2019年5月25日、学生ロボコン前日の様子を会場からお届けする「前日レポート」、こちらでは会場の様子や各チームの準備、ピットの状況を中心にお伝えする。
テストランのレポートは、下記をご覧いただきたい。
https://deviceplus.jp/events/nhk-robocon2019-testrun-01/
なお、ピットの模様は、下記記事でも順次公開している。
https://deviceplus.jp/events/nhk-robocon2019-realtime-testrun/
今回の会場は、日本工学院専門学校「片柳アリーナ」
学生ロボコンの会場とされるのは初めてとなる、片柳アリーナ。日本工学院専門学校と共同の敷地で、駅から近く、コンビニや飲食店も多い。
ピット~フィールドが近い!

今回の会場で最大の特徴となるのは、ピットと会場の距離だ。過去の数大会では、ピットはフィールドと離れた「控え室」のエリアにあった。ピットとフィールドを行き来する場合、ロボットを持って段差やドアを通り、部屋を移動する必要があったのだ。今回は、メイン会場の奥側3分の1ほどをタワーで間仕切りしてピットとしている。フィールドとピットの距離は最短で20mほどで、一部の客席からはピットの中も見えるのではないだろうか。
ピットまで梱包箱が搬入されている
過去の大会では、「梱包箱が置かれているエリア」と「ピットエリア」も別れていた。しかし今回は、各チームのピット位置に、ロボットの梱包箱が置かれている。開梱したロボットをピットまで運ぶ必要もなく、ピット間の通路も広々としている。ピットクルーとしては、かなり嬉しいつくりになっているのではないだろうか。
フィールドとピットが近いことのメリット・デメリットは?
運搬距離が短ければ、運搬中のトラブルのリスクも下がる。勝負に集中できる環境で、各チーム最高のパフォーマンスが発揮されるだろう。しかし、本戦では、どうしてもメインフィールドでのバトルが優先されると思われる。たとえば、掛け声や大きな音の出る作業など、離れた部屋でなら問題のなかった行為も、今回はできなくなるかもしれない(実際、エアコンプレッサはピット・フィールドの室外に置いてある)。今まで以上に、前日テストランでの合わせ込みが重要になってきそうだ。
タイムラインとチームの特徴ピックアップ
ここからは、本戦前日の様子と参加チームの特徴を、時系列で紹介していく。
9:30 チーム入場開始

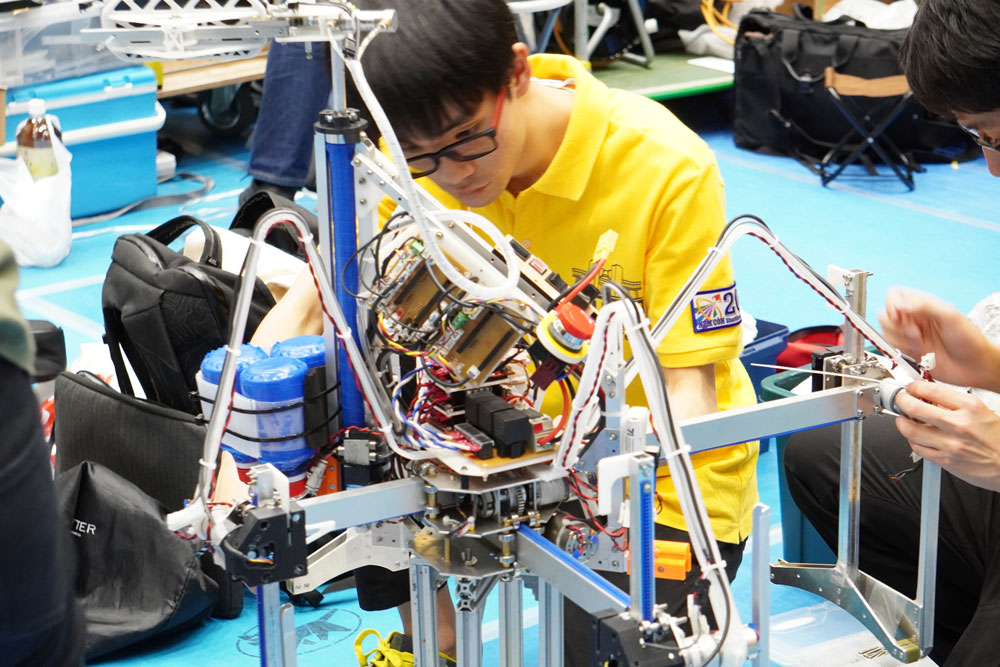
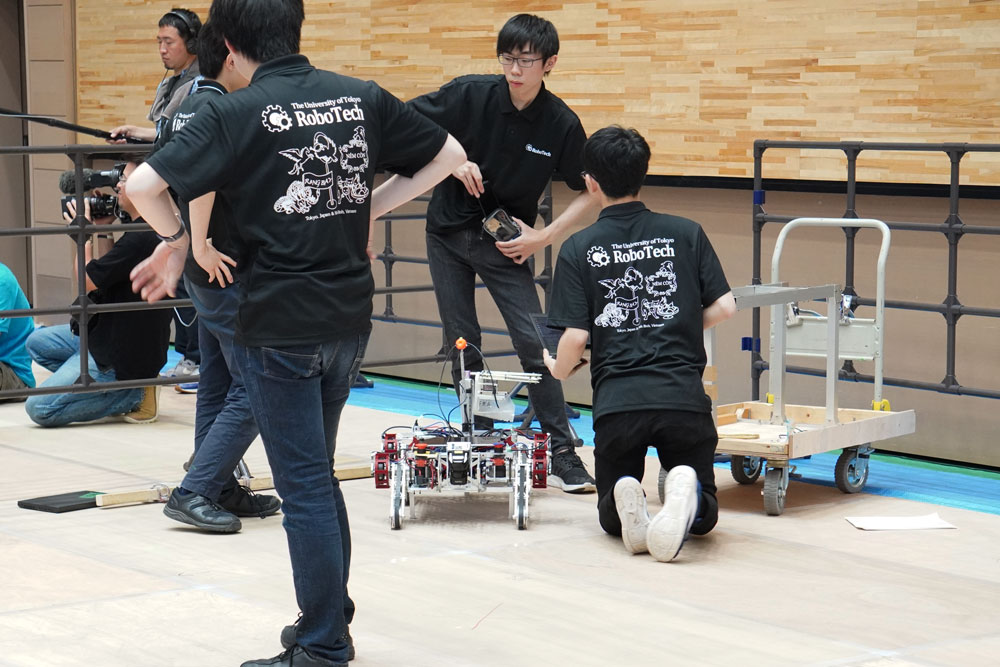
開場後まっさきに開梱作業に入ってきたのは、やはり東大RoboTechだった。MR1の足回りは、去年の「彼氏・彼女」と同じか? タイヤ位置がステアリングの回転軸からずらしてある。東大OB・豊島さんいわく「制御のしやすさを追求したのでは」とのこと。ほかピットのセッティングが早かったのは、九州大学・京都工芸繊維大学・東京工業大学だった。早く開梱作業に入れれば、そのぶん長い時間調整ができる。出慣れている学校は、勝つためのチームワークもハイレベルだ。
10:00計量開始
ここでも真っ先に計量に入ったのは東大。サイズ、重量ともにあっさりパスしているように見えた。
豊橋技術科学大学は、MR2が特徴的だ。砂漠エリアのロープを「くぐる」ために重心を落とし、ダウンフォースを感じる平らな甲虫のようなボディになっている。高さ制限の下限を超えるためか、大きな結束バンドがマシンから垂直に立っていた(とても触覚っぽい……)。
豊橋同様、ロープをくぐるのは横浜国立大学と長岡技術科学大学。豊橋と同様の足回りでも、早稲田大学や京都大学はロープを「踏み越える」ため、重心が高い。
