NHK学生ロボコン2021出場校のロボット開発の経緯、コンセプト、自慢できるポイント、戦略などをまとめた「出場ロボット解剖計画」を4回に渡りお届けします。
第4回は、京都工芸繊維大学 工学院大学 KRPです。
お読みいただいた方にとって、これからのロボコンが楽しくなり、技術的なヒントが掴める一助となれば、これ以上うれしいことはありません。
お忙しい中ご対応頂いた各チームの皆様、ご協力頂き、誠にありがとうございました!
目次
京都工芸繊維大学 ForteFibre

ロボットのコンセプト、設計思想を教えてください
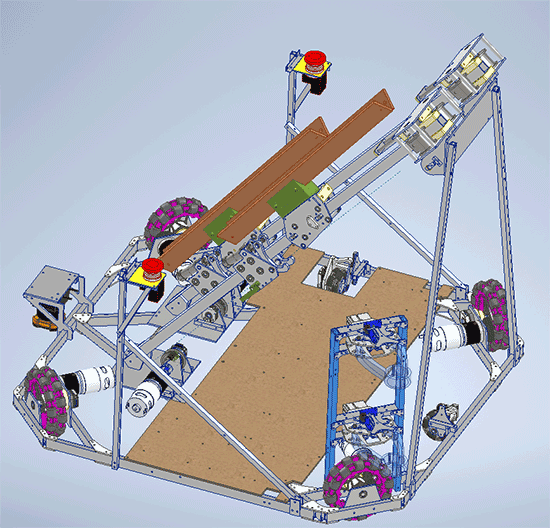
LRFを用いたpot検出と定荷重バネによる高精度な射出を元にして全自動で試合運びをします。
4本の定荷重ばねを用いて攻撃重視の機体とし、人のリソース不足をカバーするために大部分の機構を2機体共通にすることで、設計に割くリソースを減らしています。
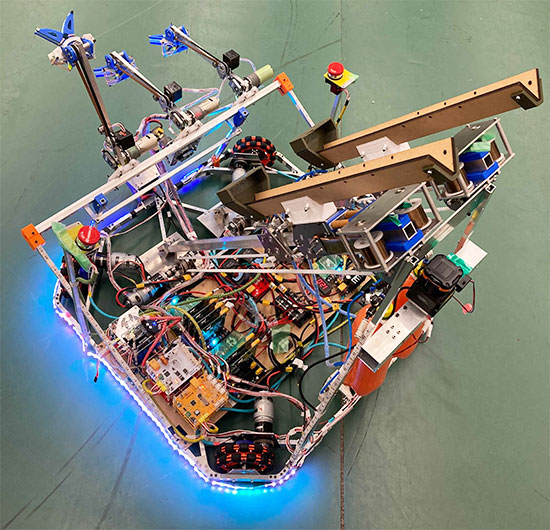
スローイングロボット

ディフェンスロボット
こだわったポイント、⾃慢のポイントを教えてください
操縦者のサポートとカッコよさを両立するLEDテープ、例年から一新しすべてを新規開発した自作基板、定荷重ばねのベアリングガイドです。
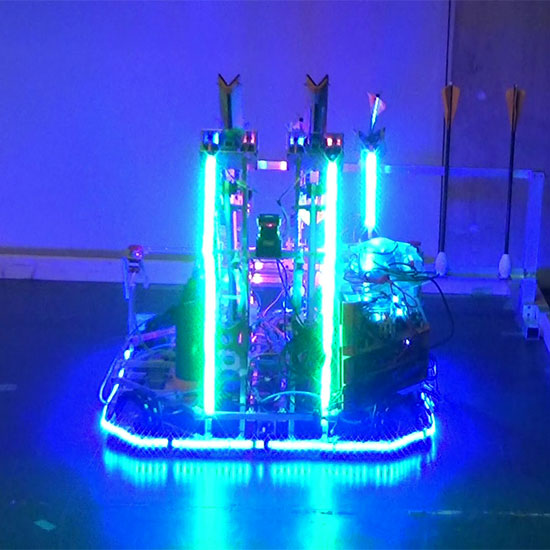
LEDを点灯させたディフェンスロボット

