 NHK学生ロボコン2021出場校のロボット開発の経緯、コンセプト、自慢できるポイント、戦略などをまとめた「出場ロボット解剖計画」を4回に渡りお届けします。
NHK学生ロボコン2021出場校のロボット開発の経緯、コンセプト、自慢できるポイント、戦略などをまとめた「出場ロボット解剖計画」を4回に渡りお届けします。
第3回は、立命館大学 RRSTと金沢工業大学 翔華です。
お読みいただいた方にとって、これからのロボコンが楽しくなり、技術的なヒントが掴める一助となれば、これ以上うれしいことはありません。
お忙しい中ご対応頂いた各チームの皆様、ご協力頂き、誠にありがとうございました!
目次
立命館大学 RRST

ロボットのコンセプト、設計思想を教えてください
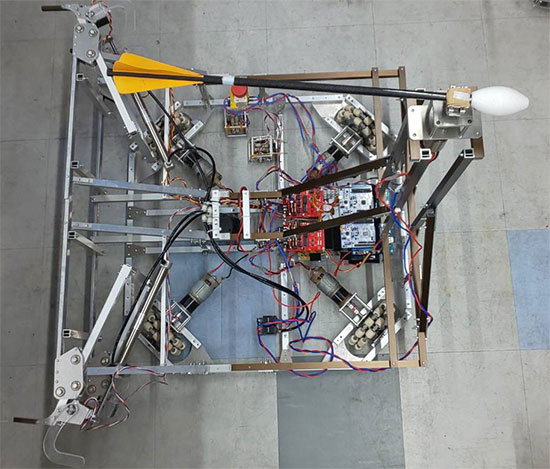
勝つことを目標とし、できるだけシンプルで加工が容易な設計としました。
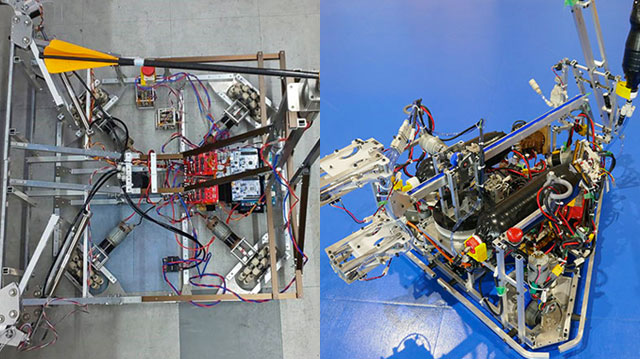
スローイングロボット
