2017年6月11日に大田区総合体育館で開催されたNHK学生ロボコンは、東京工業大学チーム「Maquinista(マキニスタ)」の優勝で幕を下ろした。
今回のテーマ「The Landing Disc」におけるキーワードは”柔軟性”であったと言えよう。ディスクの誤差は大きく、そして対戦相手は様々な妨害をしてくる。勝つためには、自チームのマシンポテンシャルはもちろん、事前の作戦や対戦中の柔軟な判断などといった「チーム全体の勝負強さ」が必要とされていた。このゲームを制して初優勝を飾った東工大は、一体どのようなチームなのだろうか。
今回デバプラ編集部は、東工大の活動拠点にお邪魔することにした。ロボット開発の経緯や試合当日の振り返りを通して、勝利の秘密に迫りたいと思う。
チャンピオンマシンを生んだ「ロボット技術研究会(ロ技研)」の部室、どんなところ?
東工大ロボコンチームはロボット技術研究会のなかの1グループ。
そんなロボット技術研究部の部室にお邪魔させてもらった。が……せ、狭い。

狭いところの幅は、大人がやっとすれ違える程度。
おそらく20平米くらいはありそうだが、両壁に試作機や工作素材などがぎっしりと並べられていて、ロボコンチーム全員がここに入るのも大変だろう。これをロボット技術研究会全体でシェアしているのか
床に置かれた3Dプリンタには「安産祈願」の御札が貼られている。過去の勝利を記念した表彰状たちは、「場所がない」という理由で、なんと天井に画鋲で直止めされていた。

天井に所狭しと貼られた賞状。最高にクール。
表舞台に出なかったメカたちの功績

南2号館の「ものつくり教育研究支援センター」、この奥に広い工作室がある。
実際に作業をしているのは、部室から徒歩10分程度の場所にある「ものつくり教育研究支援センター」。ここに優勝マシンが置いてあった。
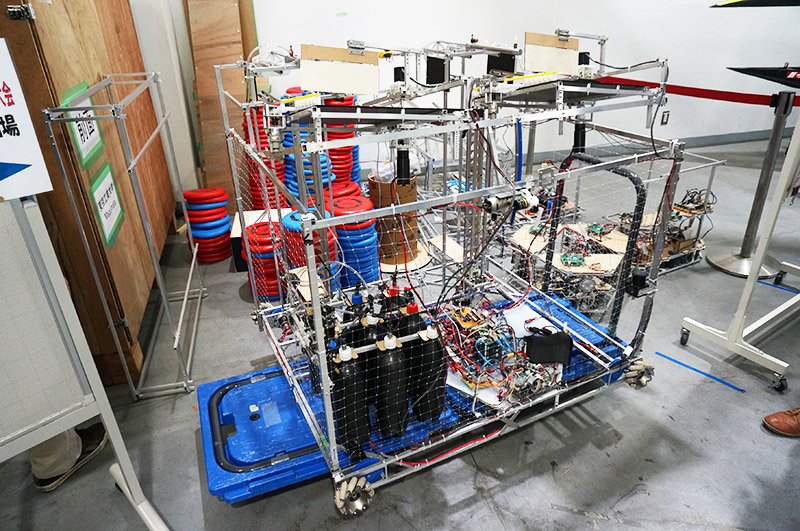
NHK学生ロボコンの結果を参考に、すでにアップデートが始まっていた。
工作室には、完成形のマシンにたどり着く前の試作機たちも保管されていた。ボツになった機構や、表舞台に出なかった試作品たちからは、開発チームの試行錯誤がにじみ出ていた。
- バット打ち出しタイプ 2機
- ローラー射出タイプ 2機
- 重ね投げタイプ 3機 スプリング2、板バネ1
- アームで挟んで横方向にスローイング 2機
- ディスクで挟んで縦投げ 1機
- これらを乗せて試すための台(もしかして一番活躍したのは、この台では?
チームメンバーから出たアイディアは、ほぼ全て実際に試作品を作り、その中でも精度の高いものを選定。さらに改良を重ねていったそう。
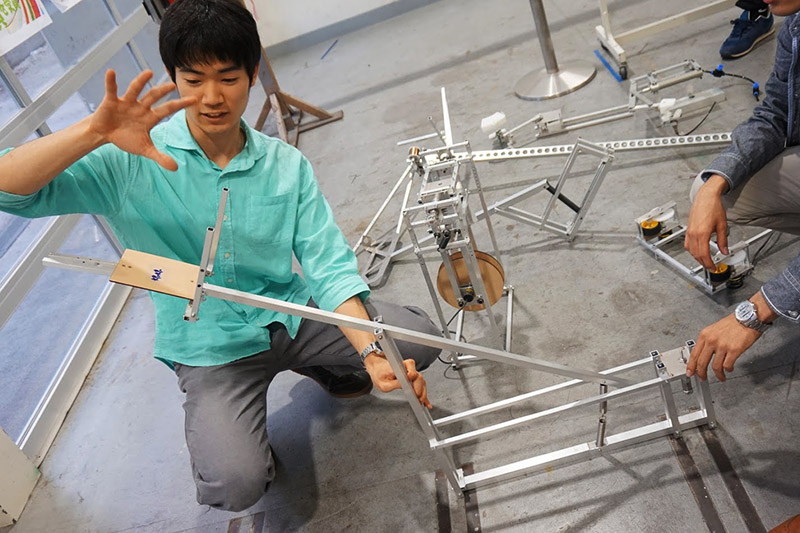
説明しているのは、スプリングで打つ重ね投げ機構の試作品。奥に見えるのが、ディスクで挟んで縦に投げる機構
最終的に採用された打ち出しバットは、直線と「クロソイド曲線」を組み合わせた特徴的な形状をしている。直線のバットは手前のスポット用。曲線部分は、打ち出しの映像を見ながらクロソイド曲線のパラメータを変え、遠方のスポットに確実に届くようチューニングしてある。

