NHK学生ロボコン2021出場校のロボット開発の経緯、コンセプト、自慢できるポイント、戦略などをまとめた「出場ロボット解剖計画」を4回に渡りお届けします。
第1回は、東京工科大学 プロジェクトRと早稲田大学 ROBOSTEPです。
お読みいただいた方にとって、これからのロボコンが楽しくなり、技術的なヒントが掴める一助となれば、これ以上うれしいことはありません。
お忙しい中ご対応頂いた各チームの皆様、ご協力頂き、誠にありがとうございました!
目次
東京工科大学 プロジェクトR
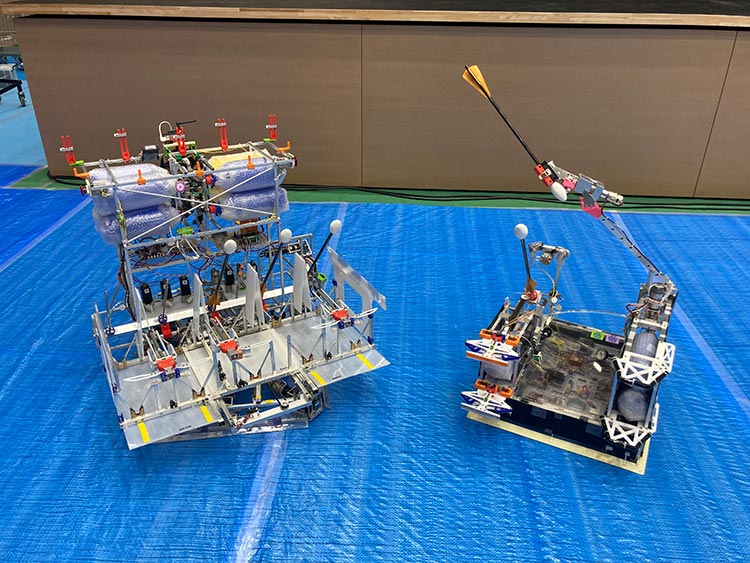
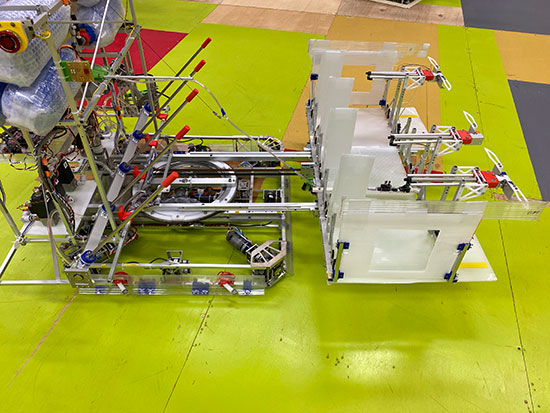
左:スローイングロボット
右:ディフェンスロボット
ロボットのコンセプト、設計思想を教えてください
TRは回収・投擲の再現度を高くすることと機構の簡略化を、DRは相手のⅠ型以外の全てのポットの妨害を可能にすることがコンセプトです。また,ハード・ソフト共に実績のある安定した物を取り入れるように努力しました。全て堅実に仕上げました!
