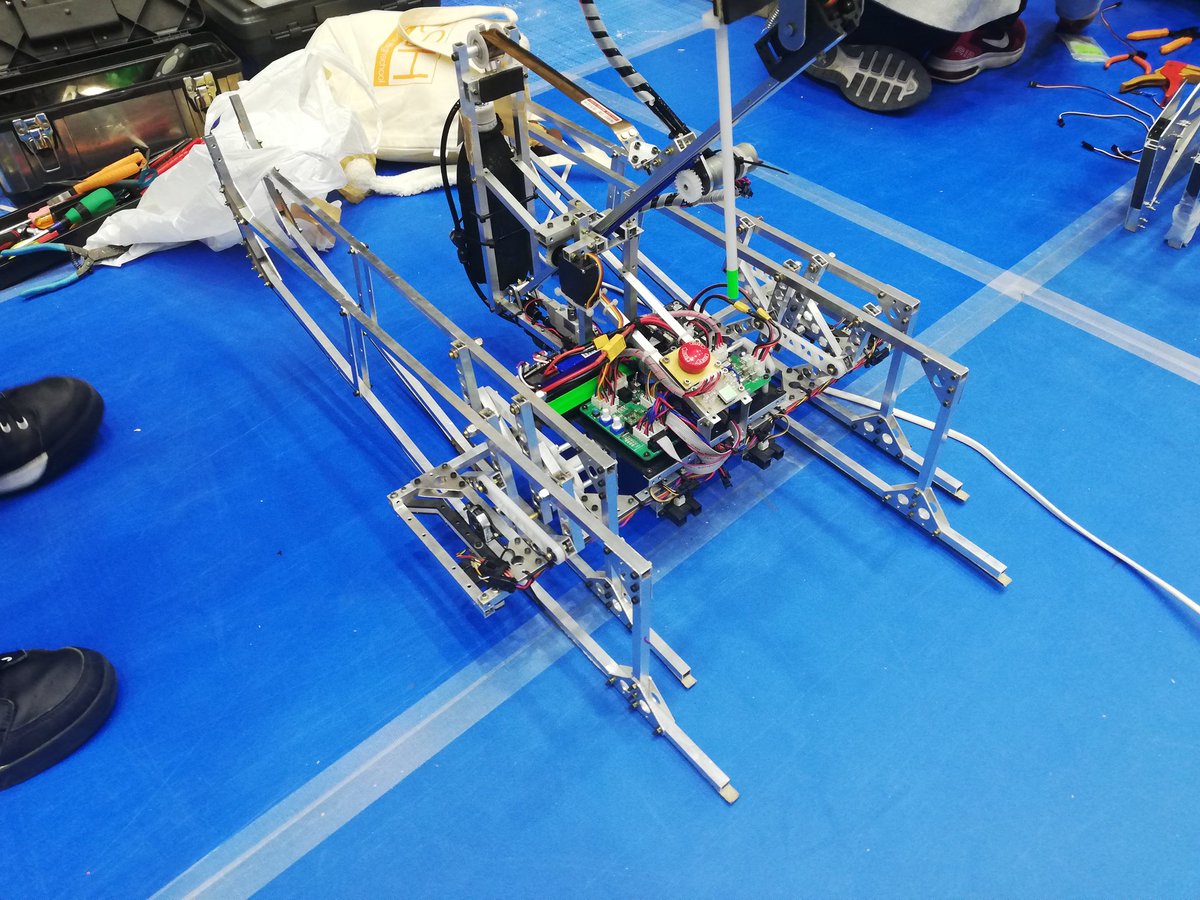
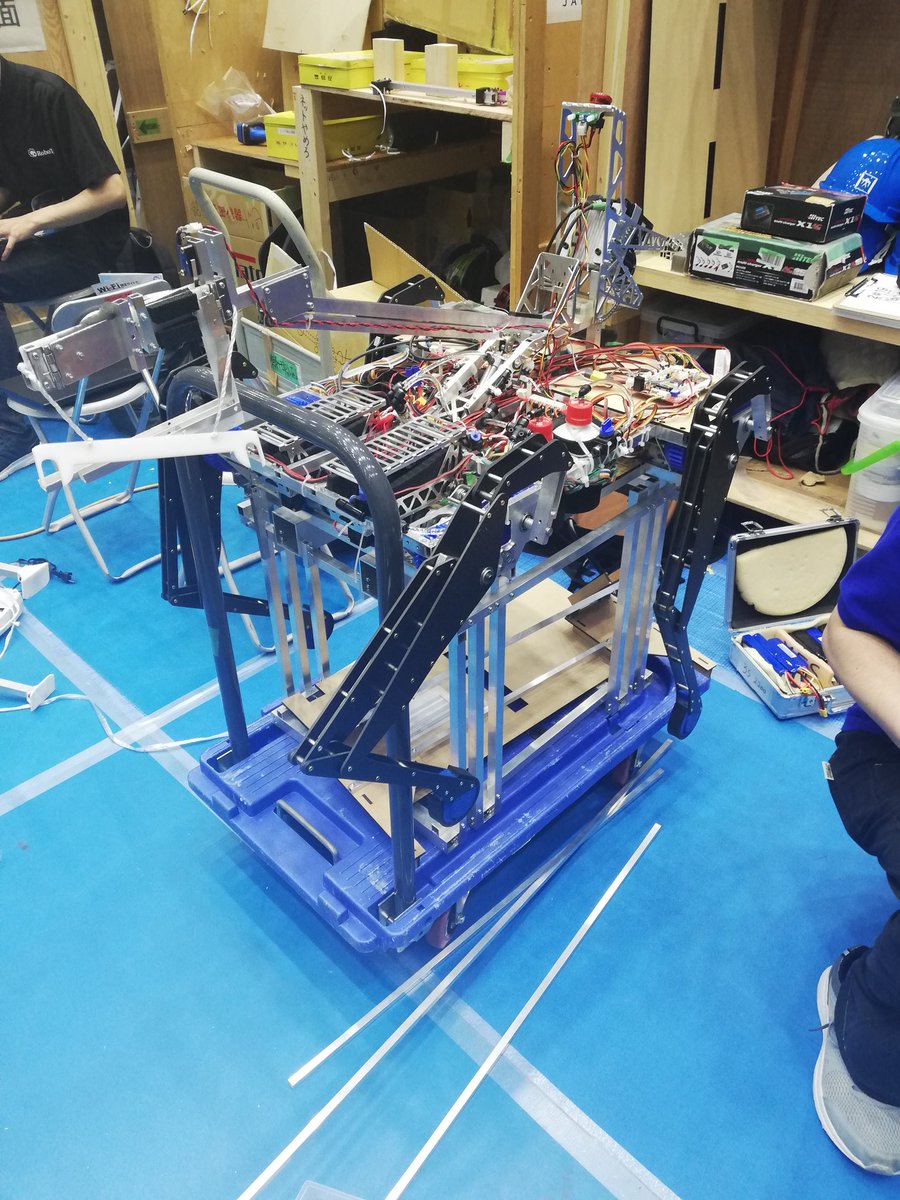
立命館大学 RRSTのMR1、MR2です。MR2の脚は前後2点で接地していて4本平行に並んでいます。

赤フィールドでは京都大学のロボット調整が行われました。静かに滑らかに動きふわっとシャガイを投げるMR1と着実に進んでいくMR2が見られました。これからゲルゲの受け渡しの調整をするようです。

ものつくり大学 イエロージャケッツのMR1、MR2です。MR2は脚を外して調整中とのことです。調整頑張って下さい!

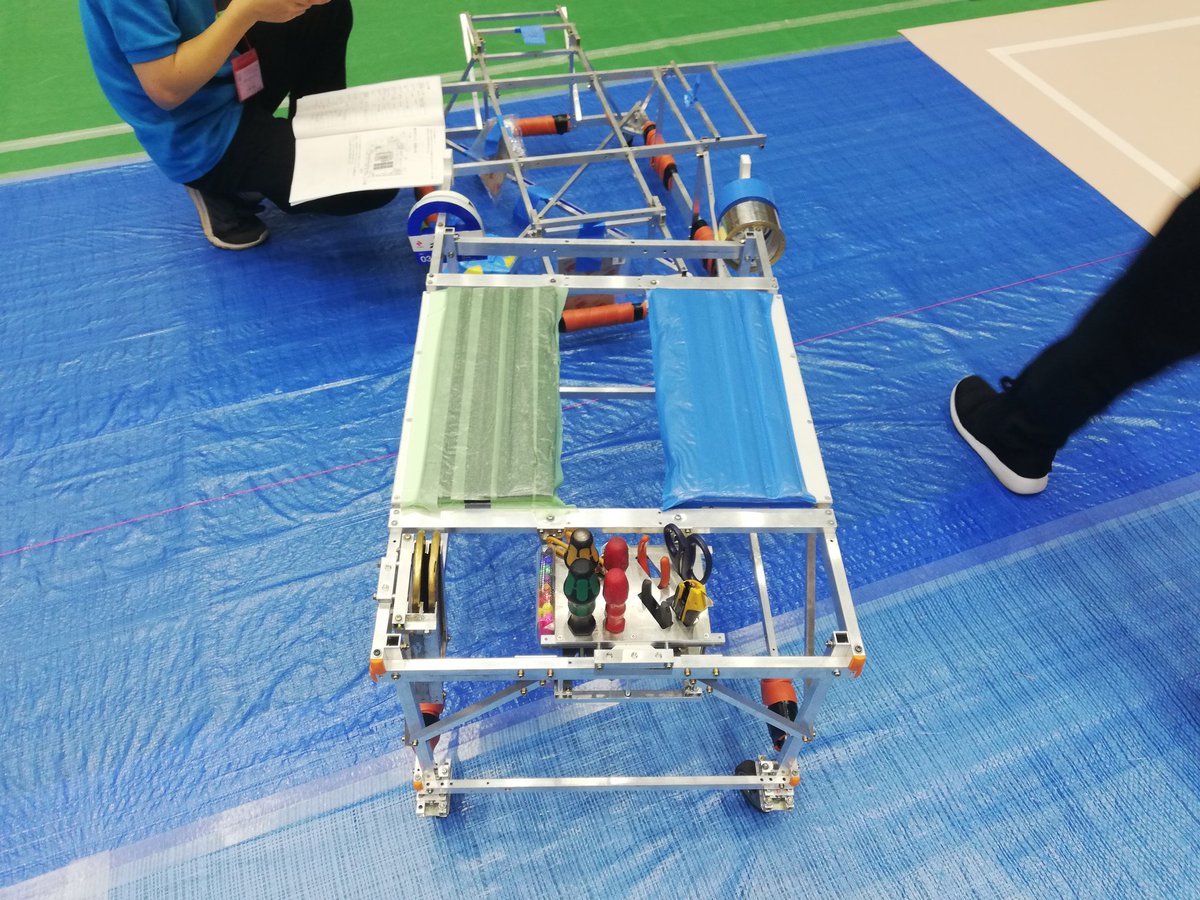
東京工科大学 プロジェクトRのMR1、MR2です。MR2は直行するスライドレールで歩行する足回りです。プラダンをうまく使っていて、歩くたびにケーブルがアメンボの足のように曲がります。