試行錯誤の結果たどり着いた曲線。機能美を感じる。
「当たり前のこと」「想定内だった」の連続、冷静すぎるチームインタビュー

左から、谷さん(操縦者)、森永さん(チームメンバー)、徳田さん(ピットクルー)、石原さん(ピットクルー)、山田さん(プロジェクトマネージャー・ピットクルー)
ここからはインタビューを通して、チームとしての強さの秘密を聞き出したいと思う。
――一番緊張したのは、どの試合でしたか。
谷: 初戦予選・千葉大戦です。本戦で使われたディスクが、練習で使っていたものより0.25mm厚かったんです。それでテストランのときは打ち出し部へのセットがうまくいきませんでした。厚みのバラツキは想定済みで、マシンの装填機構もマージンをとった設計をしていたので、本戦までにあわせこみはできましたが、それでも初戦は怖かったです。それ以降は、前の結果からマシンを調整していったので、正直「いけるな」という思いはありました。
山田: 合わせ込みを早く完了させるために、今年はテストランフィールドでの時間を最大限に生かすということを戦略として考えていました。そのためにチェックシートを作り、必要なタスクを可視化し、当日会場で誰が何をするかを明確にしたことで、スピーティーに処理することができました。

今年から導入したという当日のタスクスケジュール表。慌ただしいマーキングから、当日の忙しさがうかがえる
――東工大は今年、初優勝という躍進を遂げましたが、去年と比べてチームはどう変わりましたか。
山田: 今年は二次ビデオ審査後にロボットを大幅に作り直すのはやめ、機体をそのままアップデートしました。さかのぼって作り直すとそれに時間がかかりすぎて、完成度を上げきれないという問題があったためです。また、練習場を増やすために学校側に交渉するなど、周りを巻き込んで練習環境を整備することにも力を入れました。去年までは運動部の体育館を土日に借りるだけで、どうしてもできることが限られていました。ずっと、なんとかしたいという考えはあったのですが、なかなかうまく確保できなくて……。交渉の努力と先生のご理解もあり、今年に入って新しく2箇所を確保することができ、平日も練習ができるようになりました。これにより練習量が圧倒的に増えたことは、大きかったと思います。
――もっと変えたいものってありますか開発環境とか、組織体とか。
石原: 部室……。
全員: 笑
石原: 他大学と違って、我々は独立した「ロボコン部」ではないんです。ものつくり研究を行う「ロボット技術研究会」のなかの「ロボコングループ」です。部室が狭いこともあり、活動のしづらさも少しはあります。ですが、ロボット技術研究会のなかで、予算をシェアして購入したいろいろな設備を使えるし、ドクター課程の先輩にアドバイスしてもらうことも可能です。研究会のなかで年2回の報告会があり、そこで情報交換や技術の継承もできます。大規模なサークルがゆえのメリットもたくさんあります。
――さきほど工作室で見た感じでは、本会場で見たロボットの機構は、ほぼすべて試しているように思いました。検討していなかった機構や、戦略面で想定外だった部分はありましたか。
谷: 農工大のボール打ち出し機構以外は、すべて想定内だと思います。シートで打ち出す工科大機構もアイディアとしては出ました。試合中の戦略は、練習のなかで自然に決まっていきました。練習後のミーティングで、先輩後輩の関係を気にせず、全員が気づいた点を指摘していった結果です。農工大戦準決勝第2試合でディスクが乗ったスポットのボールを無視したときと同じことが練習でもあり、「こういう場合はボールを落とさないで次のスポットを狙いに行く」というのも決定済みでした。工科大戦予選2戦目は負けでしたが、あれも想定はしていました。