参加した全てのメンバーが大会初出場なので、歴代の出場ロボットのノウハウを全力で生かしました。
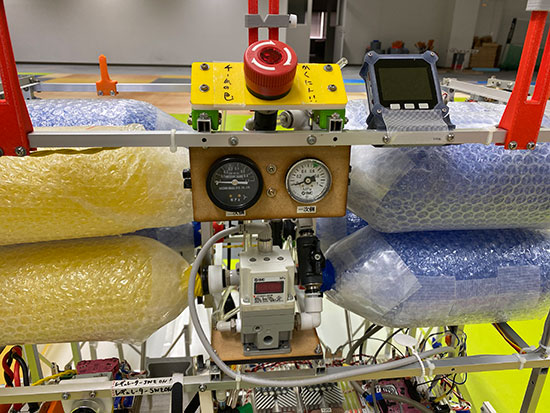
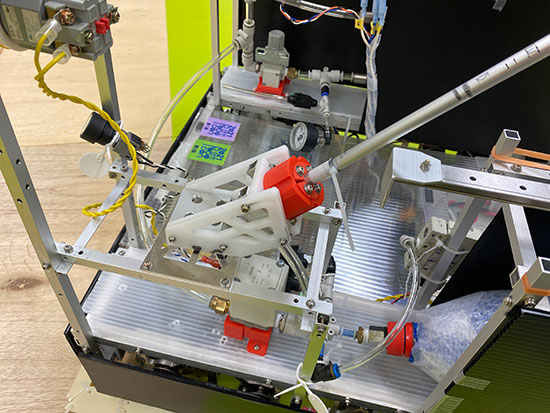
スローイングロボット”電空”レギュレータ
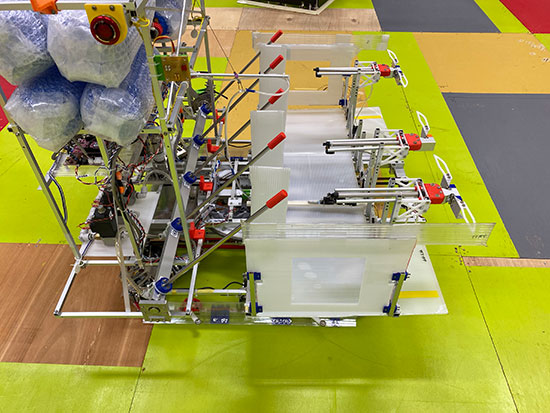
スローイングロボット 回収機構
スローイングロボット 仰角機構

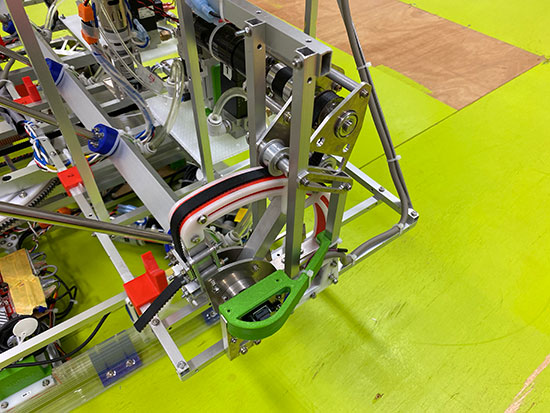
ディフェンスロボット 防御機構 回転部
ディフェンスロボット 防御機構
こだわったポイント、⾃慢のポイントを教えてください
TRは走行機構と投擲機構で別々に旋回可能になっていて,砲台のようなロマンあふれる見た目をしています。DRは矢の振り方を工夫しより効果的な妨害を実現したと同時に,落ちた矢が機体の裏側に巻き込まれないようバンパーを付けているのも特徴です。
学内での練習時には最高28点を記録しました。

スローイングロボット 照準器
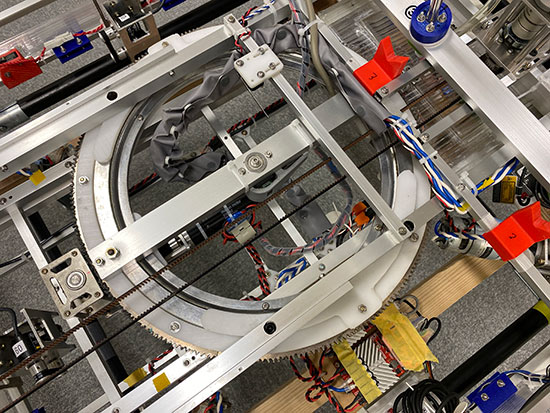
スローイングロボット 旋回機構
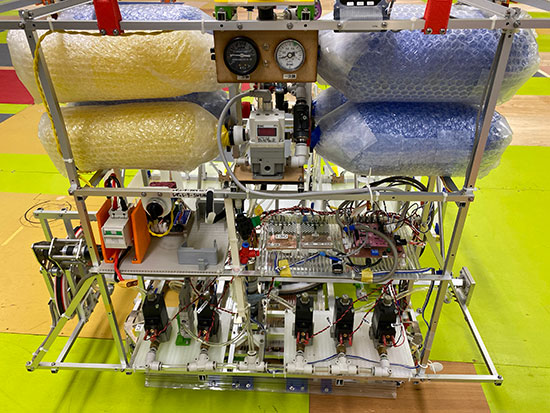
スローイングロボット 電装部
ディフェンスロボット 伸縮ハンド
ディフェンスロボット 発射機構基部
戦略について教えてください
戦略は敢えてグレートビクトリーを狙わず,得点力で勝利することです。
TRは正確無比な投擲を,DRは相手の得点を自チームより低く抑えるよう立ち回り、堅実に勝利を掴みます!