赤フィールドでは長岡技術科学大学のロボット調整が行われました。8つのオムニホイールを用いて高速移動するMR1とロープ下をくぐるMR2がシャガイの連投作戦で最速ウーハイを狙います。

赤ゾーンでは京都工芸繊維大学のロボット調整が行われました。ローラ射出のシャガイ投げの音が特徴的です。シャガイ投げとMR2の歩行の調整にほとんどの時間を使っていました。

青ゾーンで立命館大学のロボット調整が行われました。MR2は壁を利用した動きで着々と進んでいく姿が見られました。シャガイとLZの摩擦の大きさに苦戦している様子で、シャガイを投げ続けて調整を繰り返していました。
長岡技術科学大学 RoboPro長岡のMR1、MR2です。MR2の鮮やかな脚はスプレーで着色したそうです。
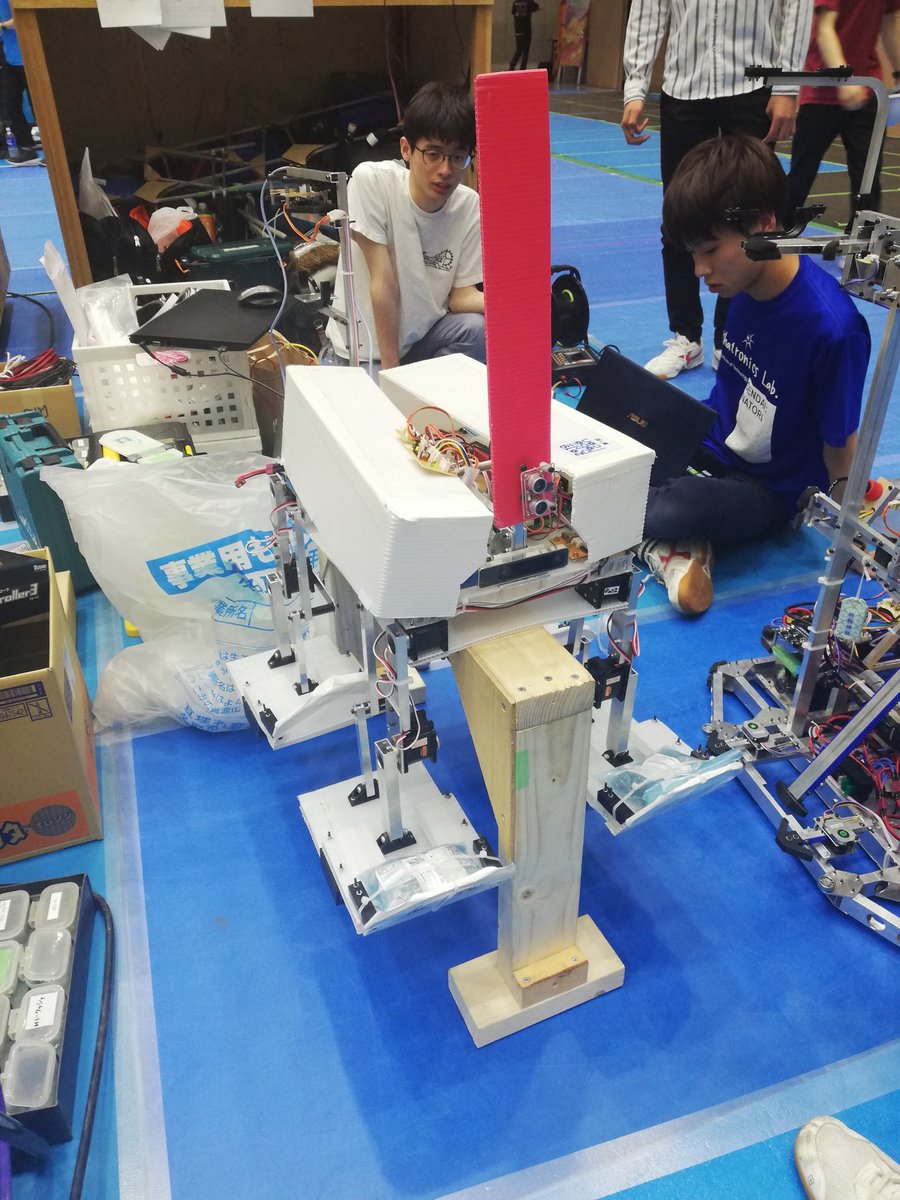
仙台高専 N.M.LabのMR1、MR2です。MR2はハニカムプラダンが使われた広めの足です。

赤ゾーンでは早稲田大学のロボット調整が行われました。投げたシャガイがウーハイゾーンまで飛んでしまうトラブルもありましたが、滑らかな走りと大胆なシャガイ投げのMR1と大きな音を立てながら進んでいくMR2が走り回っていました。

青ゾーンでのロボット調整が再開され、横浜国立大学のロボット調整が行われました。MR1は高速に移動するも森の中で引っかかってしまう様子が見られました。一方MR2はゆっくりながら着実に進んでいる様子でした。

赤フィールドでは九州大学が繰り下げられ東京大学がロボット調整をしました。シャガイ投げに失敗しましたが30秒かからずにウーハイできそうでした。その後MR2は動かず、シャガイを何度も投げて調整を繰り返していました。

青フィールドでは新潟大学の調整が行われました。MR1はあまり走りませんでしたが、MR2は着実に歩を進めていました。

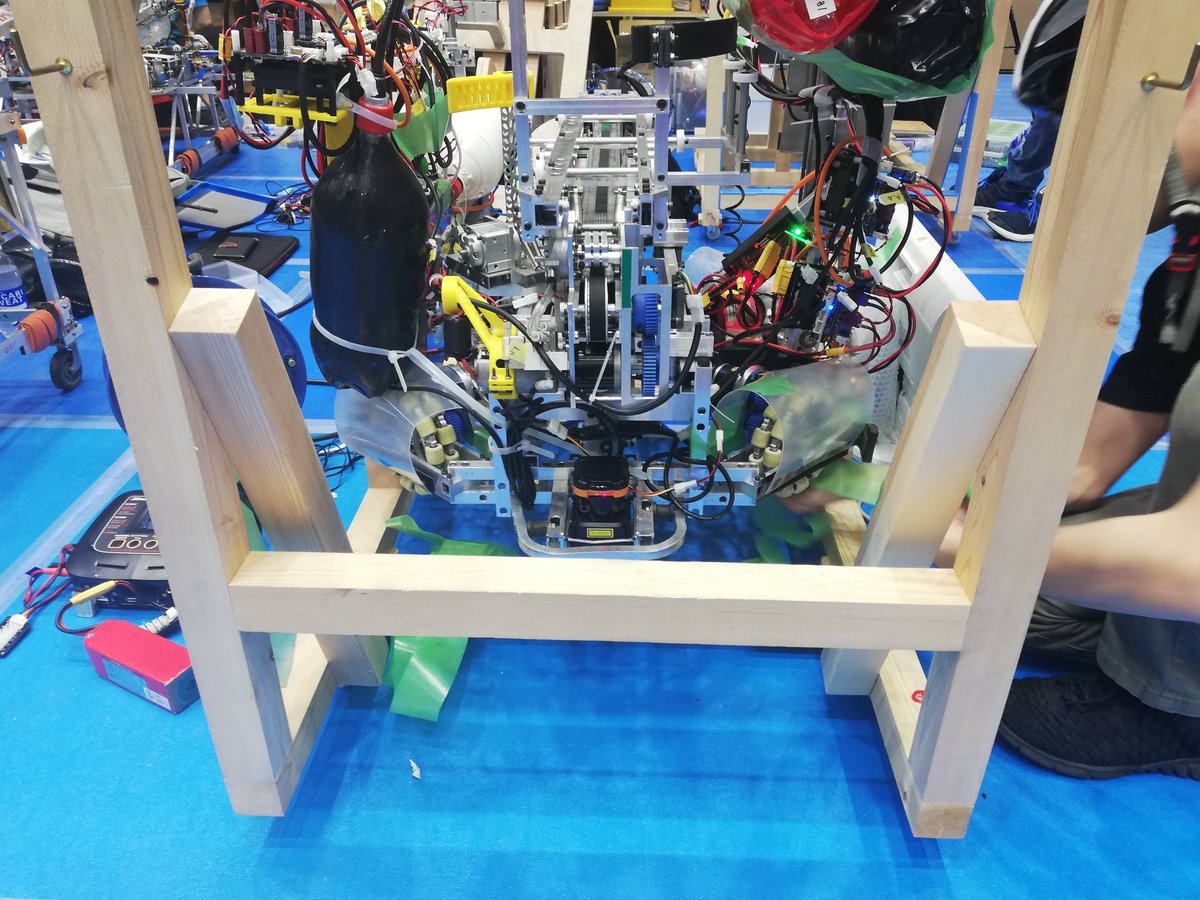
試合には出場しませんがロボットのメンテ台もチームによって様々です。東京工科大学のものは組立分解しやすそうなジョイント式、豊橋技術科学大学のメンテ台には工具ホルダーとゲルゲ入れがついています。

青ゾーンでは熊本大学のロボット調整が行われました。シャガイをヤギの姿勢にしてセッティングしています。12自由度のMR2がスムーズに移動していました。

赤フィールドでは三重大学のロボット調整が行われました。MR2が大きいのが特徴的です。MR1は滑らかに走り、一度で馬を出しました。

先程豊橋技術科学大学のMR2が引っかかってしまった紐はビス留めで強化されました。

青フィールドでは東京工科大学のロボット調整が行われました。MR1はシャガイを投げ、一度で馬を出しました。MR2はロープにつまづく場面があり、これから調整するようです。


東京大学がロボット調整のため繰り下がり、豊橋技術科学大学が赤フィールド一番目になりました。MR2がロープな引っかかってしまう場面もありましたが、およそ20秒で見事ウーハイしました。

フィールドではロボット調整が始まりました。計量通過順を元に決まった順番でロボット調整とロボット審査が行われていきます。最初にロボット調整を行うのは富山大学です。MR1が快調に走っています。MR2とシャガイ投げの精度をこれから高めていくようです。

