部室、ではなくものづくり系サークル共同の作業場で作業
部室、ではなくものづくり系サークル共同の作業場で作業
開発現場に徹夜はあたりまえ?
──それでは、前編に続いてロボットについて教えてください。開発はスムーズでしたか?
三宅:いや~~、何度、日の出を見たことか……。
──そうですよね(笑)。バドミントン、と聞いた時はどうでしたか?
三宅:「え?」って。
島:「何をバカなことを言ってるんだ」って(笑)。
花尻:それで次の日に集まって、まずはアームみたいなものを考えました。京都工芸繊維がやっていたような、ラケットを振る腕を作る、ってことです。我々は3軸でしたが。
島:でも、その方式だと自動化が前提で。
三宅:そうそう、一応アームもできて制御もできたんですが、キネクトが……。精度が出ないし、それならラケット3本にするかって言っても、アームには荷重的にムリだし。
──そのテストはどのくらいまで?
三宅:11月ぐらいまでやってましたかね。最初は普通の380モータでやっていて、それがダメでラジコンのサーボにしちまえ、でもそれじゃゼンゼン飛ばない……、となって、段々今のスプリング+エアというラケットスイングの方式になってきて、4月の最初にでき上がったという感じです。本当は3月から練習したかったんですよね。春休みですし。
──どんなふうに、開発をすすめたんでしょうか。
三宅:例えば、4日間で設計部門が機構を設計して、加工して、組み立てて、それを電装班に渡して、1日で「動かない、できない」って突っ返されて(笑)。そんなサイクルでしたね。そういう試行錯誤は想定していましたが、本音を言えば、あそこまで苦労するとは思いませんでした。ずっと「次、どうしよう、これで動かなかったら、飛距離が出なかったら後はない」なんて思ってました。5徹(夜)とか平気でしてました……。
──それは大変……。なぜそこまでできたと思いますか?
三宅:でも、楽しかったです。ロボコンに出たい、優勝したいというのは、小学校ぐらいの時から思ってましたから。
花尻:僕も同じです!
島:僕は、そこまでじゃないけど……ハイ、スミマセン(笑)。
 ROBOSTEPのモノは、共同スペース一角、8畳ほどの場所に整頓
ROBOSTEPのモノは、共同スペース一角、8畳ほどの場所に整頓
目指したのは、最速マシン
──今回の機体のポイントはどこでしょう?
三宅:まずは後衛機、主にレシーブをする方の足回りでしょうか。やはりスピードです。マクソンの交流、250Wを使っています。巻き込まれたら指がつぶれる、ってレベルですよね。これはやっぱり重くなるのと制御に苦労しました。このモーターの最速を出すために大枚をはたいたのに、最速を出そうとすると暴走させてしまう。
でも、最終的には全方位動ける機体の中では最速だったんじゃないでしょうか。豊橋のメカナム+“掃除機”マシンには及ばなかったかもしれませんが。
島:東大のタイヤにも、加速度的には……。でも、他の機体がコートを分担したりしている中、この後衛機はコートの2/3以上を駆け回れるんです。まあ、相当に操作のウデがいりますけどね。ちょっとやってみたらすぐわかりますが、よくこんなものがコントロールできるな、って。
──その操作性、という点ではどうですか?
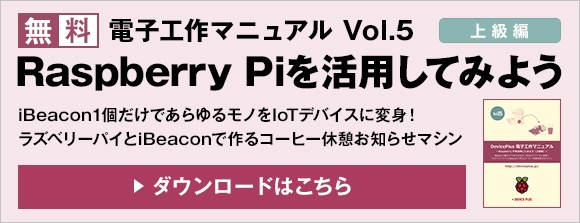
三宅:コントローラーで、機体の加速度の調節ができるようになっています。“何秒で最高速に達するか”みたいなことですね。テストランの時、実際のコートで試してみると、ここで練習していたときよりすごくのっぺりとした動きになったんです。それで、2回目のテストランの時、加速度を跳ね上げたんです。大阪との対戦形式のテストランでしたが、相手そっちのけでこの調整をしていた、っていう……。すみません、失礼でしたね(笑)。でもそれだけ、この仕組みは有効・重要でした。
島:モータードライバのプログラムは、かなりいじりましたね。
 操作する三宅さんは、その細かい仕組みを気にしていなかった。それでも有効だったのだから、デキが良いと言っていいだろう
操作する三宅さんは、その細かい仕組みを気にしていなかった。それでも有効だったのだから、デキが良いと言っていいだろう
──前衛+サーブ機はどうですか?