森永: 負けるとしたらあの形だろう、と思っていました。
――冷静ですね……試合中、慌てることや焦ることはなかったのですか。
谷: あまりなかったですね。当日、操縦を担当していましたが、基本的にどこのスポットを狙うかなどの判断は、二人の指示に従って操縦します。なので、僕は操縦に専念することができました。ディスクが落とされたときなど、会場の声で気づくこともあります。
森永: 迷ったときは先に言った方の判断に従う感じです。
――優勝が決まった瞬間はどう思いましたか。優勝が決まった瞬間に、操縦者の谷さんがまず「ロボットの電源を切った」のはネットでも話題になっていましたね。
谷: マシンから離れて皆のところに行きたかったので……。マシンから離れるときは電源を切る、というのは当然のことです。
徳田: ピットクルーはとりあえずロボットを片付けようかなと……。
――本当に冷静ですね……。
フィールドのメンバーとピットクルーの分業も鮮やか。
――メンバーのタスク配分や進捗管理はどのようにしていましたか。
山田: タスクが生まれたときに、やりたい人が手をあげてとっていきました。手の空いた人が得意なタスクを率先して処理することで、全体を効率よく進めていきました。
徳田: 制御班はそれなりに分業されていました。
谷: 大変な仕事といえばフィールドですが、今回はフィールドも加工機で作れるものだったので、去年よりは辛くなかったです。
森永: 対面でのミーティングの他、チャットやブログなどのツールを活用し、常にそれぞれのタスクの進捗状況をメンバー全員が共有できるような仕組みをつくり、忙しくてもコミュニケーションがスムーズにとれるようにしています。実は数年前に、今までの蓄積してきた過去のデータが全て消えてしまうということが起こったんです。なので、今年になってようやく管理の仕組みが整ってきたという感じです。
――他校の持っていたもので、自チームにほしいものは。
山田: 足の速さです。他国はAPPARE!がとても速い。いまの我々では太刀打ちできません。現時点での最速は農工大戦1分15秒ですが、ABUまでには1分を切るタイムを目指したいです。NHKでは一敗してしまったけれど、ABUでは無敗ですべてAPPARE!を決めて勝ちたいです。
まとめ
8月のABUロボコンに向けてお忙しい中、インタビューに答えてくれた皆さん。ありがとうございました
東工大チームでは、当たり前のことを当たり前にこなすというメンバー全員の日々の積み重ねが、当日の安定した強さを下支えしていたように思う。また風通しの良いチームの雰囲気もさることながら、それぞれの強みを生かして動ける組織の仕組みが運用されていた。
- 全員が課題と結論を共有する
- 年次にかかわらず意見を出し、いいアイディアはきちんと採用される
- 手の空いた人が率先して得意なタスクを処理する
- タスクの進捗状況を全員で把握できるツールをうまく活用したコミュニケーション
これらは、言うだけなら簡単なことだ。しかし、この仕組みを活用してプロジェクトを完成させるには、メンバー全員が仕組みとツールの特性を知り尽くし、適切なリテラシーをもって使いこなさなくてはいけない。その能力をチームメンバー全員が持ち、しかも「特別でもない、当たり前のこと」と認識しているのは、それ自体がかなり凄いことなのだが……。
技術を引き継ぐのは、結局は「人間」なのだ。小手先の組織論では模倣できない、各個人の意識と能力の高さを目の当たりにした一日だった。