京都工芸繊維大学 ForteFibreのMR1、MR2です。MR1はロボット上半分の角度が変えられるようになっています。

豊橋技術科学大学 とよはし☆ロボコンズのMR1、MR2です。MR2には高さ制限をクリアするための結束バンドが付いています。

フィールドの準備も大詰め。ロープの張り具合を調整しているようです。

12:30からのテストランに向け調整が行われています。

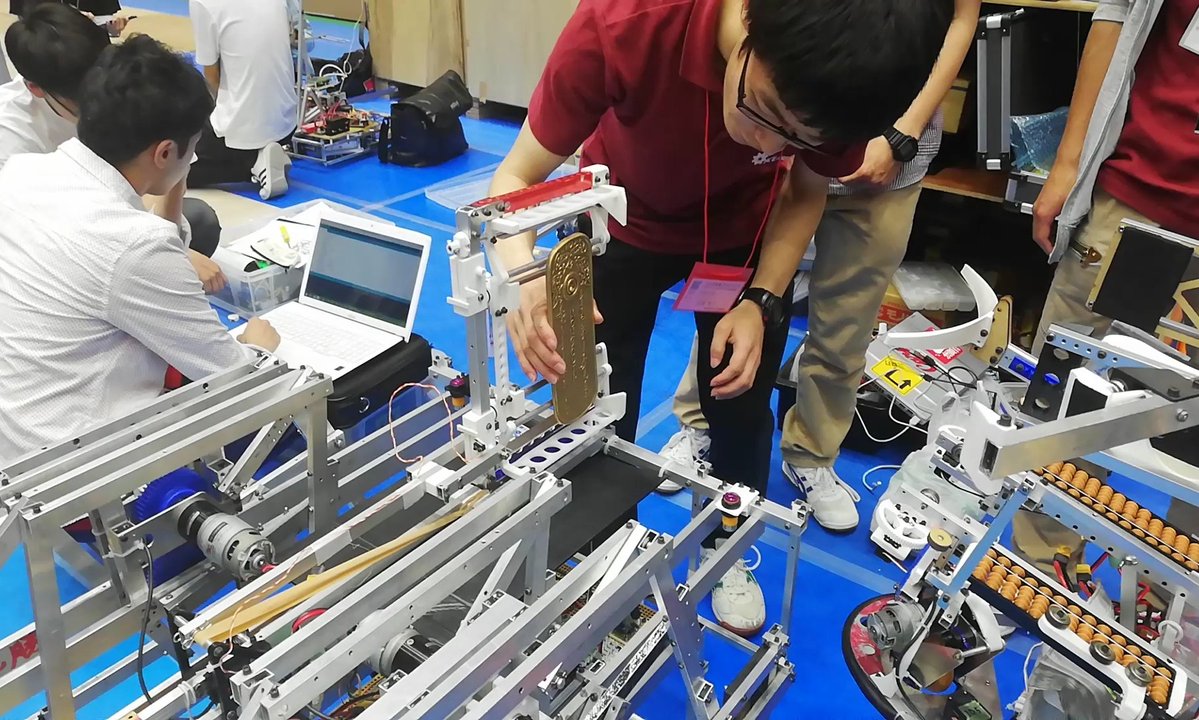
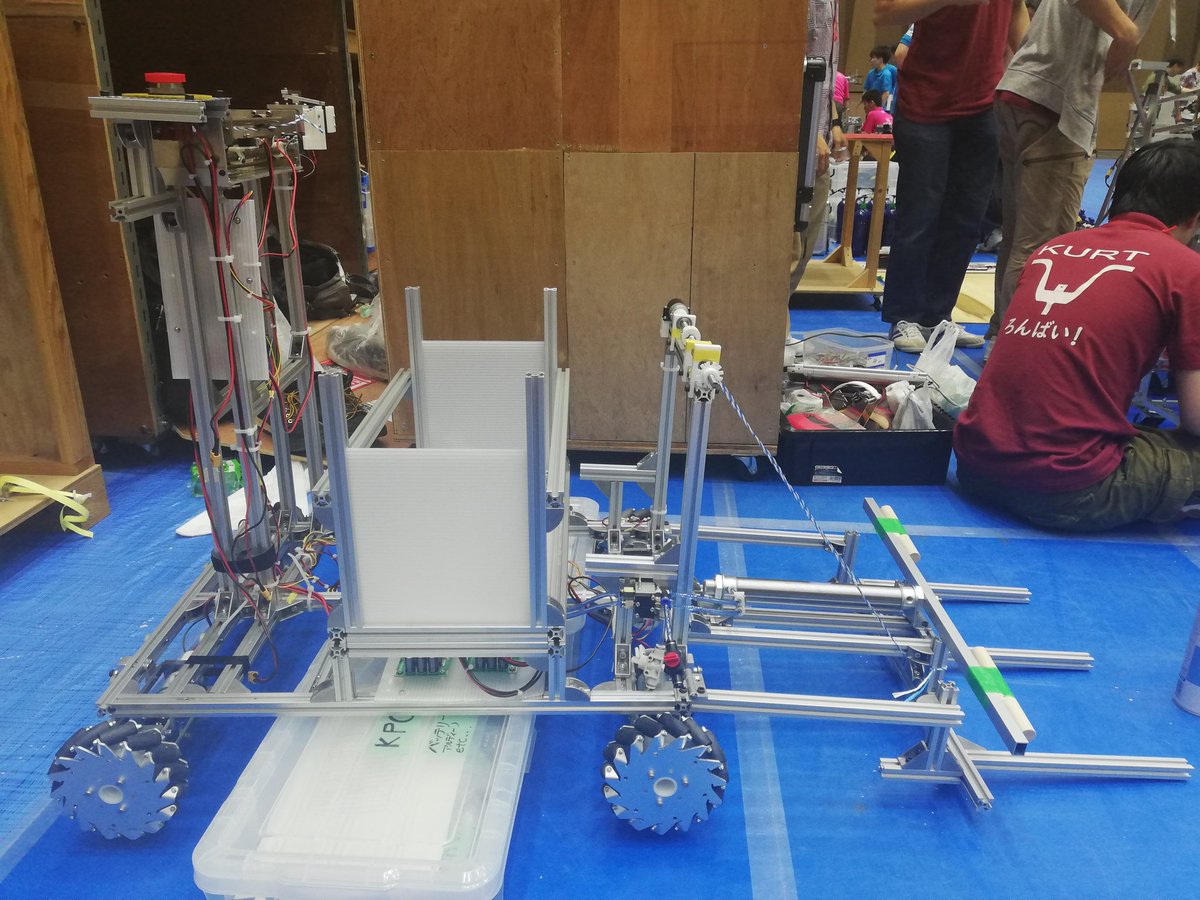
