エンジニアライフにプラス1の情報を
ロボットやセンサを使ったものづくりで「その場で判断できるAIを入れたい」と思ったことはありませんか?クラウドに頼らずデバイス単体で動く「エッジAI」は、IoT開発の現場でますます重要になっています。
本記事では、エッジAIの基本から課題、そしてロームの「Solist-AI™(ソリストエーアイ)」で何ができるのかをわかりやすく解説します。
クラウドAIとエッジAIの違い(学習と推論)
AIの処理には大きく分けて「学習」と「推論」の2つのフェーズがあります。学習は大量データからモデルを作る工程であり、推論はそのモデルを使って判断する工程です。従来のAIでは、これらをクラウド側で処理するケースが一般的でした。しかしロボットや現場機器では、通信遅延やネットワーク依存といった課題があります。
そこで注目されているのがエッジAIです。推論をデバイス側で行うことで、通信に依存せずリアルタイムに判断できる「その場で考えるAI」を実現できます。

エッジAIに求められる要素と課題
エッジAIは非常に有用ですが、実際の実装には多くの制約があります。まず現場処理ではリアルタイム性が求められ、遅延は許されません。また通信環境に依存しない動作も必要です。さらにセキュリティの観点からデータをクラウドに送れないケースも増えています。加えてバッテリー駆動機器では低消費電力も重要です。これらをすべて満たすためには、小型かつ低消費電力でありながらエッジに適した処理能力を持つAIが必要となり、ここがエンジニアにとって大きな課題となっています。

Solist-AI™とは?
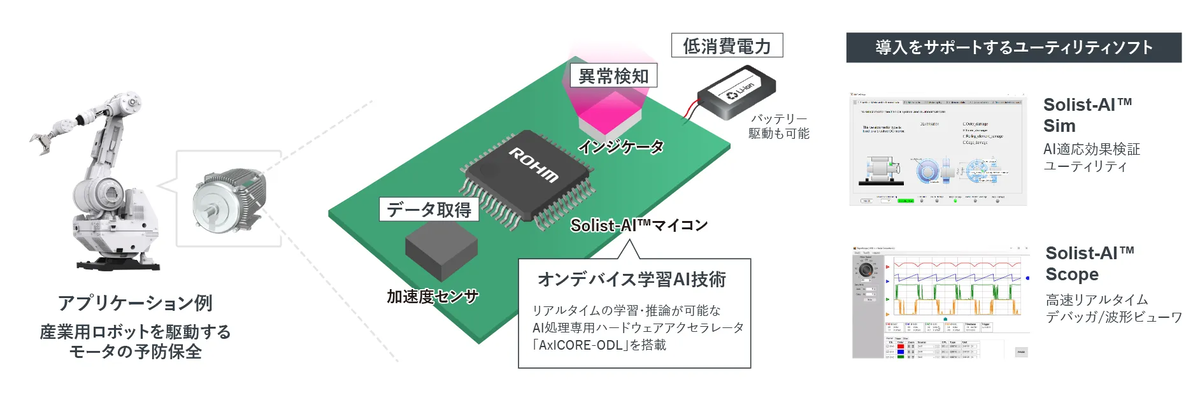
こうした課題に対してロームが提供するのが、エッジAIソリューション「Solist-AI™」です。Solist-AI™の特長は、「学習」と「推論」の両方をデバイス上(オンデバイス)で実行できる点にあります。一般的なエッジAIではクラウドで学習したモデルをデバイスに持ってきて推論だけを行うケースが多く、環境変化に弱いという課題がありました。一方、Solist-AI™は現場で取得したデータを用いてその場で学習し、環境に最適化されたAIを構築できます。これにより、振動や温度、電流などのセンサデータから「いつもと違う状態」をリアルタイムで検知することが可能です。

