前編:小型マイクロドローンをチューニングしてオリジナルの機体をつくろう!

みなさん、こんにちは。もっちゃんです。室内でも飛ばせる小型のマイクロドローンをチューニングして、オリジナルの飛行特性を持った機体にする連載の後編になります。前編では、バッテリやプロペラ、モータといったハード面を変更して、よりパワーのある機体に仕上げていく過程を紹介しましたが、今回はソフトをチューニングして、さらに飛ばしがいのあるドローンに仕上げていきたいと思います。
■目次
・はじめに
・Rateprofileの「RC Rate」の設定について
・Rateprofileの「RC Expo」の設定について
・キャリブレーションを調整して素直な機体に仕上げる
・プロポキャリブレーションについて
・ジャイロキャリブレーションについて
・機体をマイルドな特性に仕上げていく
・上下方向の飛ばしにくさを解消する
・まとめ
■はじめに
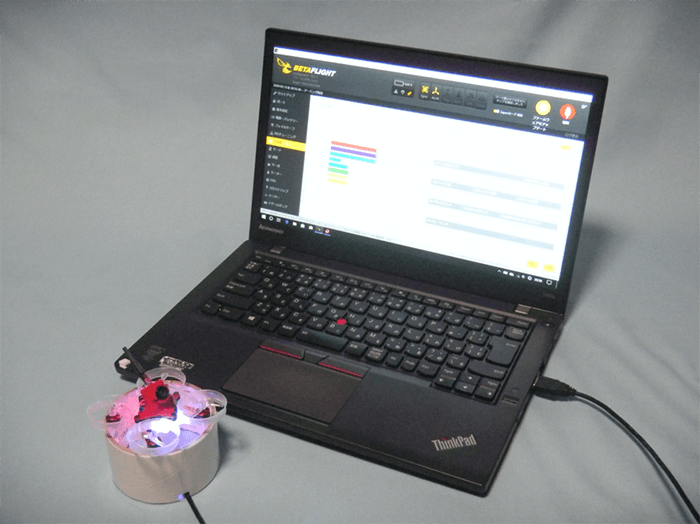
前編では、バッテリ、プロペラ、モータとハード面でのチューニングを紹介してきました。今回は、ドローンに搭載されているフライトコントローラをソフトウェア「Betaflight」を使って設定変更することで機体の特性を変える方法を紹介していきたいと思います。なお、「Betaflight」は無料で使用することができます。下記のURLからPCにインストールしておきましょう。
※Betaflight
https://betaflight.com/
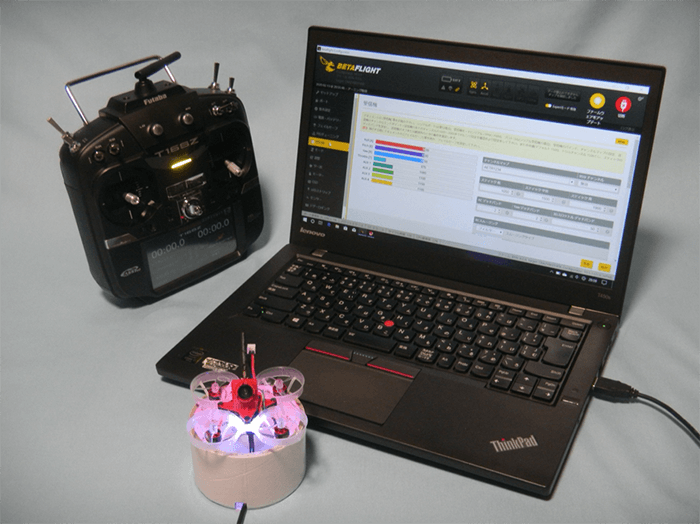
今回は「Betaflight」内のPIDチューニングで可能な設定を紹介していきます。ソフトウエアによるチューニングですので変更できるのは特性だけです。ですが、この調整でできることは多岐に渡り、自分のイメージに近い機体特性に仕上げることで扱いやすくなります。
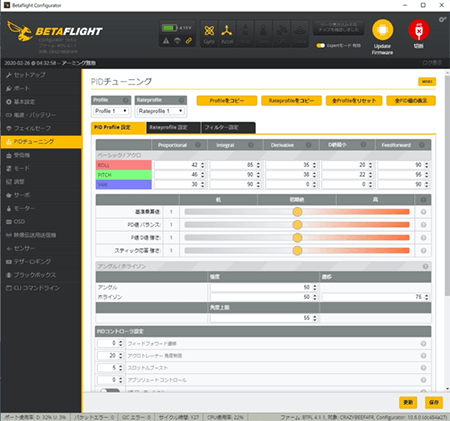
タブの名前がPIDチューニングとなっています。PIDとはProportional-Integral-Differential Controllerの略で、制御工学におけるフィードバック制御の種類のひとつです。
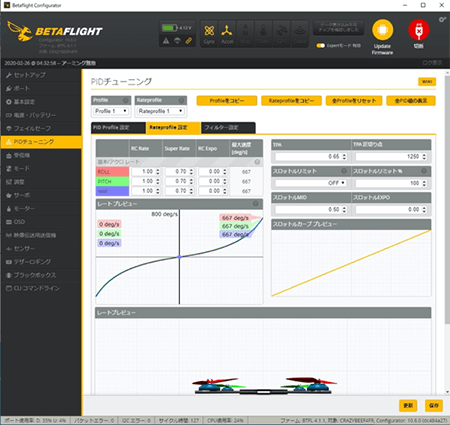
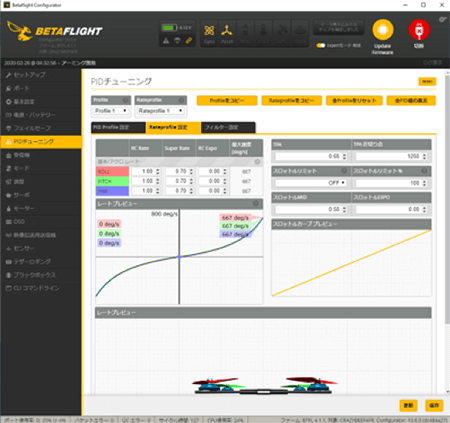