九州大学 KURTのMR1、MR2です。MR2のゲルゲ受け取りの動作確認をしていました。
九州職業能力開発大学校 ポリテク9のMR1、MR2です。MR1には今回の大会では珍しいメカナムホイールが使われています。
富山大学 TomiRoboのMR1、MR2です。MR1にはなめらかなオムニホイールが使われていますが、以前からあったもので入手方法は不明とのことです。
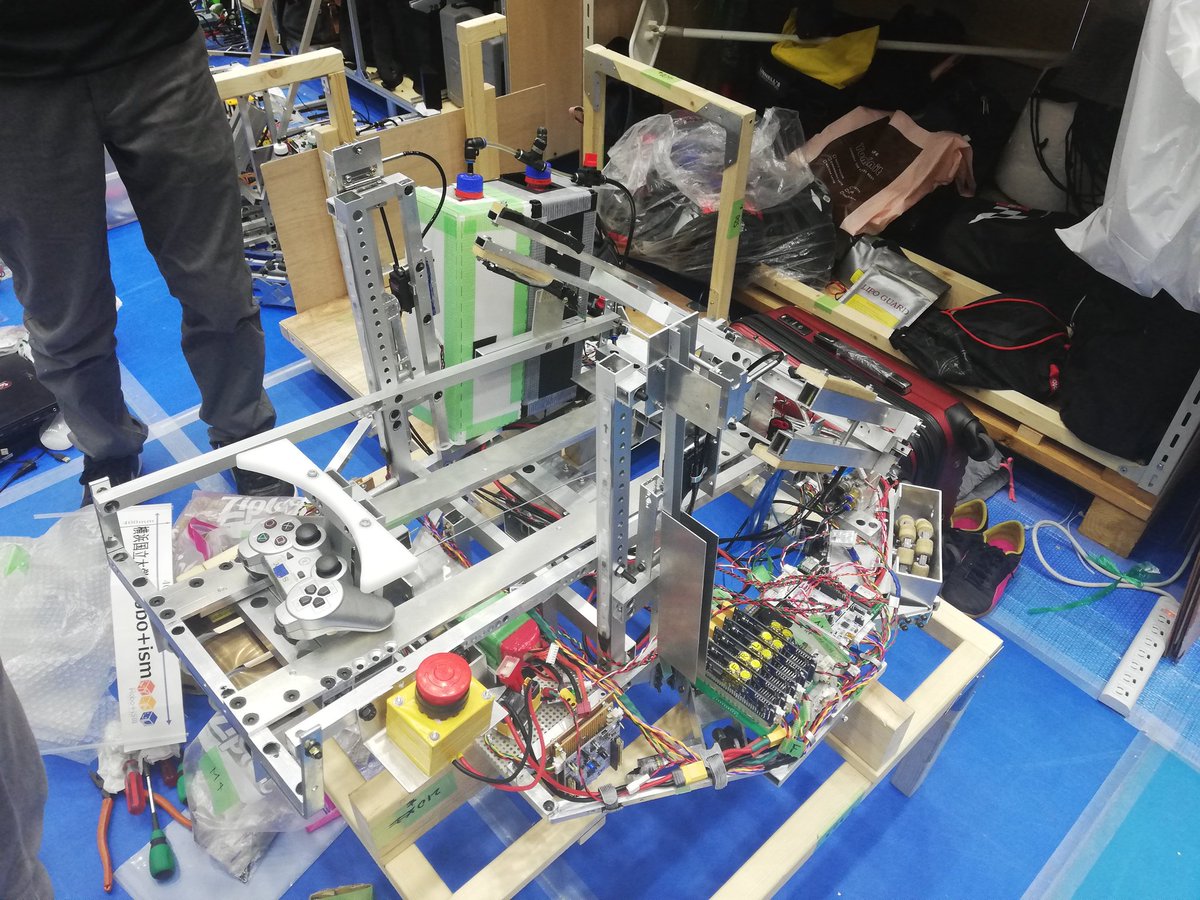
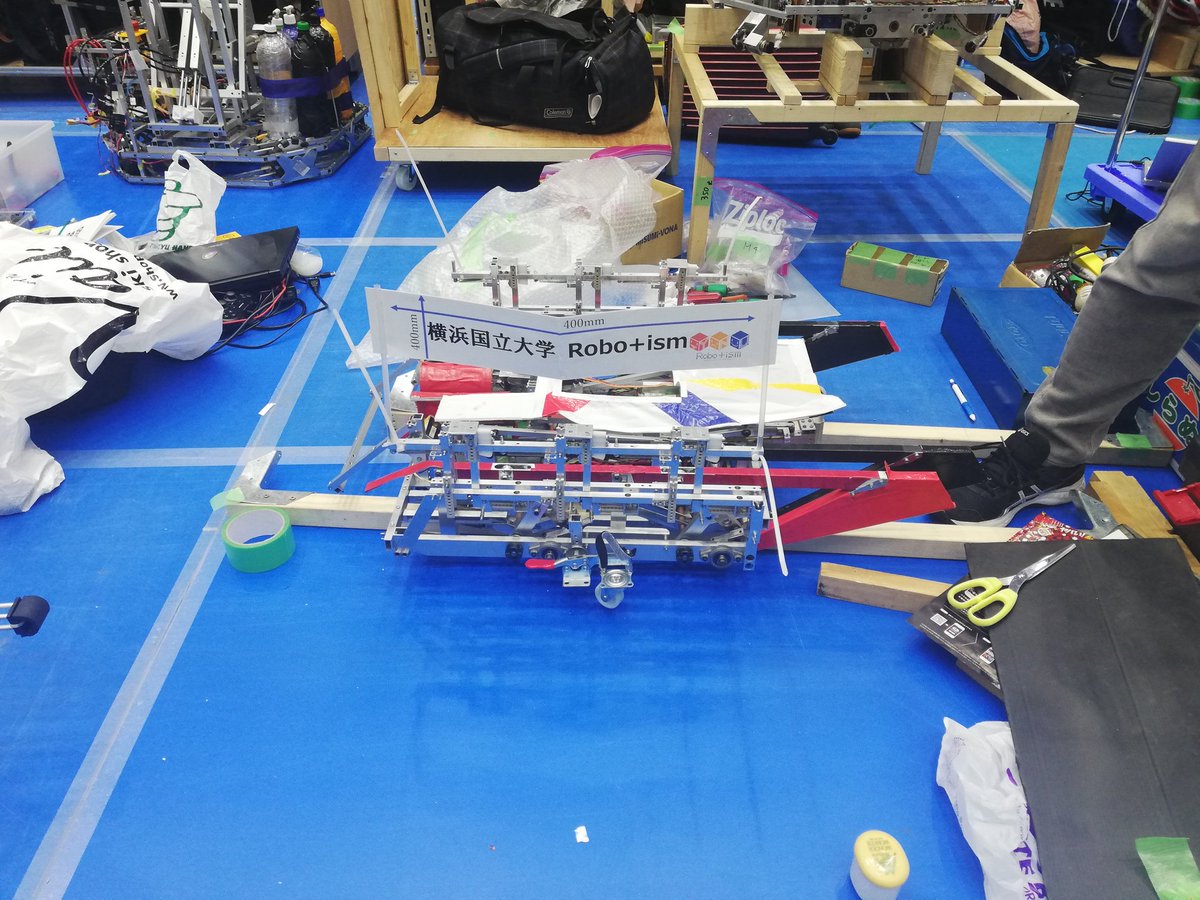
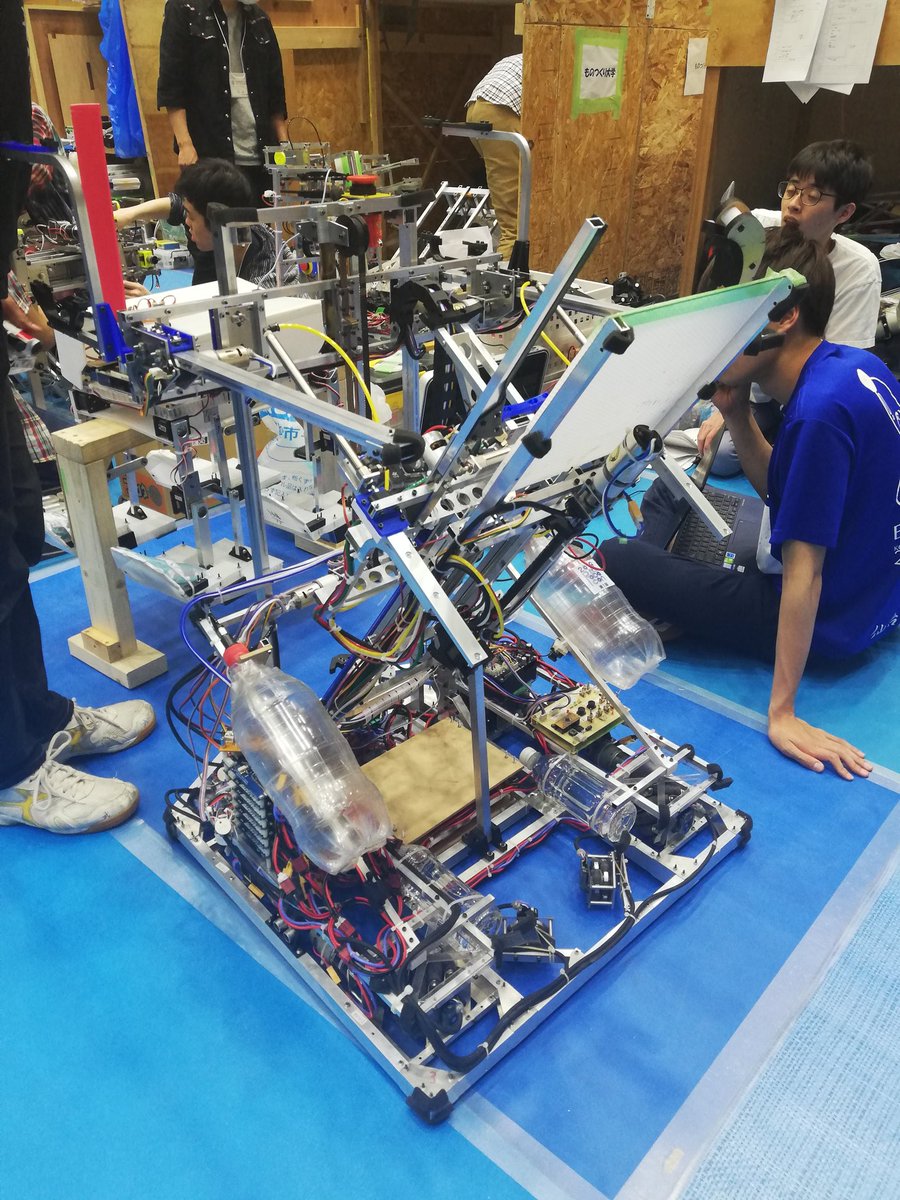