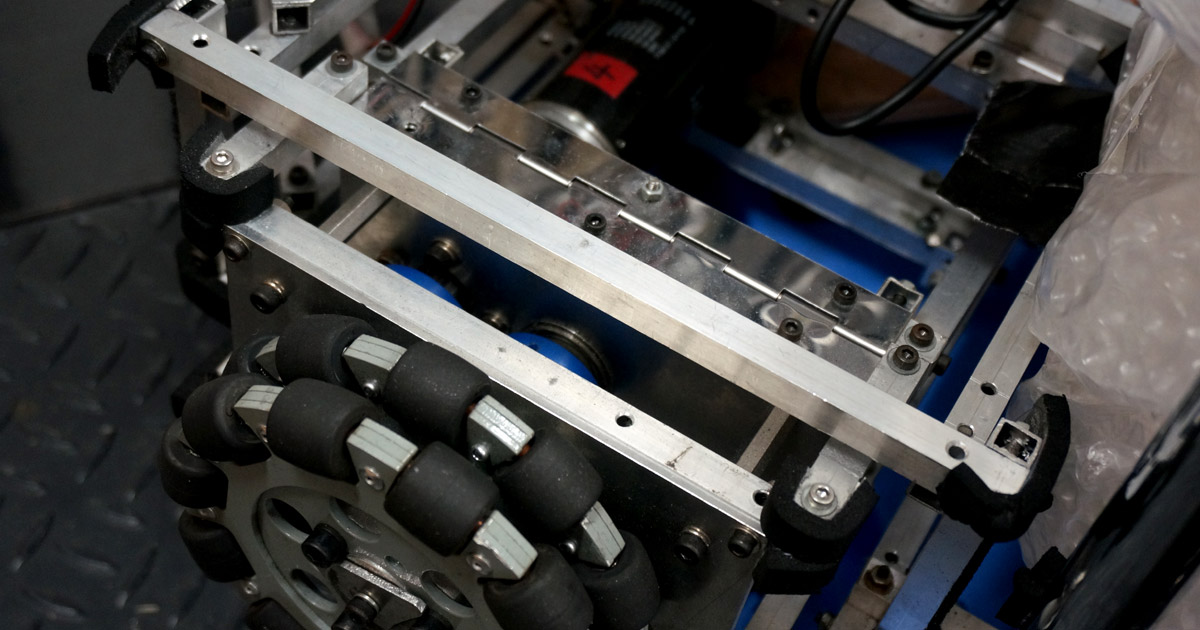
三宅:低弾道のシャトルを打ち落とす、もしくはスマッシュする狙いでしたが、前衛、という意味ではあまり活躍できませんでしたね。こちらのポイントは、やはりどうしても重心が高くなることでしょうか。その対策のひとつは、ラケットのスイングの機構です。普通だったら、エアシリンダーがラケットのそば、高い位置になると思います。しかし、ワイヤーを一段噛ませることで、シリンダーの位置を下げ、重心を下げています。それで、機敏に動けるようにしたつもりです。ワイヤーでは細かい制御はできませんが、動けばいいや、という感じだったら便利ですよね。アームの先にアクチュエータを設置する必要がありませんから。うまく使えば、いろんなところで活躍してくれるんじゃないかな、と思っています。
 シリンダーは機体中央にあり、ラケットにワイヤーで接続
シリンダーは機体中央にあり、ラケットにワイヤーで接続
──もうひとつ、があるんですか?