計量で東工大Maquinistaに思わぬトラブル。なんと重量が800gもオーバーしているという。「非常停止ボタンを2つ→1つに変更」などの調整により、テストランまでにはクリアしていた。
軽さで群を抜いていたのが、仙台高専名取キャンパスのMR2だ。プラダン製の外骨格ボディで、なんと重量6kgとのこと。前足には、ロープ超えのためと思われるウェイトが貼り付けられていた。
11:00オリエンテーション開始
開会式や、イベント全体の進行を説明するオリエンテーションが始まった。全メンバーが手を止め、フィールドに入る。すっかりセッティングを終え、美しく整理されたピットを見せてくれたのが、長岡技術科学大学。梱包箱の上部に置かれた壁掛け時計から、ピット作業への慣れが見える(ちょっと高専っぽい)。
ピットやロボットの準備が終わらず、焦りが見えるピットもちらほら出ていた。オリエン直前に到着したチームは、まだ開梱を始められていない。
12:30テストラン開始
東大がロボット調整のため(珍しく)テストランのトップバッターを逃した。東工大は重量調整に成功、ピットエリアのテストフィールドで試走を始めているが、どうやらエラーが出ている様子。
テストランで転倒・衝突したロボットは、調整が必要になる。しかし、目立った暴走や破壊で「どうしようもない」状態になっているチームは、ぱっと見る限りなさそうだ。想定していないエラーはないのでは?と思わされる余裕。
14:30審査開始
計量にパスした順番に、予選のためのロボット審査が始まった。審査の上位6校はシード権を得て、明日の予選チームでは重複対戦を避けて配置される。
東大は余裕で審査を終えた。MR2の挙動が2種類用意されているようだ。「スピードは落ちるが安定性重視」の動きと「安定性は欠くがスピード重視」の動き、両方を審査時間内に見せ、その後ピットでのNHKの取材にも笑顔で応じている。
一方、豊橋技術科学大学が審査のタイミングでトラブル発生。テストランで圧倒的な速さを見せたMR1・MR2が、ともに動作しない! 審査のあいだMR1はまったく動かず、MR2も途中でストップしてしまう。ピットでは、運搬中のミスや回路的な問題の洗い出し、回路を切り分けての検証などでピリついた空気が流れていたが、その後のテストランでは完全復活! シードは逃すが強さは健在だ。
はじめての「4脚自動ロボ」、スピード勝負の行先は?
今回のルール発表で、注目されるのは「4脚・自動制御」のMR2だろう。MR1の仕様はある種「おなじみ」の面があり、各校からいままでの技術の蓄積が見える。しかし、MR2はほとんどのチームにとって経験の浅い開発と言っていいはずだ。一般的に言って、ステアや慣れているオムニホイール等での自動制御より、制御の難易度は高いはず。
そんななか、初出場の慶應義塾大学は、完成度の高いクモ型(ここでは便宜的にそう呼ばせていただく)のロボットを仕上げてきた。久しぶりの出場となった京都大学は、早稲田大学とよく似た構造。過去の経験がアドバンテージにならない課題を出場校がどのようにクリアしてきたか、本戦を楽しみに待ってほしい。
事前情報によれば、出場チーム22校のうち、8割のチームが3分以内での「ウーハイ!」達成をしている。テストランの時点で20秒台のウーハイを見せるチームもあり、ロボットの完成度は全体的に高い。
25日17時現在、会場ではまだまだテストと調整が続いている。明日の本戦は、12:30開演だ。デバプラのTwitterやリアルタイム速報、NHKのストリーミングでもそこでしか得られないロボコニストトークが配信されるとのこと。