横浜国立大学 Robo+ismのMR1、MR2です。MR2にはロボット運搬に便利なキャスターが付いています。
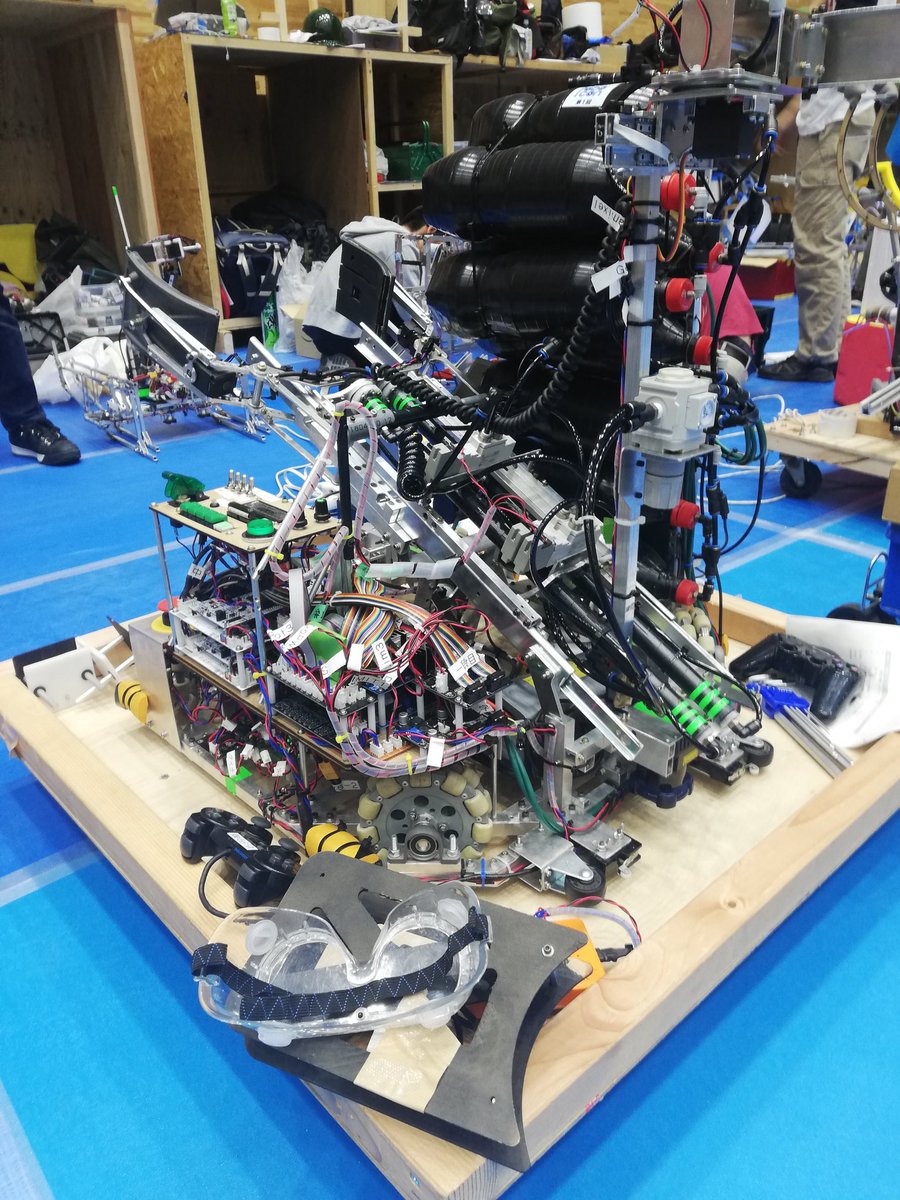
慶應義塾大学 IliasのMR1、MR2です。MR2は熊本大学と同じく12自由度の脚を持っています。
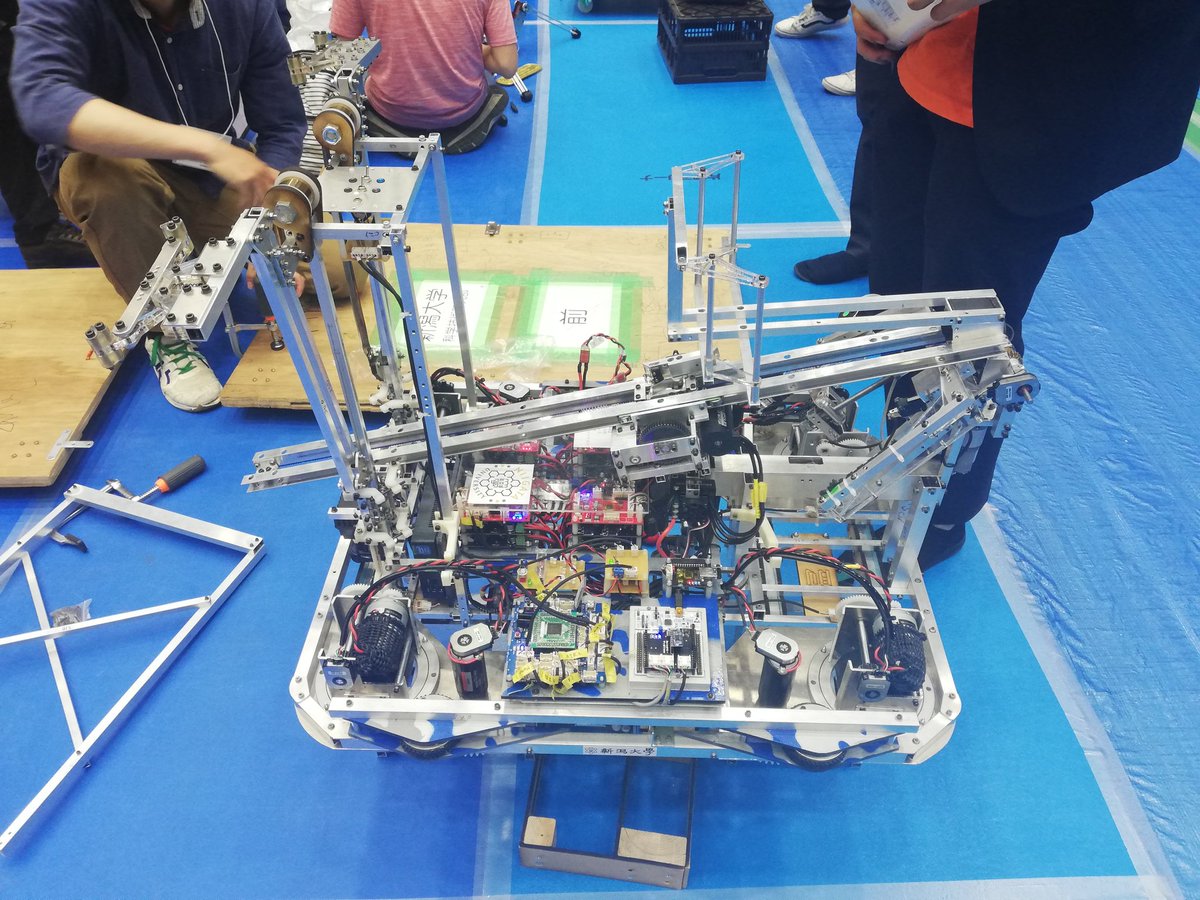
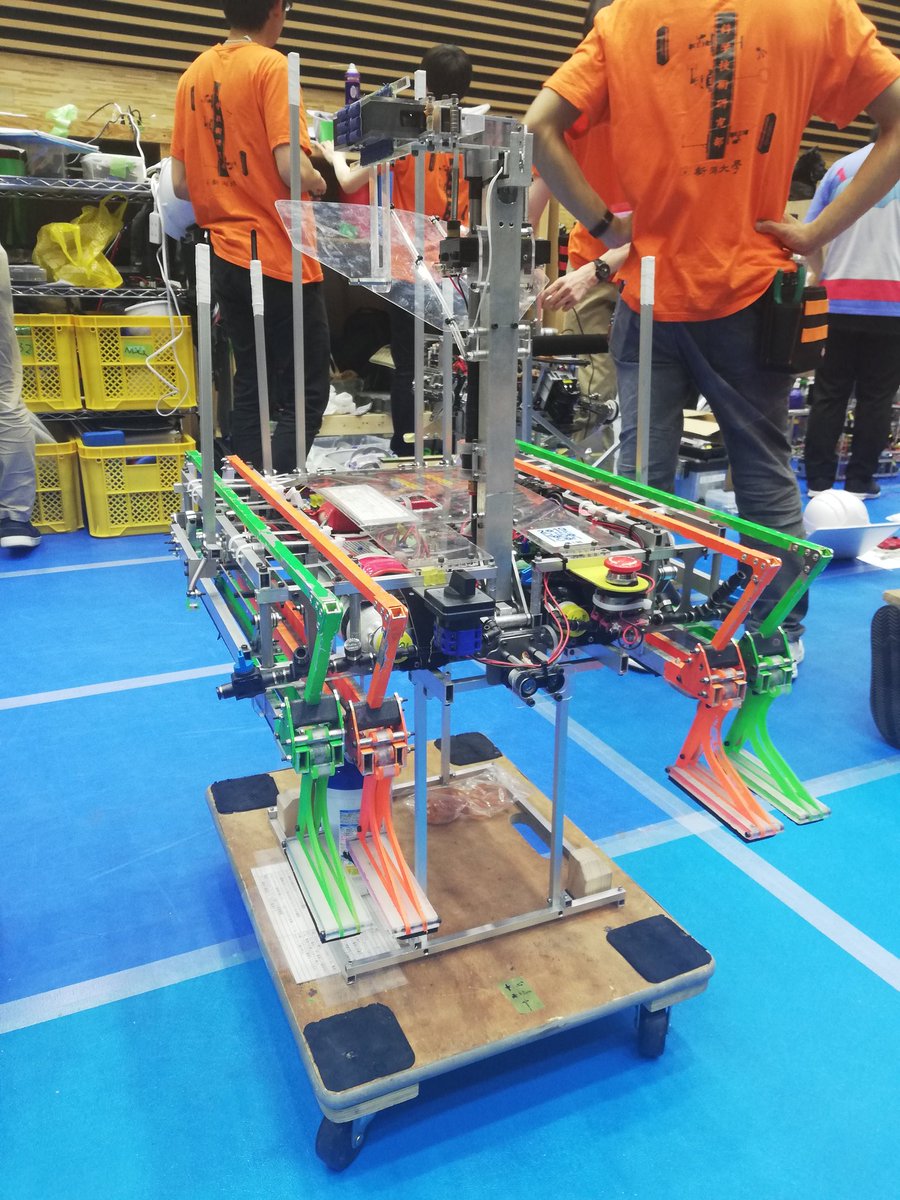
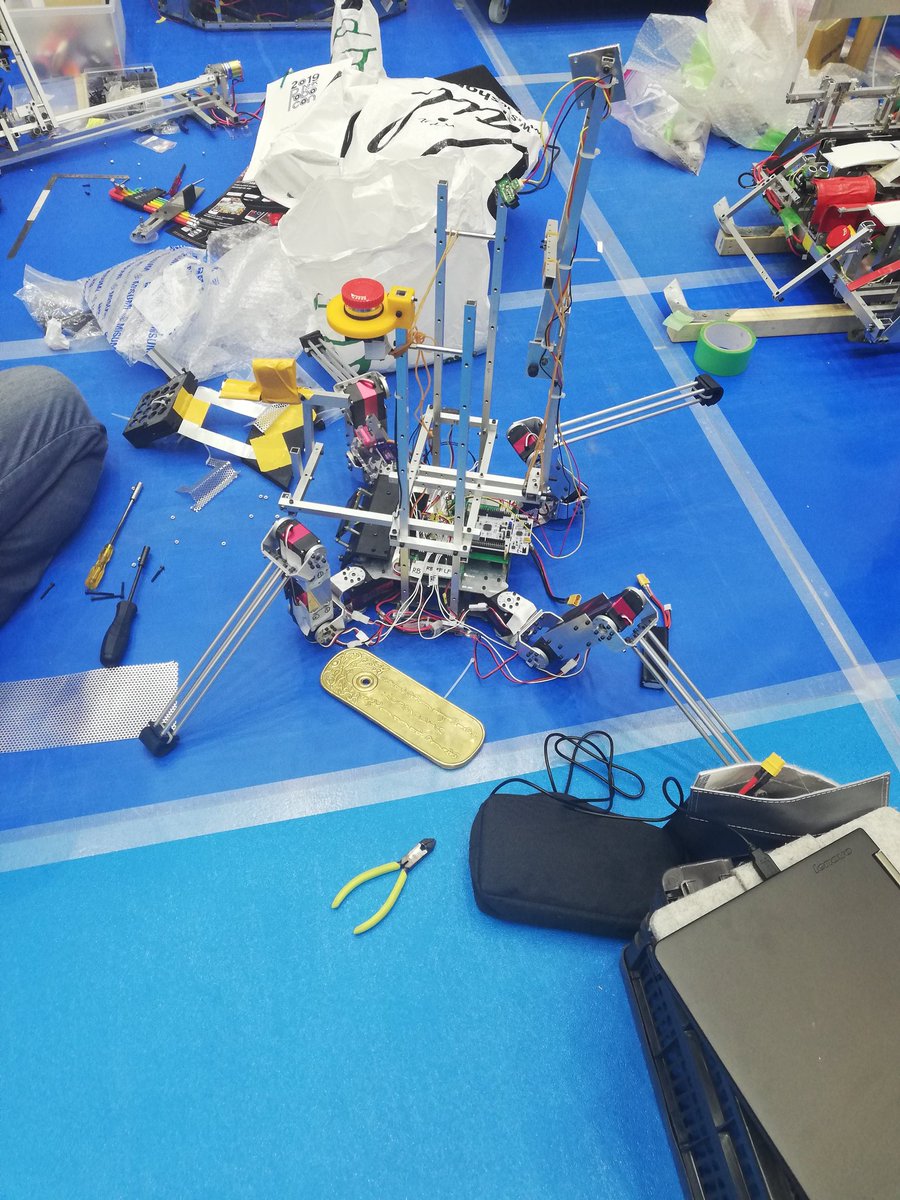