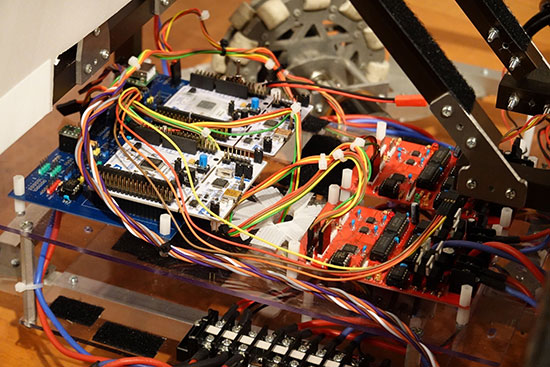
スローイングロボット 回路
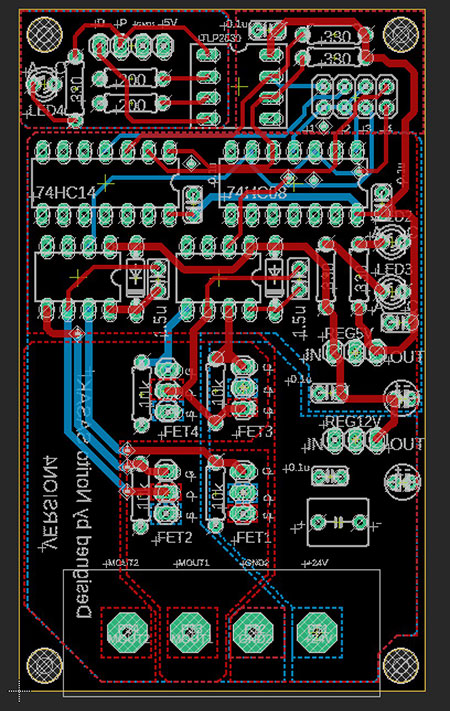
回路設計図
ディフェンスロボット
こだわったポイント、⾃慢のポイントを教えてください
本番では機会がなく、隠されたままとなっている隠し技「フェイント」をTRに搭載しました。射出機構において方向は目的の壺とは異なるとなっているが、タイミングを操作することで目的の壺へ射出し、相手の妨害機構をだまします。
戦略について教えてください
相手の状況に合わせて競技を進めていくため、ここでは方針を述べることとします。
矢を投擲するTRの射出方向のみを変えることで特定の位置3か所からのみ、すべてのポットへ投擲をします。これにより、移動距離を最小限にして素早く得点を重ねます。ツイン達成を優先事項として試合を進めていきます。
また、DRは回転可能なⅡ型、Ⅲ型のポットに対して、壺を自由に回転させることによりTRの投擲成功へのサポート及び相手の妨害を行います。