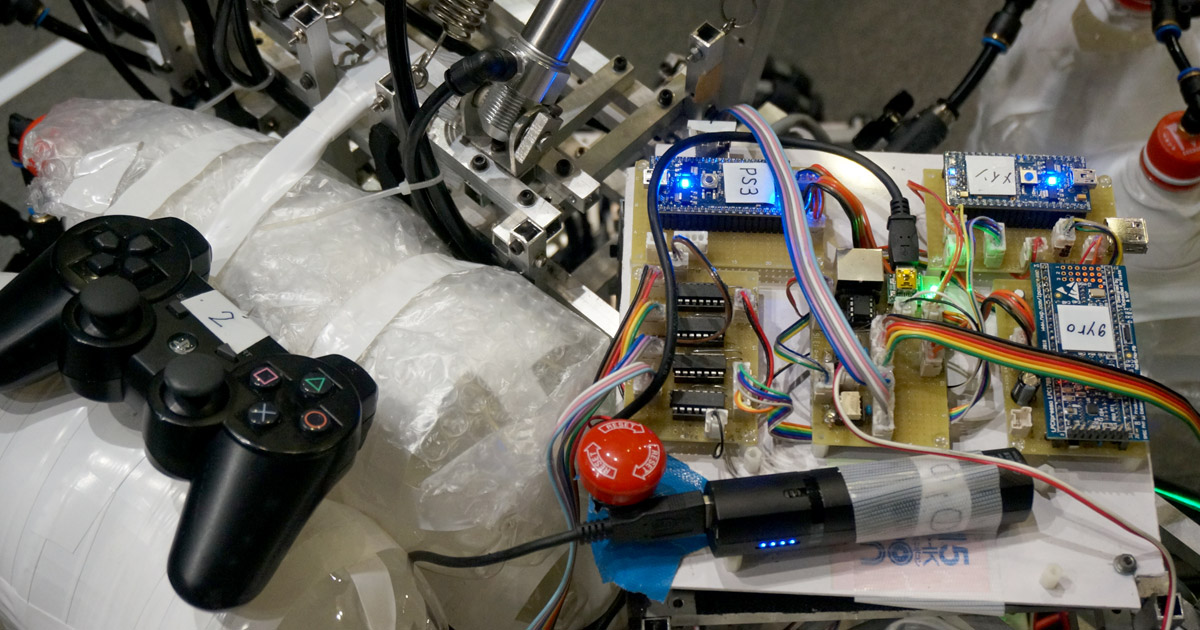
三宅:はい、足回りです。重心が高いものを機敏に動かそうとすると、オムニホイールが浮いてしまう。それで、ちょっと変わっているかもしれない足回りになっています。なんというか、蝶番を仕込んで、フォーミュラカーのサスペンションのような動きをするようになっているんです。これで、多少床がデコボコしていても、機体がゆがんでも、まっすぐにホイールが接地するようになります。
 蝶番が見える。このスペースに入るのは、この仕組みしかなかった、という判断
蝶番が見える。このスペースに入るのは、この仕組みしかなかった、という判断
──サーブはどうでしょうか?
三宅:微妙なところですが、スイッチで、強弱を調整できるようになっています。エアタンクの残量でサーブの強さが変わってしまうので、その調整の意味もありました。
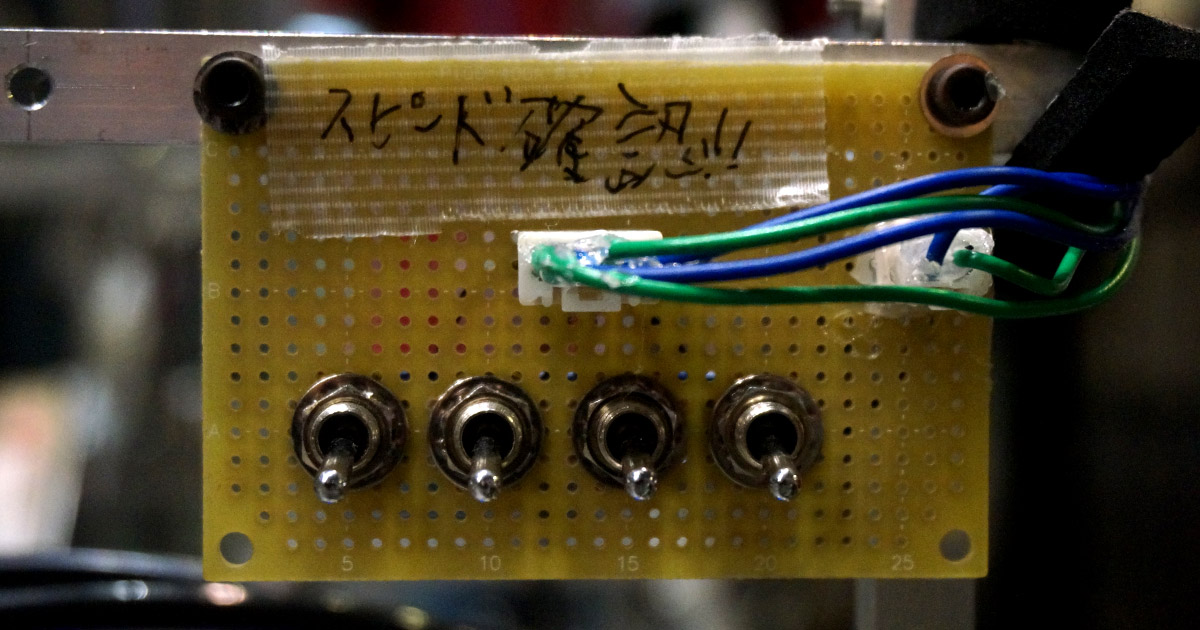 これがそのスイッチ。微妙な調整が可能。
これがそのスイッチ。微妙な調整が可能。
ABUに向けて改良中
──今は、何か改良は加えていますか?