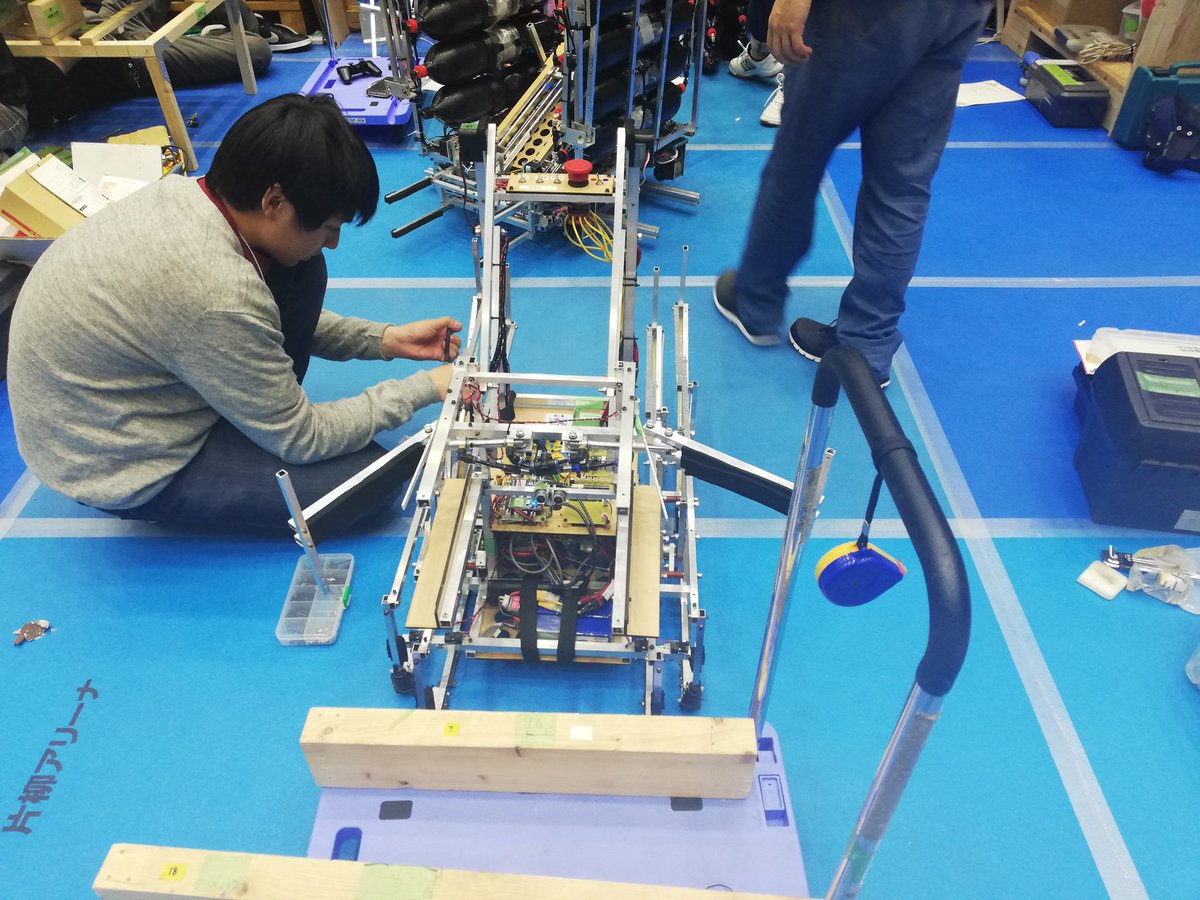
新潟大学 科学技術研究部のMR1、MR2です。MR1の足回りは東京大学や早稲田大学と同じステアタイプのようです。
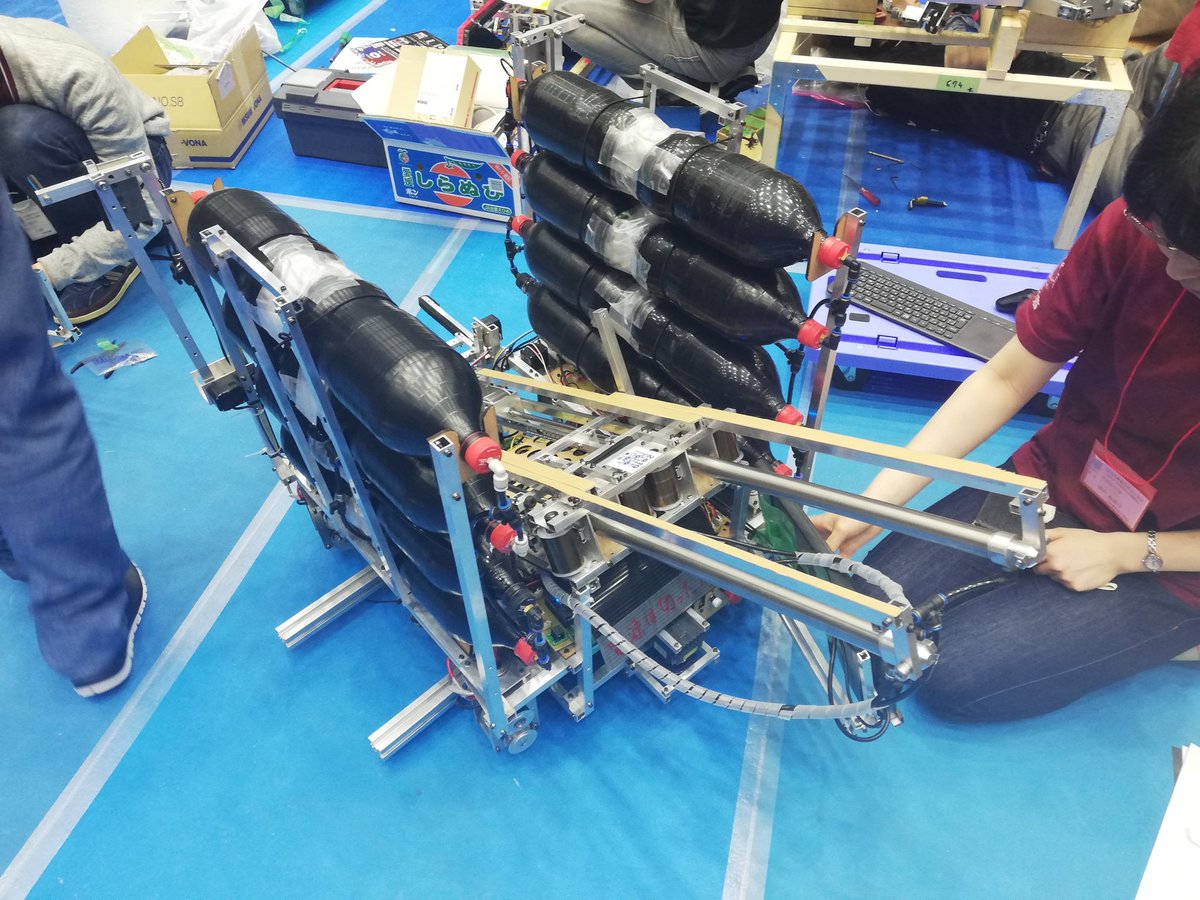
早稲田大学 ROBOSTEPのMR1、MR2です。MR1のエアタンクはユニットになっていて便利そうです。
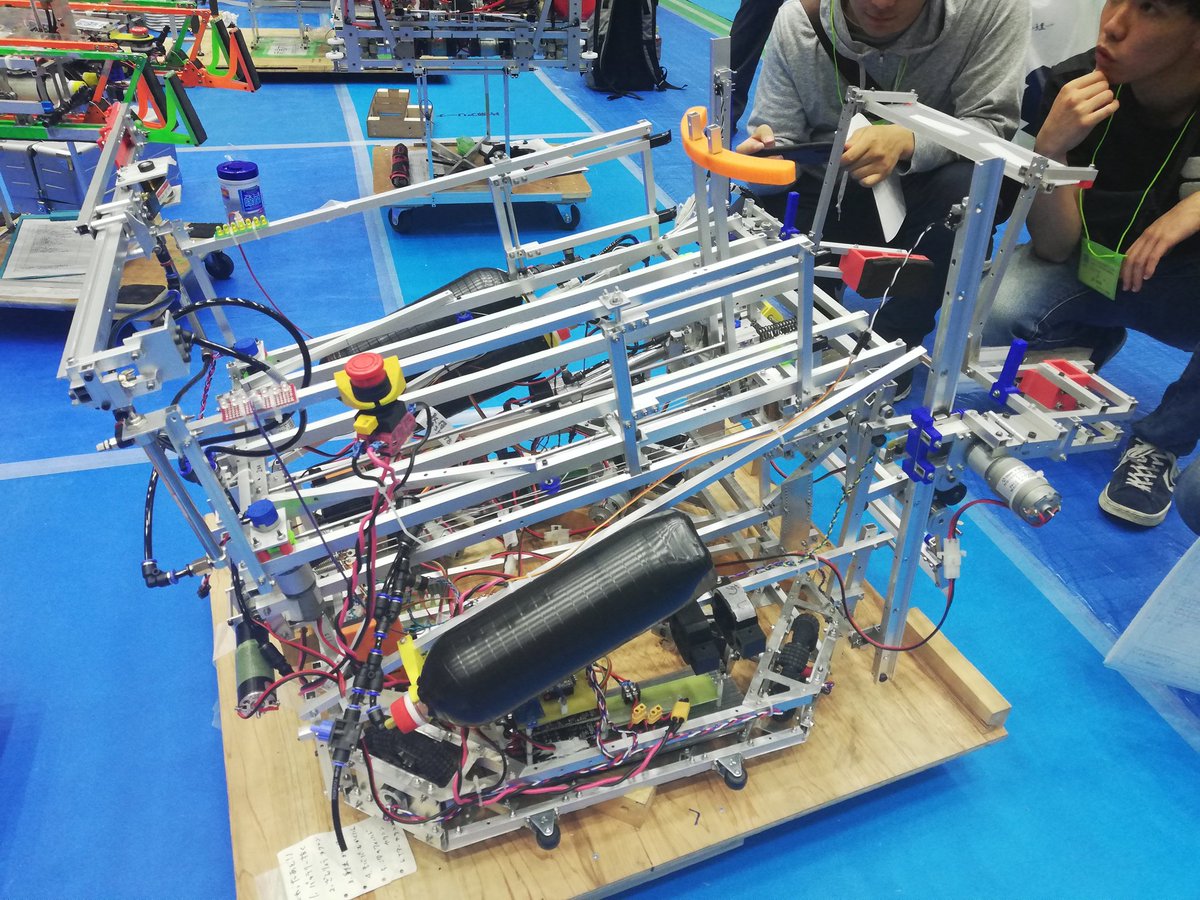
東京工業大学 MaquinistaのMR1、MR2です。計量をクリアすべく調整中とのことです。CFRPで作られたMR2の脚が美脚。