と難しい話は横に置いておいて、このタブではPID以外にも調整できることは多くあります。代表的な調整項目として「Rateprofile設定」です。この設定は操作をする上での特性を調整する項目となります。項目はそれぞれ「RC Rate」「Super Rate」「RC Expo」の3つがあり、それぞれの値がロール、ピッチ、ヨー軸で調整可能です。まずはこの3レートについてどのような項目で、どう調整すればよいのかをしっかり理解しましょう。
先にこの「Rateprofile」の効果が出る範囲について解説させてください。Rateprofileはアングルモードやホライゾンモードではヨー以外変化が現れません、この設定はアクロバティック飛行のできる「AIRモード」および「ACROモード」に限られます。このAIRモードとACROモードを同じと考えている方が多いようですので補足しておきます。
・AIRモード:このモードはモードスイッチでAIRモードを割り当てた時に発動します。
・ACROモード:ACROモードはモード切り替えスイッチで何も指定していない場合に発動します。
このようにAIRモードとACROモードは切り替えることができます、違いはAIRモードの時はAIRモード補正が入ること。代表的な例としては「FPVアングルミックス」があります。これに対しACROモードは一切補正が入らない3軸ジャイロリニアモードとなります。すべての舵を自分で打つ必要があり、ドローンを完全に自分の支配下で飛ばすモードと考えてください。この選択はご自分の操縦スキルに合わせて選択してください。
■Rateprofileの「RC Rate」の設定について
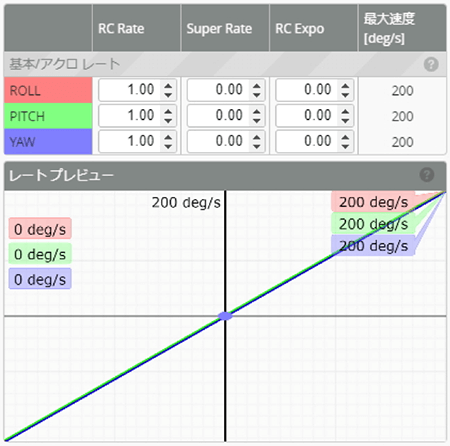
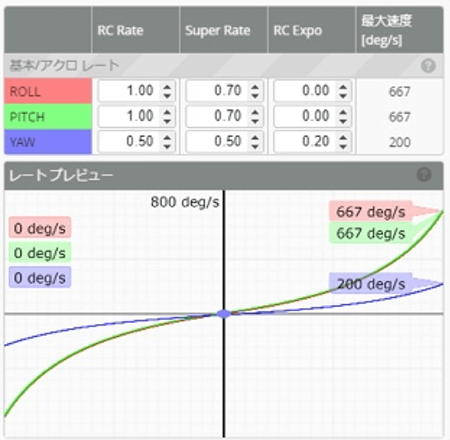
「RC Rate」は、基本動作量を設定する項目です。理解しやすくするために、他のレートを無効化しましょう。やり方は「Super Rate」「RC Expo」ともに数字を0.00にします。下のレートプレビューのグラフが真っすぐな直線になりましたでしょうか?その上で「RC Rate」の値を1.00にしてください。右側の「最大速度[deg/s]」が200になったと思います。この数字の意味は、機体が回転する速度を表しており、ROLL軸で説明するとプロポのエルロンステックを一杯に倒した場合、一秒間で200°横回転するという意味になり、特性カーブが直線ですのでスティックを半分倒した場合は一秒間に100°機体は横に回転することを表しています。ですので、この数字を大きくすれば機体の動きは機敏になります。しかし、この数字を大きくし過ぎると中央付近が敏感になり過ぎて、ホバリングすることさえままならなくなってしまいます。この値はこれ以上上げると扱いにくくなる…と感じる手前まで上げて置くのがポイントです。この数値はドローンの基本動作を決める数値ですのでしっかり調整していきましょう。