(試合ではお見せできませんでしたが,Ⅲ型ポットへの投擲も可能で実際にはグレートビクトリーも可能です)
特に重要なデバイス、パーツを教えてください
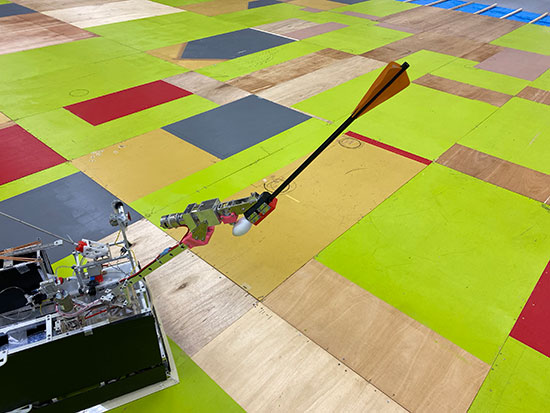
矢の発射パイプです。

スローイングロボット 発射電磁弁
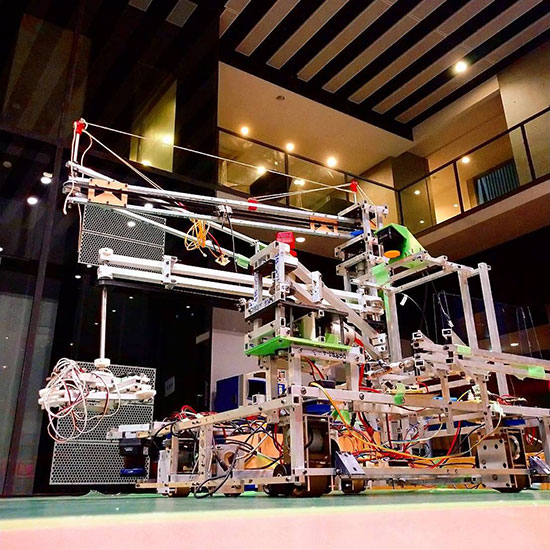
早稲田大学 ROBOSTEP

ロボットのコンセプト、設計思想を教えてください
TR:シンプルに
DR:僕たちの考えた最強の妨害ロボット
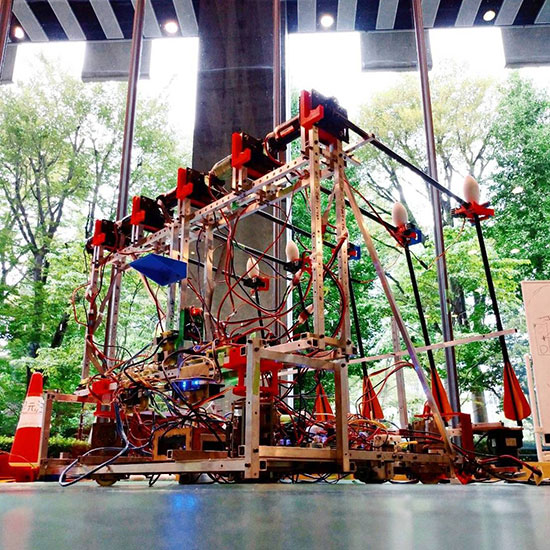
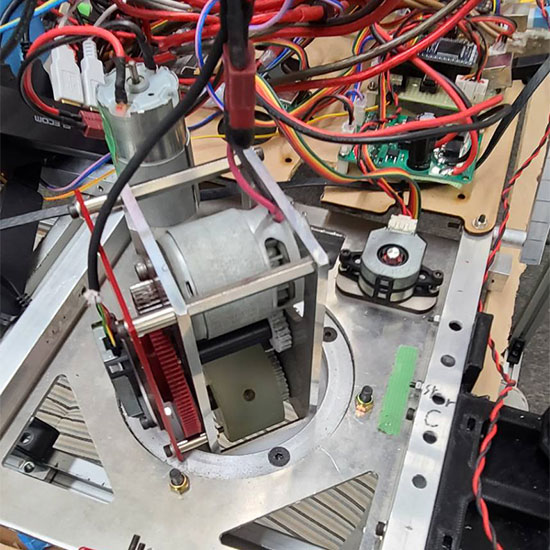
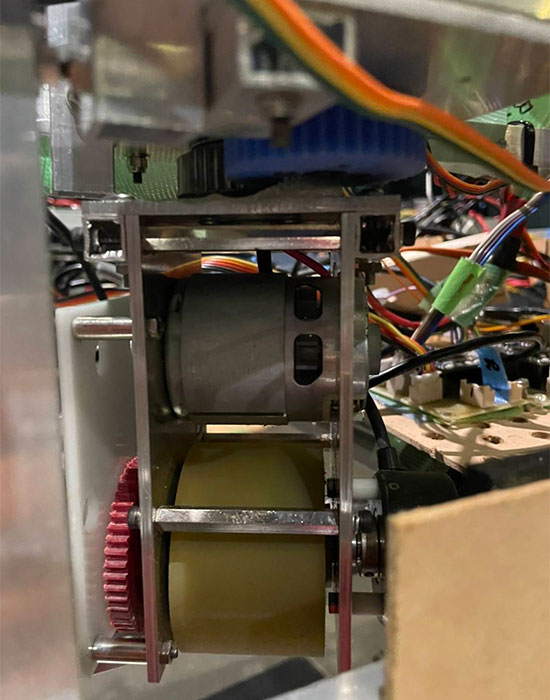
スローイングロボット
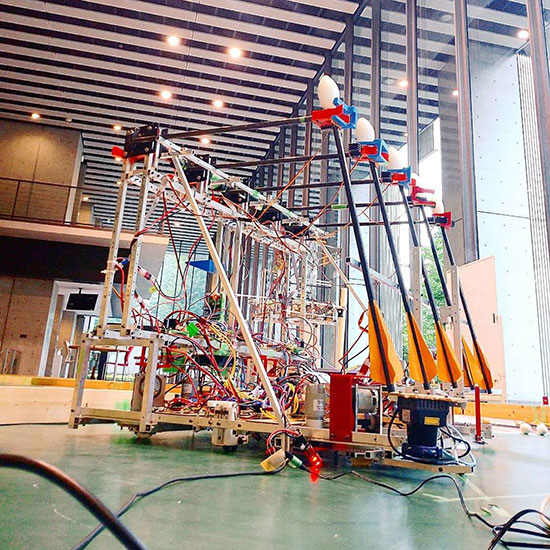
スローイングロボット

スローイングロボット
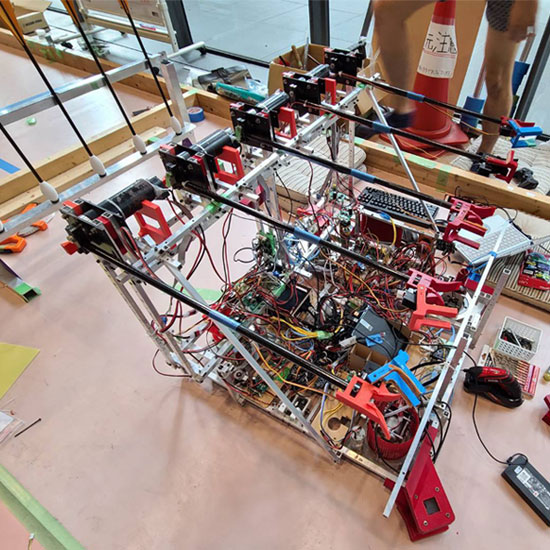