上記のようにして、勝利を目指して挑みます。
特に重要なデバイス、パーツを教えてください
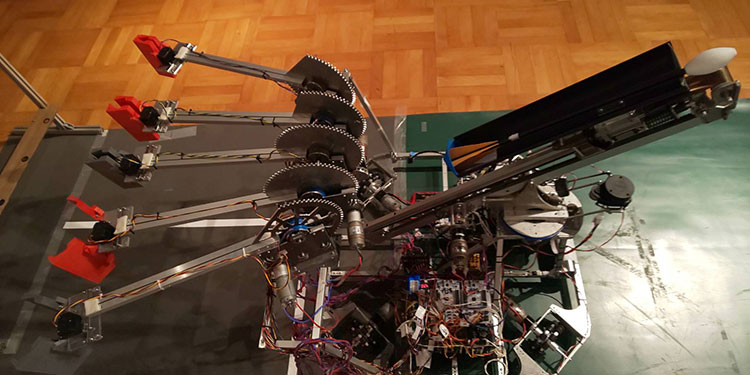
低い弾道で放たれる射出機構です。
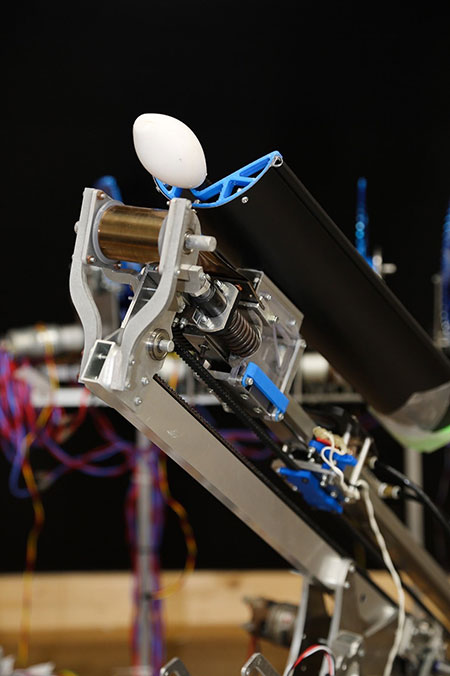
スローイングロボット 射出機構
金沢工業大学 翔華
ロボットのコンセプト、設計思想を教えてください
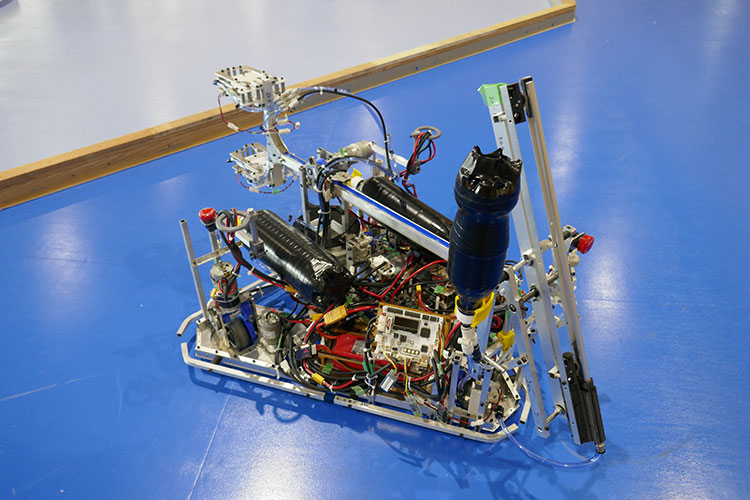
ディフェンスロボット(Defensive Robot(DR))
InnerAreaへ迂回して移動するため素早い足回りを目指しました。テーブルを掴むエンドエフェクタを前後左右に動かせるようにすることで掴みやすくしました。
ディフェンスロボット アクチュエータ1つで開閉と機構ロックを行う把持機構
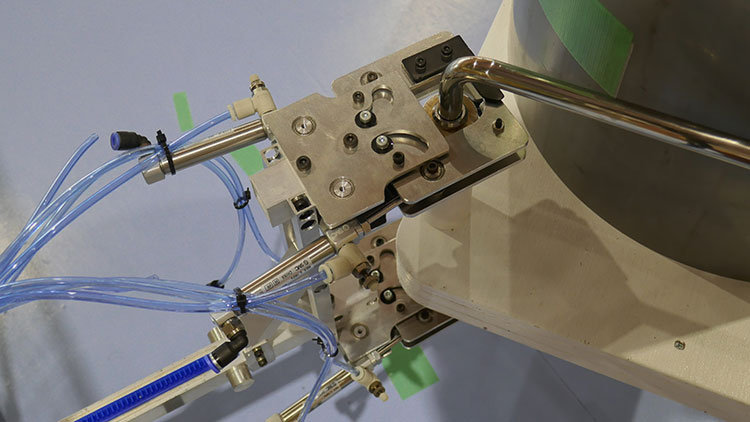