>>Solist-AI™ソリューションの詳細はコチラ | ローム株式会社
Solist-AI™の特長
Solist-AI™は、エッジAI開発において「現場で使えるAI」を実現するための特長を備えています。オンデバイス学習により、設置環境の違いや装置ごとの個体差にも柔軟に対応できるだけでなく、クラウド連携を前提としないため、低遅延・ネットワーク不要・高セキュリティを同時に実現できます。また超低消費電力設計によりバッテリー駆動機器にも適用可能であり、リアルタイムでの異常検知を安定して実行できます。さらにユーティリティソフトと評価キットが用意されているため、手軽にエッジAI開発を始めることが可能です。
「ROHM EDGE HACK CHALLENGE 2026」開催
ロームは、今年エッジAIをテーマとした開発コンテスト「ROHM EDGE HACK CHALLENGE 2026」を開催します(前段Solist-AI™デバイス提供キャンペーンを4月末から、本線のコンテストを7月から実施予定)。本コンテストでは、Solist-AI™デバイスを活用したプロトタイプ作品を募集し、社会課題の解決や新しい価値創出につながるアイデアを競います。ロームはこれまで2016年から2019年にかけて「ROHM OPEN HACK CHALLENGE」を開催し、多くの革新的な作品と出会ってきました。本コンテストはその取り組みを発展させ、エッジAIという新しい領域で実施するものです。

>>過去“ROHM OPEN HACK CHALLENGE 2019”の概要はコチラ | ローム株式会社
Kyoto Micro Maker Faire 2026にも出展
2026年4月26日に開催される「Kyoto Micro Maker Faire 2026」にロームも出展予定です。当日はSolist-AI™を活用したデモ展示などを予定しており、実際の動作や活用例を体験することができます。エッジAIに興味のある方や、実際に触れてみたい方にとってよい機会となるはずです。
まとめ
エッジAIは、AI時代のものづくりにおいて重要な技術のひとつです。Solist-AI™は、そのエッジAIを誰でも手軽に試せるソリューションとして、開発のハードルを大きく下げます。また「ROHM EDGE HACK CHALLENGE 2026」は、その技術を実際のプロトタイプとして形にできる場です。エッジAIに興味のある方は、この機会にぜひ挑戦してみてください
関連記事

Solist-AI™で広がる“その場で学ぶAI”の可能性、「ROHM EDGE HACK CHALLENGE 2026」に向けたアイデアソンを開催
Solist-AI™の特長や活用事例を学びながら、技術を活かした革新的なアイデアを生み出す場として、「ROHM EDGE HACK CHALLENGE 2026」連動のアイデアソンが開催されました。

デバプラについて
Device Plus(デバプラ)は、半導体・電子部品メーカーのロームによる、ものづくりを愛するエンジニアやエンジニアを目指す方々に情報をお届けするWebサイトです。
フォローして更新通知を受け取ろう
索引ページ
最新記事

東海北陸ロボコン交流会レポート 実践的な知識を持ち寄り、エンジニアの「地力」を鍛えたい
技術勉強会やブース展示を通じて、参加者が積極的に交流する東海北陸ロボコン交流会。ルーキーエンジニアたちが実践的な知識を学びあい、等身大の悩みをシェアしました。
Solist-AI™で広がる“その場で学ぶAI”の可能性、「ROHM EDGE HACK CHALLENGE 2026」に向けたアイデアソンを開催
Solist-AI™の特長や活用事例を学びながら、技術を活かした革新的なアイデアを生み出す場として、「ROHM EDGE HACK CHALLENGE 2026」連動のアイデアソンが開催されました。

Kyoto Micro Maker Faire 2026 出展レポート:Young Makerの熱量を体感、エッジAIへの関心も高まる
ロームは、技術系アイデアコンテスト「ROHM EDGE HACK CHALLENGE 2026」を紹介するために、京都工芸繊維大学 松ヶ崎キャンパスにて開催された「Kyoto Micro Maker Faire 2026」に出展しました。

人気記事



カテゴリー
ROHM ENGINEERING TIPS
回路設計の道しるべ
エンジニアたちの
技術サポートフォーラム
人気技術セミナーを
いつでもオンデマンド視聴
Download Plus
Raspberry PiやArduinoを使った電子工作から、ロボコン出場ロボットを徹底解剖した紹介資料まで!無料ダウンロードできる資料の一覧はこちら!
© Copyright 2025. Device Plus – デバプラ - ROHM.