はじめに
ドローンに興味があるけど、まずはあまりお金をかけずにはじめてみたい・・・そんな方には、この記事がおすすめです。なんと予算2,000円くらいと電子工作にチャレンジする精神があれば、小型の所謂クアッドコプターを完全自作することができちゃいます。これで高価なドローンを買う必要はなくなりますね。早速作り方を説明していく前に、ドローンを飛ばす際に注意すべき点をいくつか挙げさせていただきます。
今回ご紹介する方法でドローンを作成した場合、ドローンの重量は申請が必要になってくる200gを下回ると思います。ただ、申請が必要なくても(または申請が通っていても)、どこでもドローンを飛ばしていいというわけではありません。他人の所有地で飛行させる場合は必ず許可を取るようにしましょう。また、見落としがちなのが「電波法」です。本記事ではドローンの操作用に、免許や登録が必要ない2.4GHzの送受信機セットを用いていますが、それ以外の電波帯を使用する場合は免許や許可が必要になるので注意しましょう。詳しくは、こちらのページからご確認ください。
最後に、こうした小型で軽いドローンであれば何かあった時の被害も軽いはず・・・なんて考えてはいけません。ドローン事故の恐ろしさは本体の落下による衝撃だけではなく、高速で回転するプロペラも人や物に被害を与える可能性があるので、ドローンを飛ばす際はひらけた場所で周りに注意して飛ばしましょう。安全第一です!
それではまず、今回使用する備品から見ていきましょう。
備品
1. 小型モータ×4:電子部品の専門店で売っています。回転数400~500KVのものを選んでください。

2. モータジャケット×4:モーターの固定に使用します。

3. プロペラ×4:回転直径10cmがおすすめです。購入時には、モータ軸にぴったり合うことを確かめてください。
4. リチウムポリマー(リポ)バッテリー:300~500mAh 25Cの3.7Vバッテリーが1つあれば、10~15分の飛行時間に十分です。
5. バッテリー充電器:3.7Vバッテリー充電器。バッテリーと一緒に購入できます。
6. 2.4GHz送受信機セット:筆者は家にあったHY-JJH36基板を使いました。取付けてモータをつなげば送信機(コントローラー)から操作することができるようになりますが、この基板は日本では入手が難しいようです。手ごろなパーツがない場合は、小型のフライトコントローラーと対応したRCトランスミッターを使うことでドローンを操作することができます。リンクで紹介しているものは中身のファームウェアが既に書き込まれていますが、ものによっては自分でファームウェアを書き込む必要があるので注意しましょう。とはいっても、BetaflightやOpen Pilotといったドローンコントロール用のファームウェアは手順に従って操作するだけで比較的簡単に書き込めるので、自分でプログラムを書く必要はありません。また、フライトコントローラー部分にArduinoを使うことで自分の好きなように動かすこともできるので、このシリーズのパート②以降ではそうした方法もご紹介します。

7. ボールペンの替え芯×2:クアッドコプターのアームに使います。

8. 発泡スチロール:ここに回路を載せます。
9. テープ、グルーガン
組み立てよう
ステップ1
小型モータをジャケットに収めます。次に、プロペラ4枚を、各モータに取り付けます。後の工程で失敗しないように、プロペラはモータ軸にしっかり固定してください。