■Rateprofileの「RC Expo」の設定について
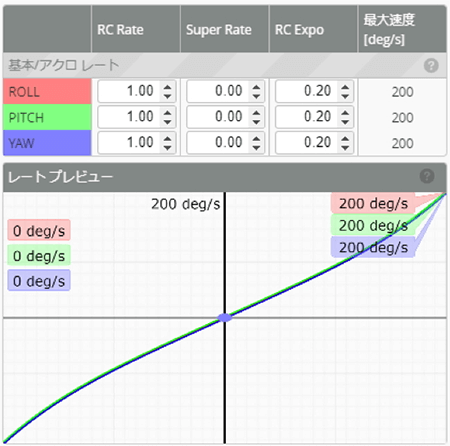
基本動作が決まったら、今度はドローンを少し扱いやすくしましょう。敏感過ぎるスティックの中央付近のレスポンスを穏やかにするのが「RC Expo」となり、スティック動作量で中央から50%の範囲を調整することができます。
ホバリングさせてみて、ちょっと扱いにくいと感じたスティック中央辺りの感度が、この数値を変更することで鈍くなります。舵が敏感過ぎてちょっと扱いにくいと感じたスティック中央付近の動きが、自分で敏感すぎず扱いやすくなるくらいの数値を入れていきます。
この数字が0.00のままでも普通に扱えるような場合は、ひとつ前の「RC Rate」の値が低すぎます。「RC Expo」の値は0.10~0.20くらいで設定をすると良いでしょう。逆に「RC Rate」値も「RC Expo」の値が0.10〜0.20くらいで丁度良くなるのが適正値となります。
■Rateprofileの「Super Rate」の設定について
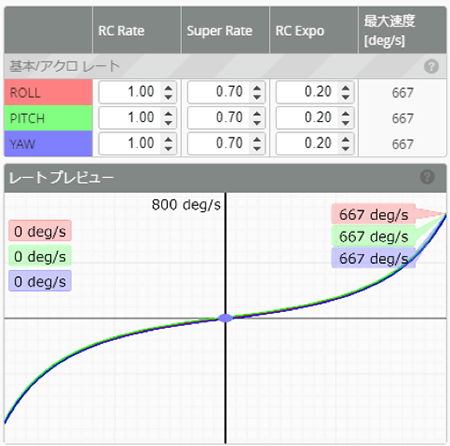
最後は「Super Rate」の設定です。これはスティックの50%∼100%の範囲のレスポンスを変化させる項目です。特にスティックを端まで一杯に倒した時の最大速度に関連してきます。
試しにこの数値を0.90にしてみましょう。最大速度が1,998deg/sになりました。これは一秒間で1,998°回転するという意味で、一秒間に機体は5.5回転します。実際には余程の極端なモータとプロペラを使ってもここまでの速度で回転することはないです。現実的には「Super Rate」は0.80くらいが機体として耐えられる限界で、これでも最大速度は1,000deg/sとなり、機体は一秒間に2.8回転する計算です。FPVでは完全に認識できないほどの速度で回転しますので、任意の角度で止めることはほぼ不可能です。通常は0.70∼0.75くらいの値を入力しておきましょう。
このように、タブの名前がPIDチューニングとなっているので「PID」の調整項目と思われがちですが、この3項目の値の入力は非常に大切です。何度かテストフライトを重ねて自分のベストな値を見つけていきましょう。
■キャリブレーションを調整して素直な機体に仕上げる