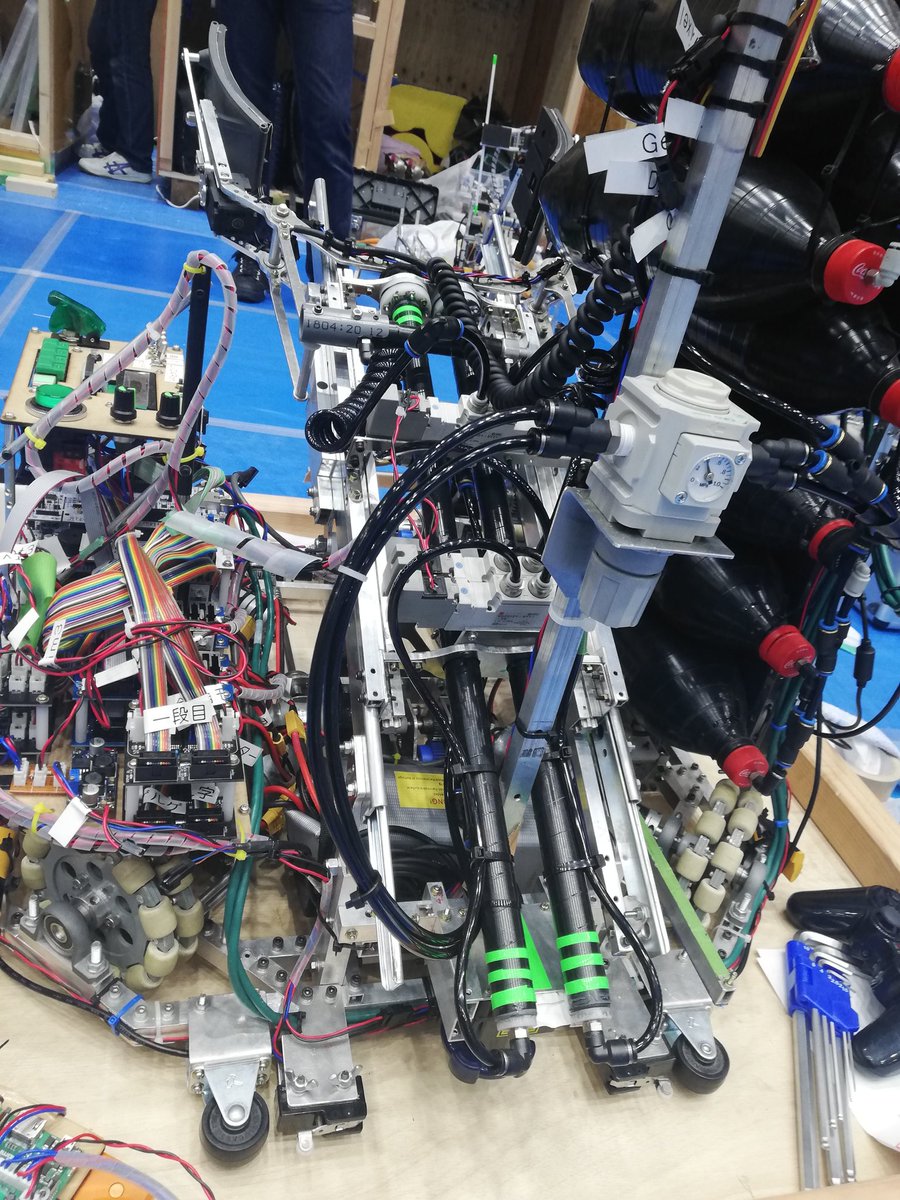
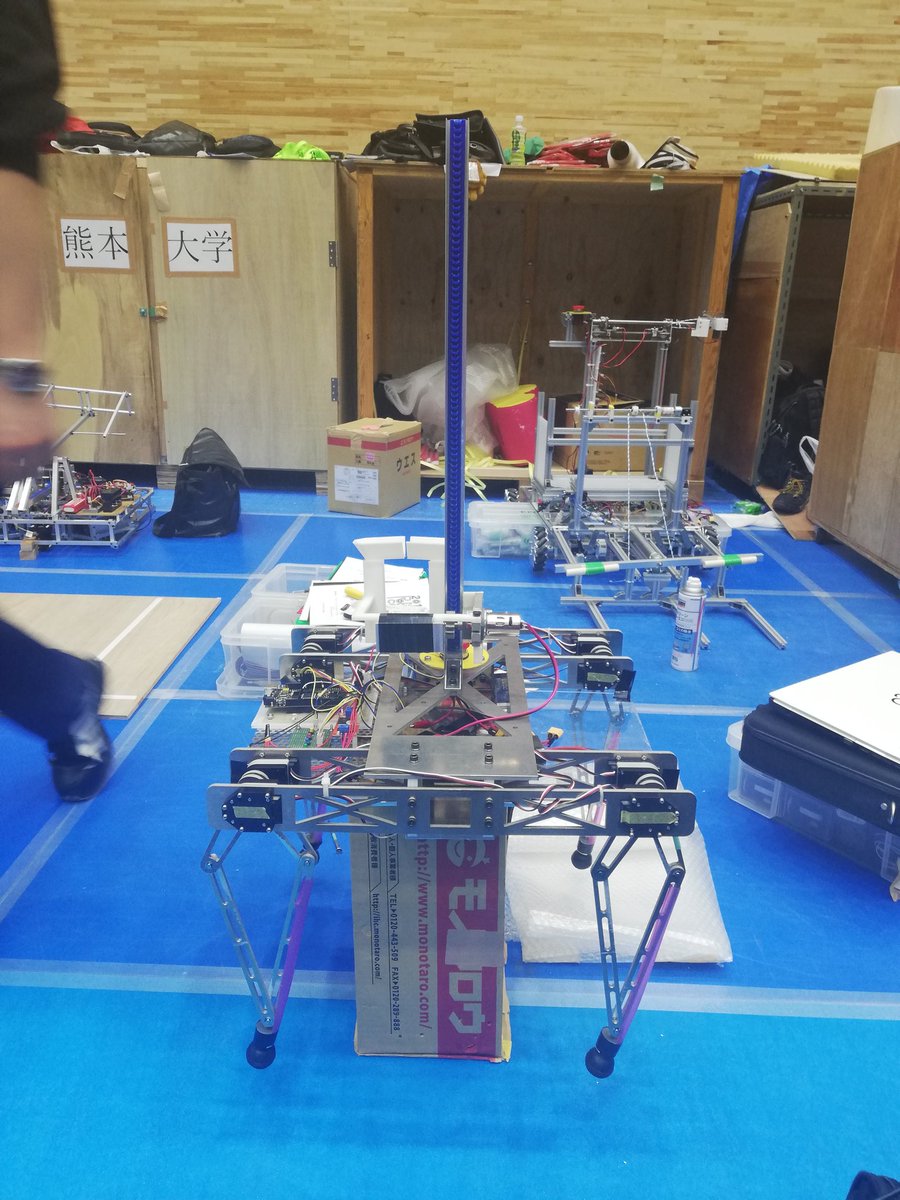
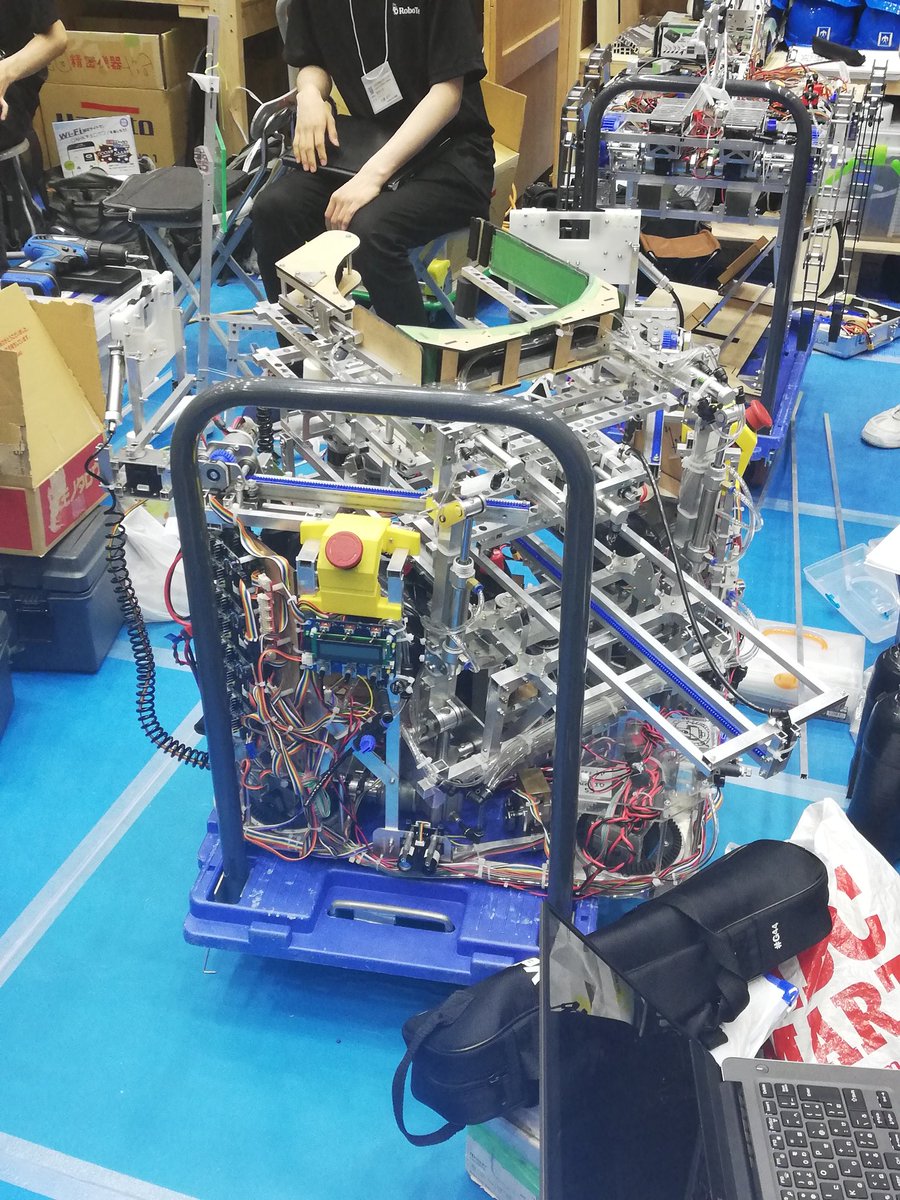
熊本大学 からくりサークルのMR1、MR2です。このチームのMR2は脚の付け根にもモータがついている12自由度タイプのロボットです。
チームによって梱包箱も様々です。