ステップ2
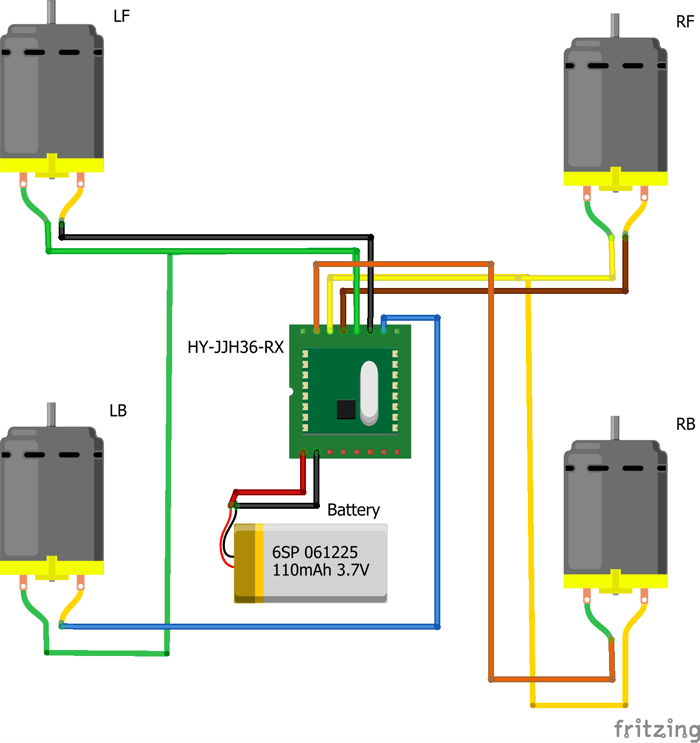
受信機用の基板(ここでは、HY-JJH36-RX)に、モータ4基を取り付けます。配線は次の配線図のとおりですが、この図に使われているのはFritzingソフトウェアの別のパッケージなので、以下のように読み替えてください。
➢ モータRF(右前方)
o プラス線(モータ側)->RF+ピン(RX基板側)
o マイナス線(モータ側)->RF-ピン(RX基板側)
➢ モータLF(左前方)
o プラス線(モータ側)->LF+ピン(RX基板側)
o マイナス線(モータ側)->LF-ピン(RX基板側)
➢ モータLB(左後方)
o プラス線(モータ側)->LF+ピン(RX基板側)
o マイナス線(モータ側)->LB-ピン(RX基板側)
➢ モータRB(右後方)
o プラス線(モータ側)->RF+ピン(RX基板側)
o マイナス線(モータ側)->RB-ピン(RX基板側)
ステップ3
リポバッテリー(ここでは、380mAh、25C、3.7Vを使用)を、次のように基板に取り付けます。
➢ プラス線(バッテリー側)->Vinピン(RX側)
➢ マイナス線(バッテリー側)->GNDピン(RX側)
ステップ4
発泡スチロールから、1辺5cmの立方体を切り出します。

ステップ5
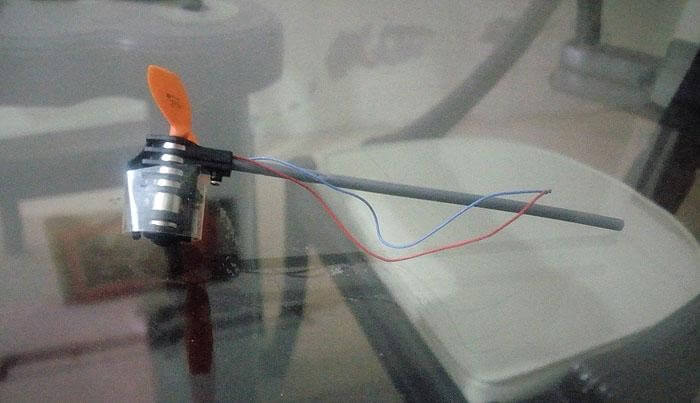
替え芯(ボールペンから取り出します)2本を、どちらも発泡スチロールの中心を通るように、突き刺します。