レーシングドローンに入門してくる人は、それ以前にトイドローンを飛ばした経験がある、ということも多いでしょう。小型のトイドローンは、スティックの操作に対し極端に鈍感な特性の機体が多いですが、そのままのフィーリングでレーシングドローンを飛ばすと、運動性が良いため機体が暴れてしまい、まともにホバリングすらできないことが多いはずです。
これは雑な操作を受け付けなかったトイドローンの操縦感覚で、レーシングドローンを操縦した際に発生するよくある事象です。とはいえ、繊細なプロポスティックを覚えるまでにはかなりの時間を要します。それができるようになるまで、機体を落としたり、ぶつけたりしてしまい、機体を壊してドローンを断念するといったことがあるようです。
機体に慣れるまでは、トイドローンのように運動性を下げてしまっては練習になりませんが、ある程度運動性を下げることで機体の暴れを少なくし、飛ばしやすい設定にチューニングすることは可能です。このパートでは、素直で飛ばしやすい機にチューニングする方法を紹介していきたいと思います。
この内容は、初心者に限らず、ある程度飛ばせる方も参考になると思います。特にキャリブレーションをしっかり調整すると機体特性が素直になり、非常に飛ばしやすくなります。ある程度飛ばすことのできる方でも、これができていない機体を無理やり飛ばしているのを見かけます。逆にエキスパートの人ほど重要性を理解し、キャリブレーションをしっかりおこなっています。
■プロポキャリブレーションについて
さて、キャリブレーションには大きく2つの種類があります。機体のジャイロセンサに正しい水平姿勢を教えてあげることと、送信機から送られてくる信号を正しく設定することです。
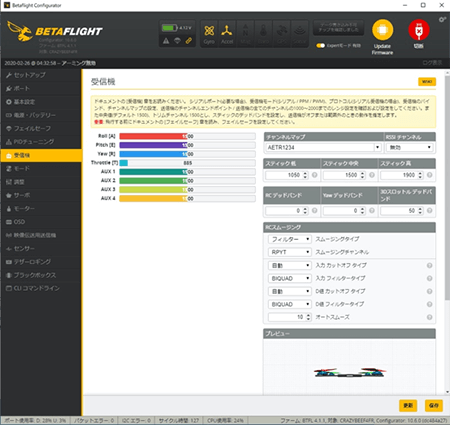
まず、送信機のニュートラルキャリブレーションをおこないましょう。「Betaflight」設定の「受信機タブ」を開いてください。この調整で重要なのは「Roll」「Pitch」「Yaw」の中央値です。この中央値を1,500msにすることが重要で、この数値がズレている場合は同タブ内の「プレビュー」に表示されているドローンのモデルがゆっくりと回転しているはずです。これがピタリと止まるように調整する必要があります。
特に多くの日本人フライヤーが使用している双葉電子工業(Futaba)製のプロポを使っている場合は、そもそもセンターの値が1,520msになっています。これを微調整するには、プロポのサブトリム項目を変更します。
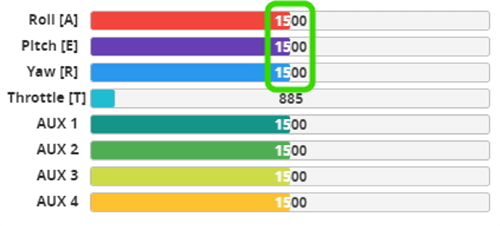
プロポの設定画面を開き、受信機タブ内のスライダーに表示されている数字ができる限り1,500になるように調整します。操作のたびに少し数字が変わると思います。できるだけ1,500近い数字が出るようにしましょう。
