
| 出場回数 | 3回目(昨年度ベスト4) |
|---|---|
| チーム名(の意味) | Robo+ism 自分たちの気持ちや志(ism)を作製するロボットに詰め込んでいこう、という意味で決めました。 |
| キャプテン名 | 相澤航輝さん |
| 出場者名 | 金井嵩幸さん、岩月駿さん |
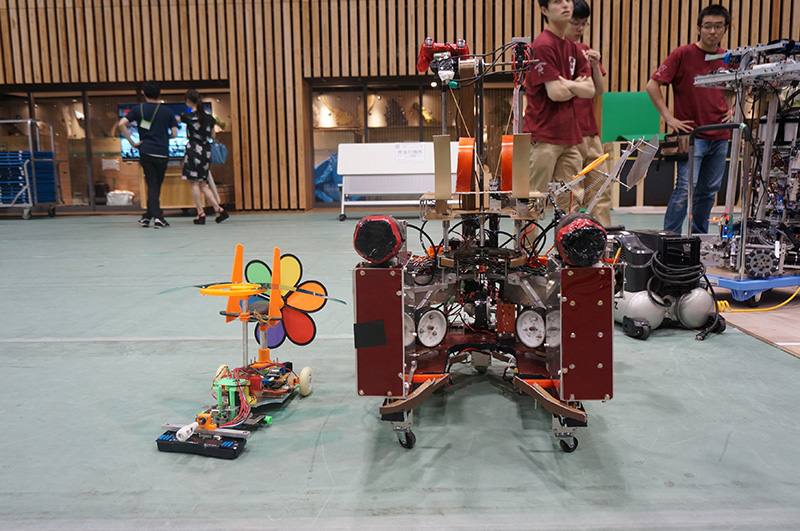
| ロボット名 | ハイブリッドロボット:GR-002“超時空紅蓮機動要塞AMaDeUS” 由来: AMaDeUSは Außenseiter ; Machinery Designed for the Ultimate Strength の意です。 エコロボット:GR-003“FELIX” 由来: FELIXは fighter enchants with the luminous ixia の意です。 |
| ロボットのコンセプト | エコロボットは、ハイブリッドロボットに取り付けられたファンの風を受けて動きます。帆で風を受けていましたが、 風をうまく当てるのが難しく、結果エコロボットの動作が不安定になっていました。そこで新たにプロペラを取り付け、その回転で動くことにより、安定した動作を実現できました。 ラインの読み取りにはカラーセンサを用いています。このカラーセンサは非常に小型で、大量に並べることが出来るため、ラインの読み飛ばしの心配はありません。 ハイブリッドロボットの特徴は、なんと言ってもそのスピードです。最高速度2m/秒というNHK学生ロボコンでトップクラスの速度になりました。また上下左右自由に動くXZテーブルにより、エコロボットにファンの風を確実に当てられます。このテーブルは自動化しており、超音波センサで地面との高さを測ることで、エコロボットのプロペラと同じ高さにファンを移動させています。 ポールを登るためのポールクライム機構も、このロボットの特徴です。ポールを登るためのモータを、トグル機構を用いてシリンダで押し付け登ります。 |
| キーデバイス | マイコン:STBee mini 足回り、ポール上昇用モータ:朱雀モータ テーブル用モータ:タミヤ540モータ、タミヤ380モータ |
| こだわったポイント | エコロボットのステアリングにはサーボモータを使用していますが、このサーボの選定が大変で、いろいろな種類のサーボモータを試しました。大会では、トルクが強く、反応速度が速いフタバサーボを採用しました。また風を受ける機構を帆からプロペラに変更したことで、エコロボの速度が一定になり、安定した走行が可能になりました。 ハイブリッドロボットは高速な走行にこだわりました。ビデオ審査では確実な走行のためにギア比を高めに設定していましたが、撮影後に適正なギア比に変更したところ、最高速度2m/秒というNHK学生ロボコンでトップクラスの速度になりました。さらに、ロボット上部には回転するガイドがついており、 ロボットがポール上昇中に回転した場合にも、プロペラを取り付けるアームをエンジンに誘導します。 |
| 戦略・必勝パターンは? | ハイブリッドを自動で動かす場合、エコロボットとの併走する際に速度が低下してしまうため、ハイブリッドロボットの移動の自動化は部分的にしか行っておりません。それに対し、テーブルは自動で動くため、操縦者は足回りの操縦に専念でき、併走時も速度を落とさず走行できます。 エコロボットはライントレースと軌道予測による補正を併用し,リバーまでは最適な軌道をたどることが出来ています。ダウンヒルでは急激にステアリング機構を曲げることで、ハイブリッドロボットがポールにたどり着くまでの時間を稼いでいます。プロペラは受け取りやすい位置に固定し、ハイブリッドロボットの受け渡し時間を短縮しています。 |
| ベストスコア・最速タイム | 1分 |
| 他のチームのテストランを見ての感想 | 自動ハイブリッドが速い |
| チームのHP等 | http://ynu-robocon.sakura.ne.jp/ |