ディフェンスロボット アクチュエータ1つで開閉と機構ロックを行う把持機構
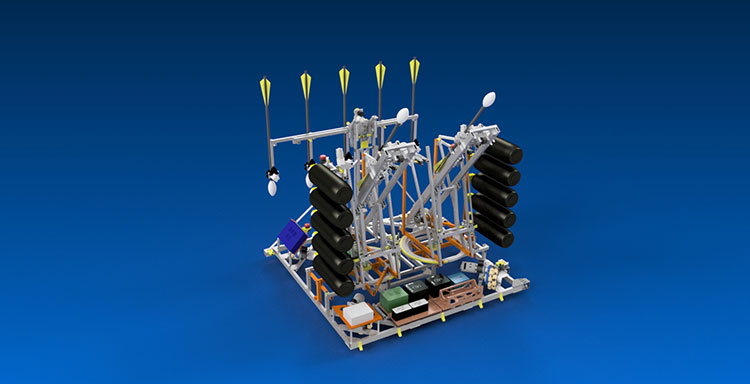
スローイングロボット(Throwing Robot(TR))
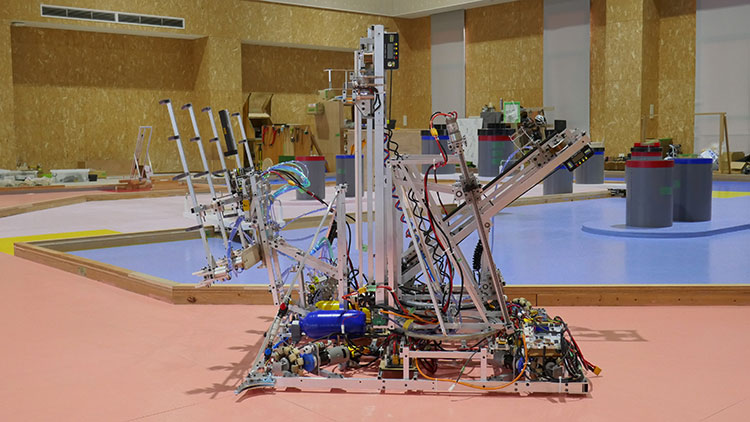
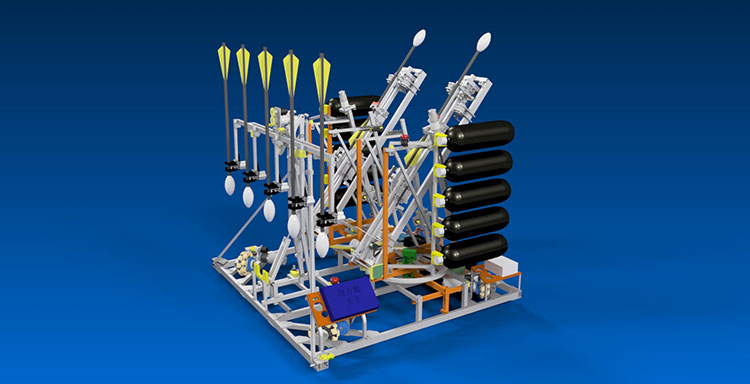
自由度が高い2つの高精度な射出機構を用いて、アローラック正面からすべての矢を打ち切ることをコンセプトとしました。コロナ禍に対応して加工負担が減らされた設計です。
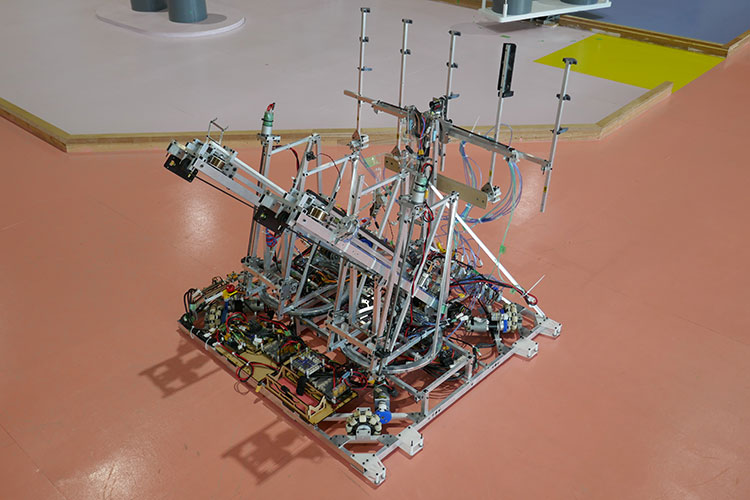
スローイングロボット
スローイングロボット
こだわったポイント、⾃慢のポイントを教えてください
ディフェンスロボット(Defensive Robot(DR))
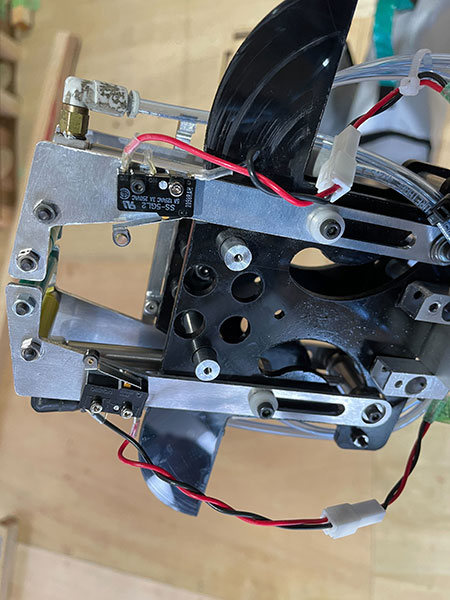
エンドエフェクタにはエアシリンダ1つで開閉とロックまでできる機構を採用し、小型化を実現させました。