次に1,500に対しチラつきや振れが出ると思いますが、その範囲は無効にする設定をします。設定するのは「RCデッドバンド」という項目で、チラつき等のジッターを吸収してその範囲の動作を無効にする機能です。この数字は10以下にしてください。それ以上の振れやチラつきがある場合は送信機の性能です。センシングしているポテンショメータや、スティックの取り付けてあるジンバルの精度の問題で、長く使ったプロポや安いモデルでは大きくなる傾向にあります。前述したFutabaのプロポであれば、個々の数値は4程度になっているはずです。この設定を完全に終えると、「プレビュー」のドローンの表示が止まったと思います。
なお、サブトリムを変更した場合はエンドポイントにも気を付けてください。スティックを一杯に動かしスライダー上の数字が1,000以下から2,000以上を表示していることを再度確認してください。これは、サブトリムを動かした場合に最大値、最小値とも変わっていることがあるためです。
■ジャイロキャリブレーションについて
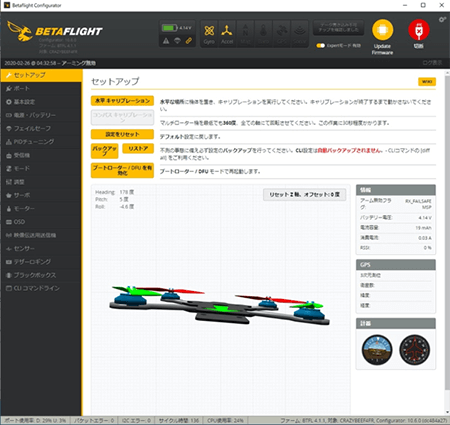
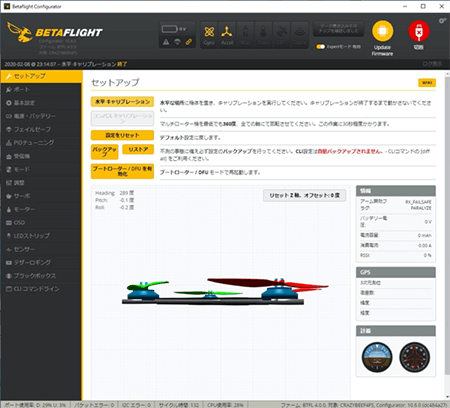
プロポのキャリブレーションが終了したら、今度はジャイロキャリブレーションおこないます。「セットアップ」タブの「水平キャリブレーション」の項目です。この設定をおこなう際は、機体を水平な場所において姿勢を維持させることが重要で、傾いた姿勢でキャリブレーションをおこなうと、実際のフライト時に傾いた姿勢で機体は止まろうとしてしまいます。
プロポのキャリブレーションが完全にできていて、なおかつ機体の水平キャリブレーションが完全におこなわれていれば、機体は安定してホバリングします。ほとんど操作することなく機体がホバリングしていればキャリブレーションは完璧に設定されている証拠です。
もし機体が流されるようでも、プロポのトリム機能で調整するのは止めてください。これで調整することは百害あって一利なしです。事実、挙動が変なドローンを飛ばしている方の送信機画面を見ると、トリムがセンターになく、トリムで調整してしまっているのを何度も見てきました。トリムで応急処置的に調整するのではなく、キャリブレーションをしっかりおこなうことで、スティックに触れていなくても機体が流れないような状況を作るようにしましょう。
■機体をマイルドな特性に仕上げていく