会場ではオリエンテーションが始まりました。

試走場でのロボット動作チェックが始まっています。手前は東京大学、奥側は豊橋技術科学大学です。
三重大学 M3RCのMR1、MR2です。MR2が他のチームに比べ大きめです。

重量超過のため計量を通過できなかったそうです。800g の減量は大変だと思いますが間に合わせてほしい…!
金沢工業大学 蹄翔のMR1とMR2です。MR1にはシャガイ投げ用と見られる定荷重バネがついています。
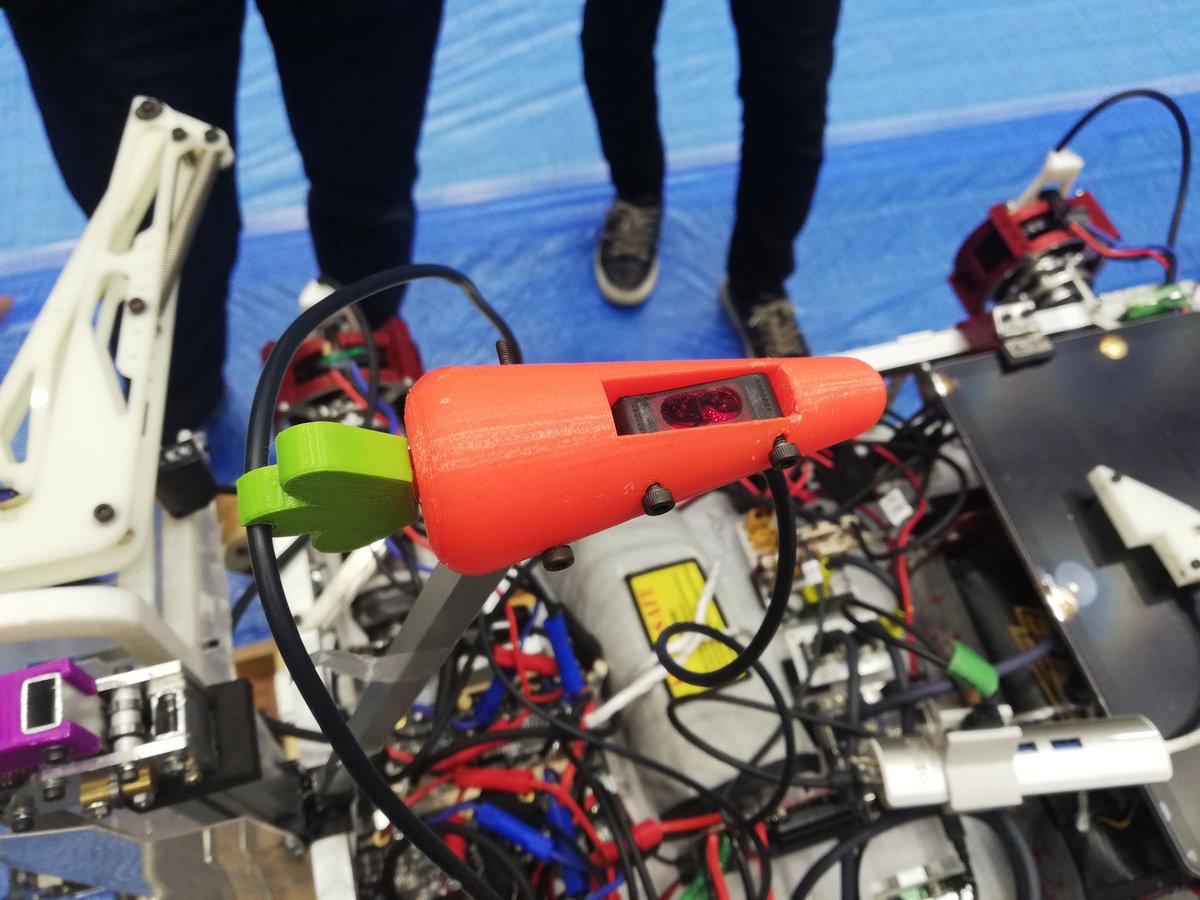
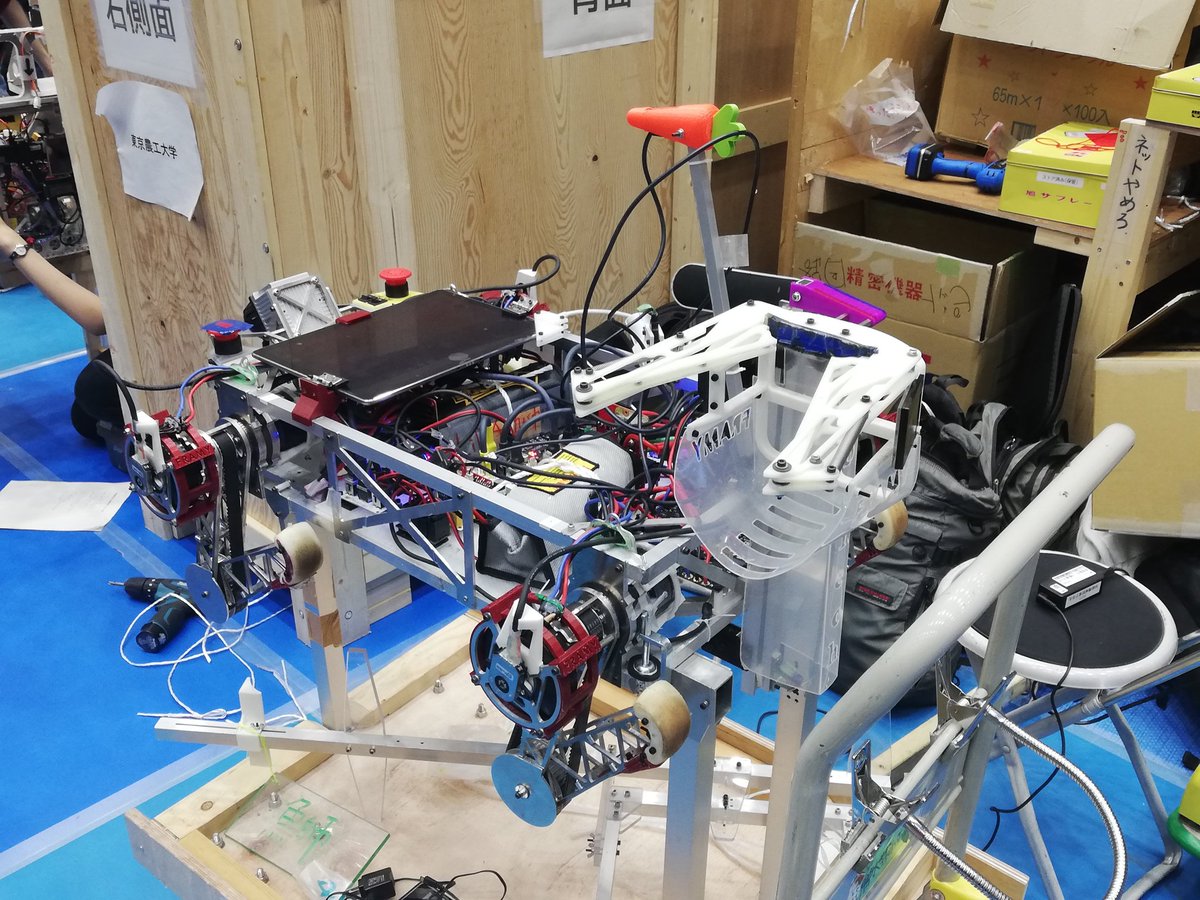
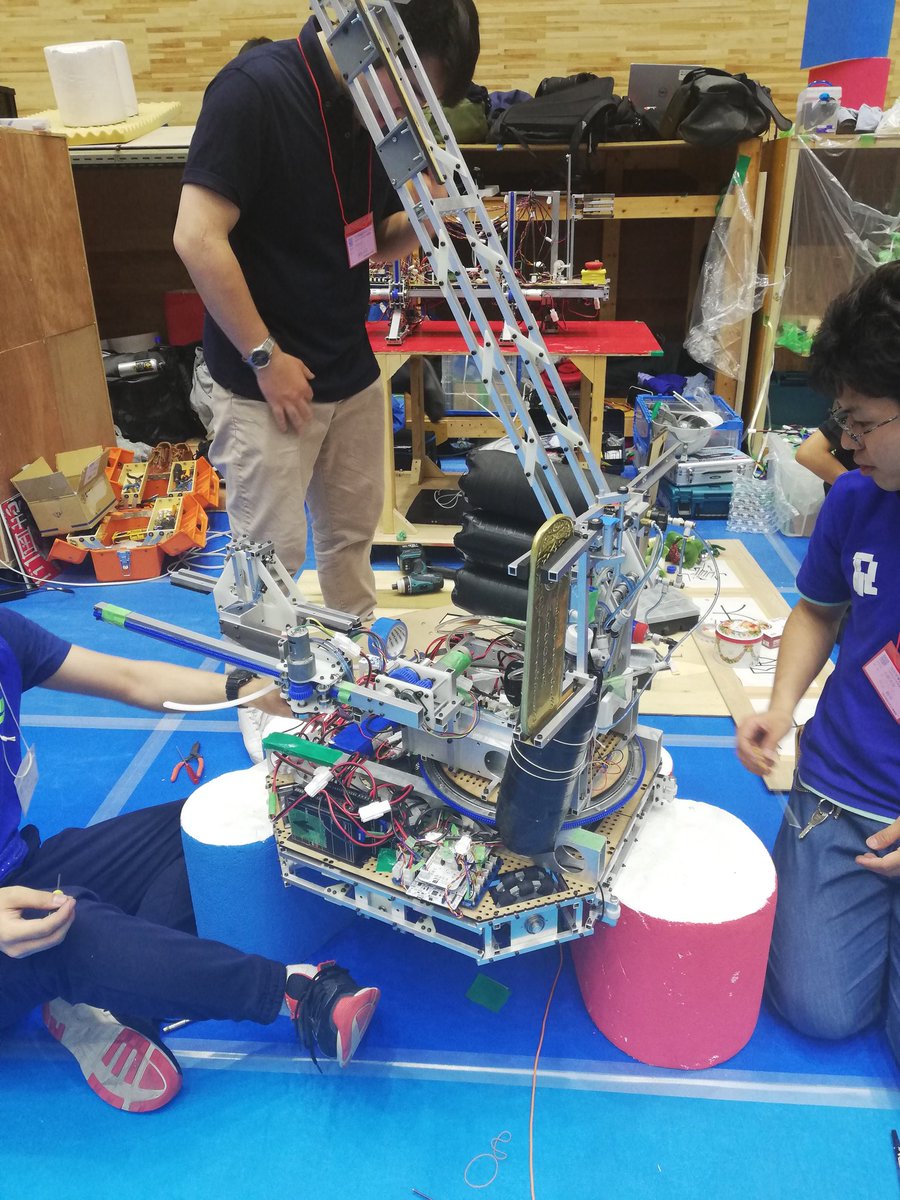
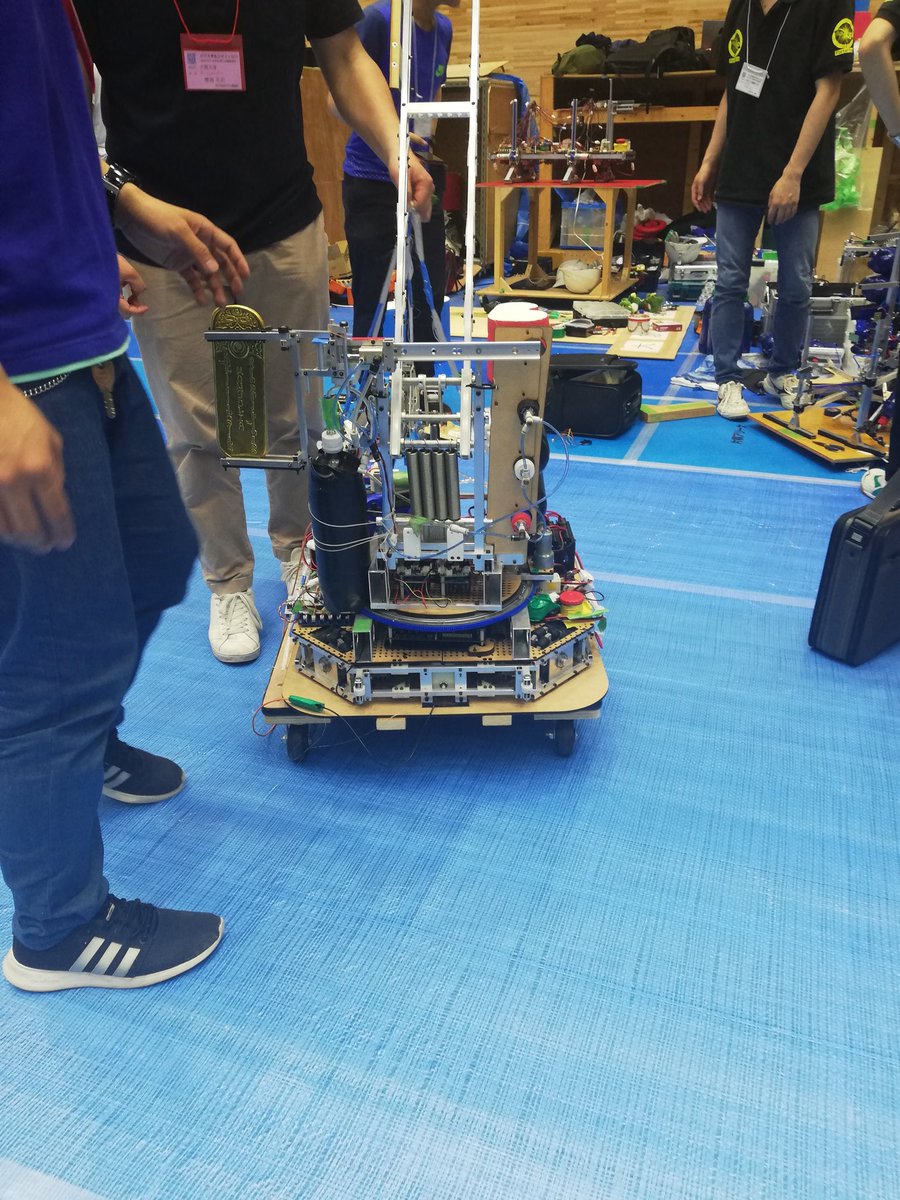
東京大学 RoboTechのMR1、MR2です。MR2のにんじんの中にはセンサが隠れているようです。


棚を用意して狭いピットを有効活用しているチームもあります。空調は効いていますが、体調に気をつけてどのチームも2日間頑張ってください!

本番用シャガイがたくさん用意されています

計量が始まりました。一番乗りはRoboTech、次にROBOSTEPが並んでいます。

出場チーム受付が始まっています


取材のため会場に入りました。チーム受付が始まり、ピットでは開梱が始まりました。