基板
戦略について教えてください
スローイングロボット(Throwing Robot(TR))
TRはアウターエリアを縦横無尽に駆け回って最も入りやすいところに移動し、2本の射出機構からポットに矢を入れる
スローイングロボット
ディフェンスロボット(Defensive Robot(DR))
試合開始後に相手側2型ポット、3型ポットに矢を入れたのちインナーエリアに入りテーブルを回転させることで相手に矢を入れさせないようにし防御を行います。
ディフェンスロボット
特に重要なデバイス、パーツを教えてください
UTM-30LX(LRF)v
センサの周囲270度の物体までの距離を計測するためのセンサです。
フィールドの枠から自己位置推定を行ったり、ポットの位置を特定するために使用します。
JetsonNano
機体上で処理を行うためのGPU付きのコンピュータです。
LRFやその他のセンサの値を処理したり。コントローラからの操作を受信したりするために使用します。
工学院大学 KRP

ロボットのコンセプト、設計思想を教えてください
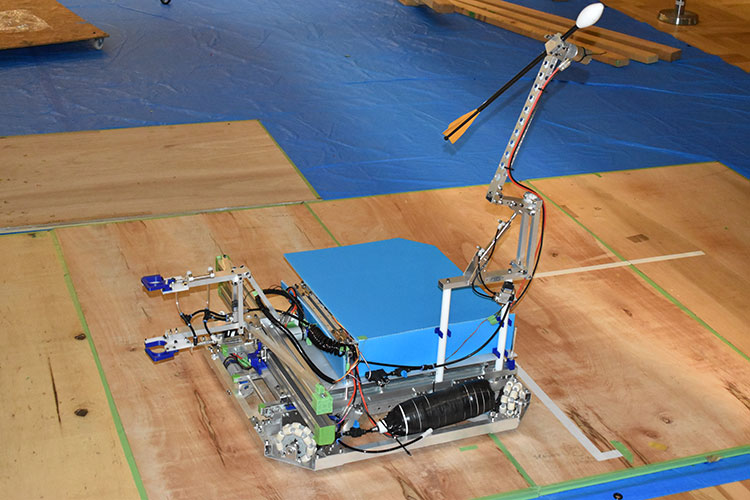
本番確実に動く壊れない機体を製作することです。

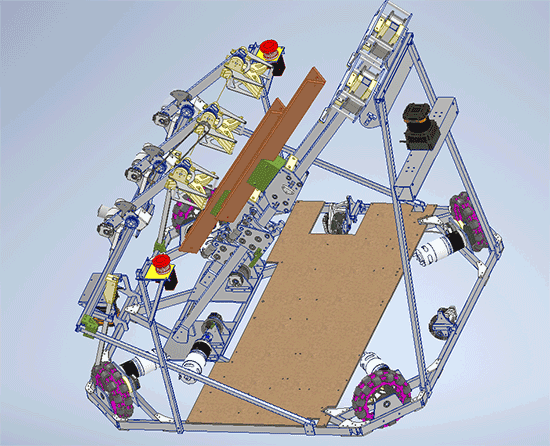
スローイングロボット
こだわったポイント、⾃慢のポイントを教えてください
剛性、精度に優れた安定した足回りは、大会まで1度もメンテナンスすることなく使用できました。
強度に優れ横ブレがほとんどなく、ブラシレスダイレクトドライブのパワー感にあふれた発射機構は全ポットを55度という高射弾道で狙います。
旋回機構を回すための配線は、真ん中部分を全部通し、旋回したときに配線が引っ張られないようにする調整が大変でした。
健気なテーブル回転機構と、矢を振り回す1型ポット妨害機構で、特別賞をいただくことができました。
ディフェンスロボット
戦略について教えてください
3型ポットと自陣の1型ポットを妨害しつつ得点を重ねます。
相手のVゴールを防ぐことに重点を置き、TRはラック前からすべてのポットを狙えるため点数を重ねつつ得点勝利を目指し、チャンスがあればグレートビクトリーを狙います。
特に重要なデバイス、パーツを教えてください
PC
ロボットの操作に必要不可欠。
ブラシレスモータと自作ブラシレスモータードライバー
すべてのポットを狙うために使用された革命的戦力です。
ショックアブソーバ
定格の2倍くらいで酷使された頑丈なパーツです。