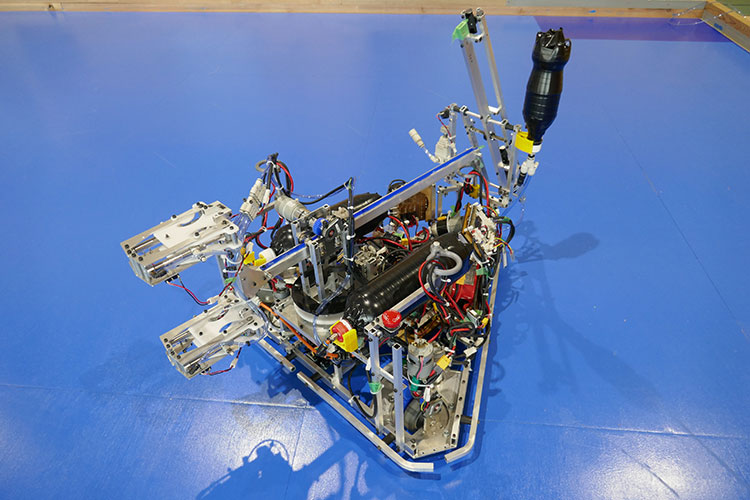
ディフェンスロボット
ディフェンスロボット
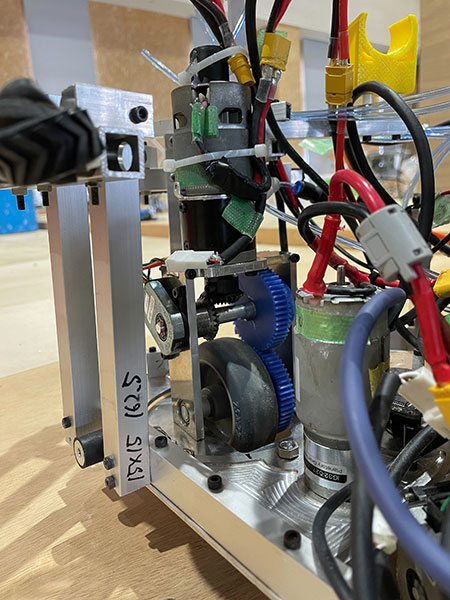
ディフェンスロボット ステアユニット
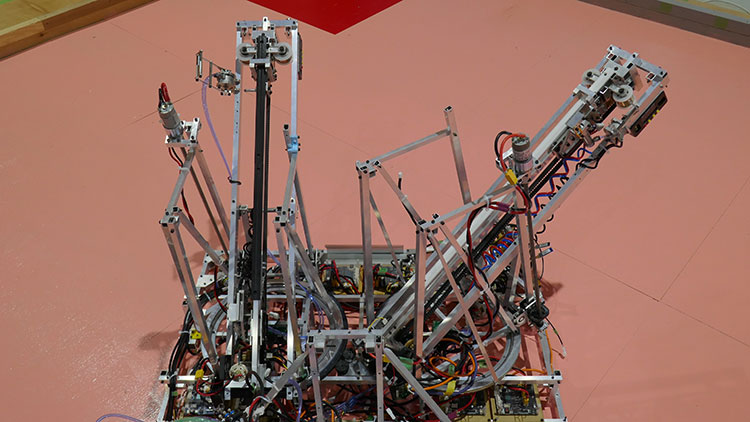
スローイングロボット(Throwing Robot(TR))
エアシリンダで駆動させるリンク機構です。昇降と180度回転をそれぞれ1本のエアシリンダで行います。
スローイングロボット
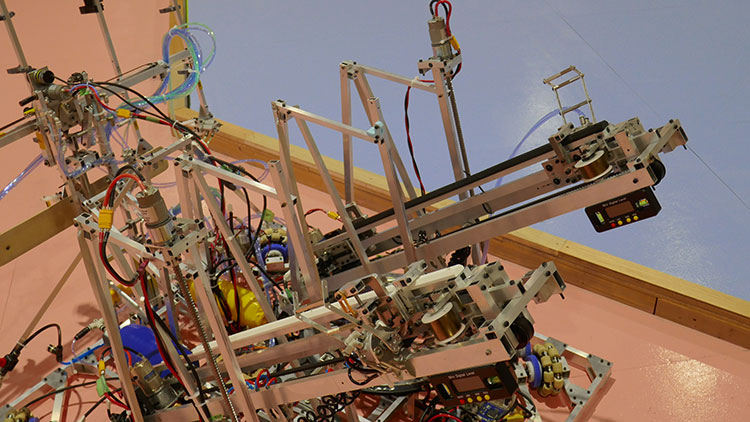
スローイングロボット
スローイングロボット
スローイングロボット
戦略について教えてください
足回りのスピードで3型ポッドを掌握し、得点勝負に持ち込みます。
特に重要なデバイス、パーツを教えてください
独立ステアリング、RZ-8BAWA、モータードライバ、磁気エンコーダです。