三宅:島君が、NHKでは使えなかったLRF(レーザレンジファインダー、レーザ測域センサ)を改良しています。初戦の時のように、ネットに突っ込まないように。あれでちょっと機体がゆがみましたからね。
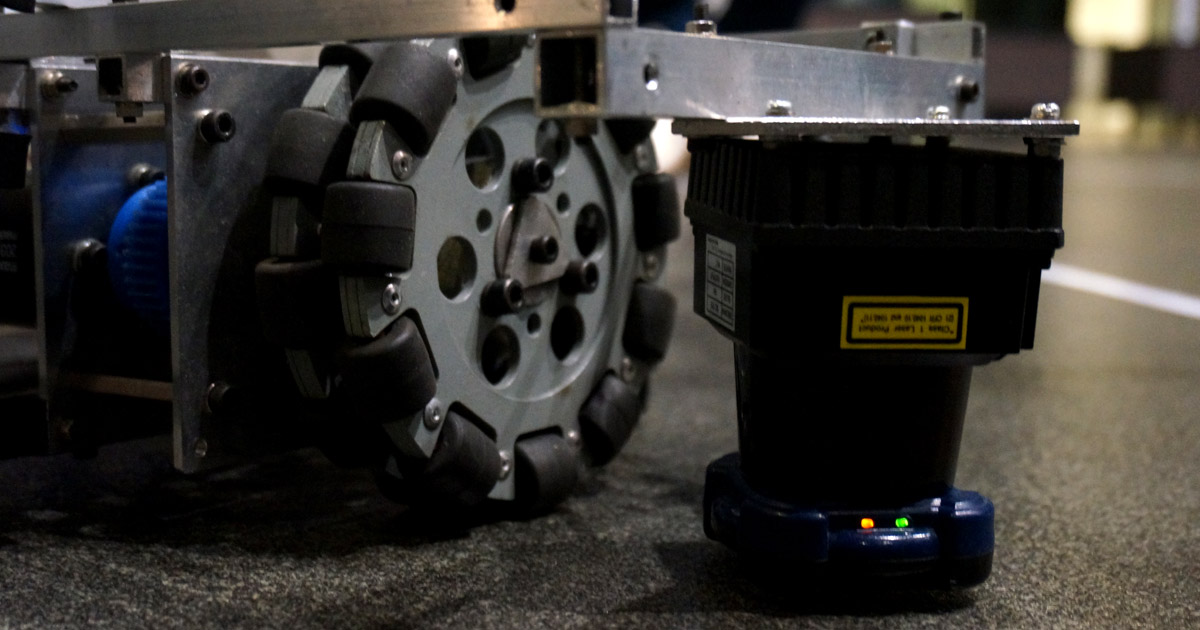 低い位置に設置したLRF。果たしてインドネシアで機能することができるか?
低い位置に設置したLRF。果たしてインドネシアで機能することができるか?
島:LRF、あまりにも障害物がないと、精度が下がるようです。今は機体の最下部につけて、グレーのコートのワクを捉えるようにしています。ただ、ちょっと自信ないので……、LRFを使わなくても操作できるように練習もしています。
三宅:あとは、中国のリターンがずいぶん深く返ってくるようなので、その対策として、飛距離を出すために空気圧を上げたり。タンクを追加して、コックを設けて、試合を通して気圧を平準化できるようにしています。
──なるほど。あとはやはり、剣道と同じようにひたすら練習?
三宅:はい! もちろん!!!
インタビューの後、少しだけ練習の様子を収めようと、カタチだけの練習を始めてもらったところ……、すぐにアツくなって、本格的な練習に移ってしまったみなさん。この勢いなら、インドネシアでもきっと活躍してくれるだろうと確信した取材チームであった(笑)。
もちろんそのインドネシアABUロボコンも、デバプラではきっちりとフォローする予定。大会当日(日本時間8月23日11時〜)はTwitterでも実況中継します。お楽しみに!
前編はこちらからどうぞ!
学生ロボコン2015優勝校 早稲田大学。そのヒミツに迫る!〜チームメンバー編