スローイングロボット
ディフェンスロボット

ディフェンスロボット

ディフェンスロボット
こだわったポイント、⾃慢のポイントを教えてください
スローイングロボット(Throwing Robot(TR))
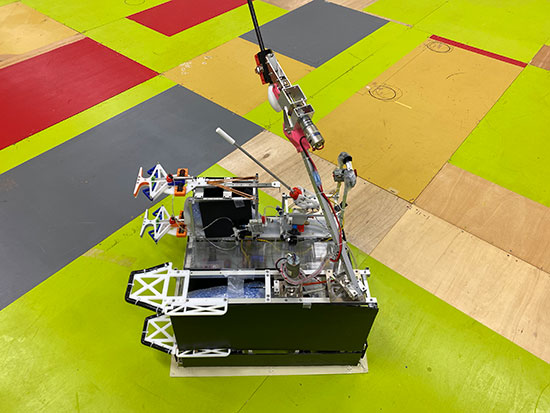
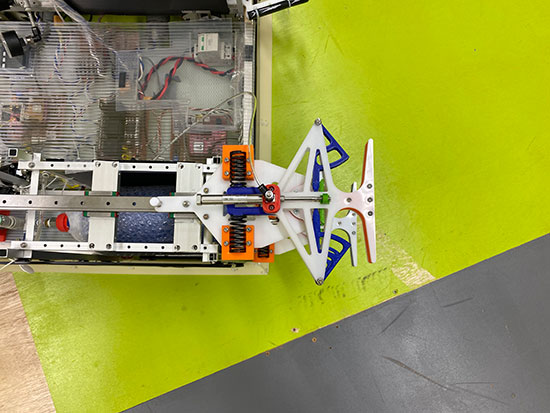
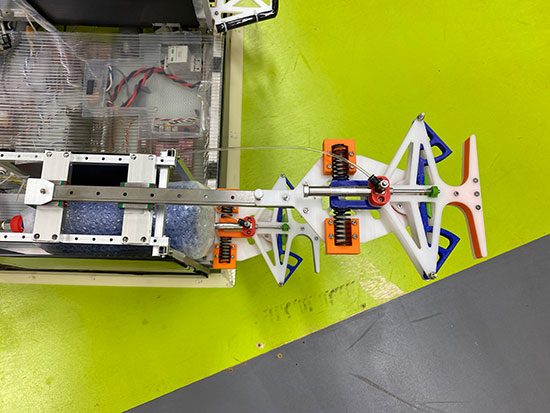
投擲機構に装填の機能も持たせることで、機構から機構への受け渡しを不要にしたシンプルな設計です。この投擲機構を5台搭載する事で、矢立から1度に5本の矢を回収して投げることを可能にしました。腕は矢のカーボンパイプを使っていて、矢で矢を投げます。
スローイングロボット
ディフェンスロボット(Defensive Robot(DR))
可動域180度のターンテーブル回転アームと、2m先まで展開し妨害できるスカラーアームを搭載しています。スカラーアームの先端についた矢を振り回して妨害する想定です。
ディフェンスロボット
戦略について教えてください
遠距離のポットへの投擲の成功率に不安がありますが、近距離のポットに対してなら自信があります。そのため、まずはTypeⅠポットと自陣側のTypeⅡポットを集中的に狙い堅実に得点を稼ぐ作戦です。この3つのポット全てにツインを各2回達成させた後は、残りの矢で敵陣側TypeⅡとTypeⅢポットを狙い更なる得点とグレートビクトリーを狙います。相手チームにグレートビクトリーを達成されてしまう事を防ぐため、DRは各種妨害機構を用いて妨害を行います。
特に重要なデバイス、パーツを教えてください
TRの矢投擲機構の腕部分に使われている、カーボンパイプです。速度を大きくし、制御性を高めるため、限界まで腕を軽くすることを目指しました。その結果、超軽量で高弾性であるカーボンパイプが最適と考えました。
カーボンパイプは矢の本体部分にも使われています。余っていた矢を分解して腕にも使いましたが、他の投擲機構よりも精度が良く、矢で矢を投げる機構として採用しました。