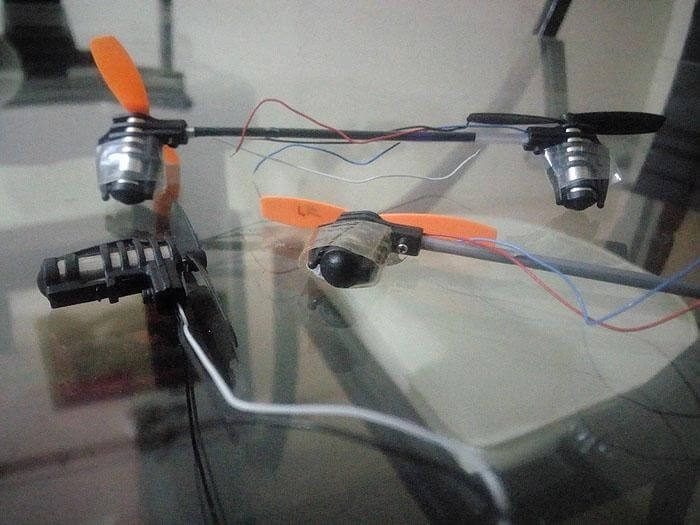
ステップ6
モーターを、ボールペン替え芯の両端に取り付け、ネジを締めます。テープまたはグルーを使って替え芯を固定します。
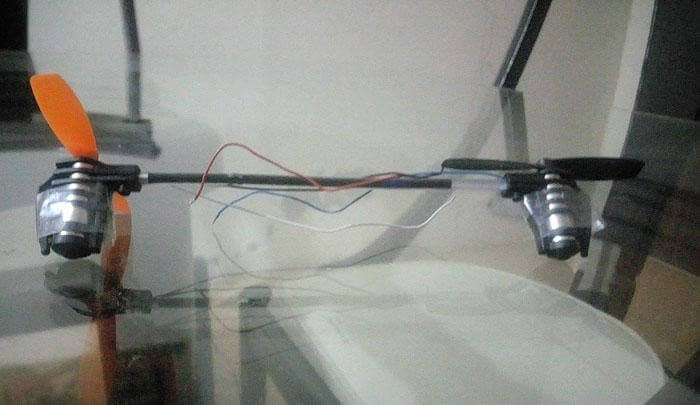
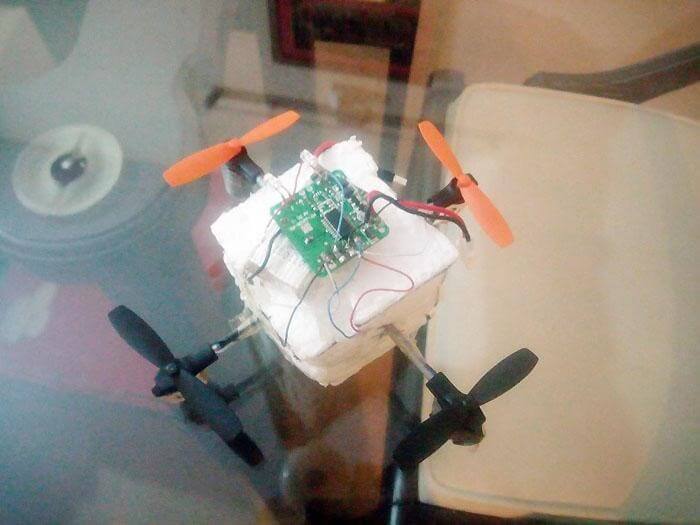
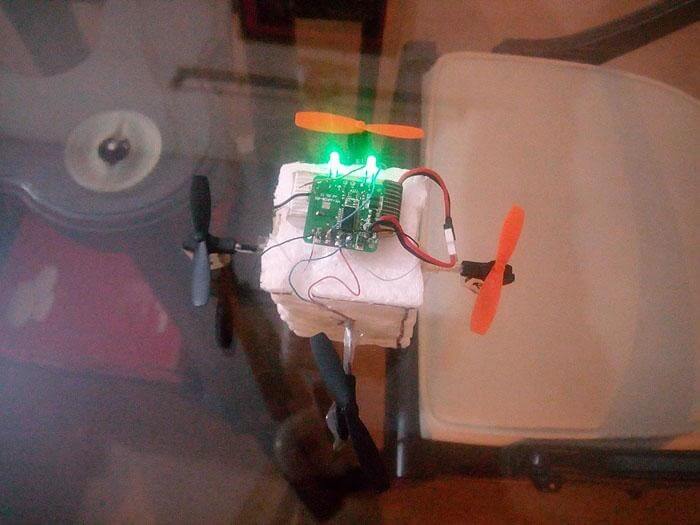
ステップ7
バッテリーを発泡スチロールの上に置き、その上にHY-JJH36-RXの基板を置いて、全体をテープまたはグルーで固定します。これで完成。いつでも飛ばすことができます。回路にバッテリーをつなぐと電源がつくので、コントローラーで操作できます。
注意とまとめ
この低予算自作ドローンですが、実際に飛ばしてみるとバランスをとるのが非常に難しく、なかなかコントロールが効きません。想定外の挙動を取ることに備えて、最初は広い場所で何度か飛行を試して様子を見るようにしましょう。
もう少しちゃんとしたドローンを自作したい!という方のために、次の記事ではもう少ししっかりしたフレームにArduinoをのせてフライトコントローラーとして回路に組み込む方法をご紹介します。
今回の連載の流れ
第1回:身近にあるもので低予算ドローンを作ってみよう(今回)
第2回:Arduino Nanoをフライトコントローラーとしてのせる
第3回:ArduinoとGPS機能で自動追尾させてみよう