基本調整が済んだら、機体の特性を入門者向け設定に変えていきます。機体の飛行特性を調整する項目は「PIDチューニング」内の項目です。ただし、この調整は操作を穏やかにする場合、設定するパラメータ項目は多くはありません。そもそも早く飛ばすのが目的なので、穏やかに調整するのは苦手なのです。そんな点が、初心者にはレーシングドローンの操縦が難しいと感じる要因かもしれません。
それでは調整に入っていきます。初心者の方は、まず6軸ジャイロモードに相当する「アングルモード」を使って練習するのが一番ですので、ここではアングルモードでの調整項目をメインに進めていくことにします。
前にも述べましたがPIDチューニングと言いながらPID以外の項目も多くあります。まずは前回の機体の動きをクイックにする際に使用した「RC Rate」「Super Rate」「RC Expo」の3項目を調整していきます。これも前回の機体クイック化で述べましたが、この設定はヨー以外効果が表れません。ですが、初心者にとってヨー方向はクイックに動き過ぎるととても扱いにくくなります。特にFPV飛行の時は進みたい方向へ機体を向けることができず、ゲートに向かって進む時などフラフラしてしまいますので操縦スキルに合わせて徐々に動きを速くしていくことをオススメします。
まずは初心者で緻密なラダースティック操作ができない時など、ラフなスティック操作でも方向を定めやすいように調整します。PIDチューニングタブ内で「Rateprofile」を開きます。ここの「YAW」設定項目で「Super Rate」の値をいったん0.00にしてください。「RC Expo」の値はとりあえず0.10で良いと思います。この状態で「RC Rate」の値のみを変更して飛ばしてみましょう。最初は0.50くらいから始めます。キャリブレーションが完全に済んでいればホバリングはさほど難しくないはずです。上下にフラつくのはとりあえず頑張ってください。これは後で調整していきます。

ホバリング状態でラダースティック(左のスティック)を左右どちらかに一杯まで切ってみてください。今までと違い、機体はかなりゆっくりした回転になると思います。ラフなスティック操作でもゆっくり廻るので、自分の思った方向で止めることも容易に可能です。自分の技量に合わせて扱いきれる速度で廻るように「RC Rate」の値を少しずつ増やしていきましょう。
調整は、何度も飛ばしては調整、を繰り返し、ほどよい値を探ってください。当然、この時はスティックいっぱいに倒すのではなく、半分ぐらいの操作でほどよく廻る感じに調整するのがコツです。スティックをスイッチの様に左右に切り返すのは止めてください。
「RC Rate」の調整が済んだら「Super Rate」を設定します。この「Super Rate」は比例制御の操作量ブースタのようなもので、スティックを半分以上倒した時に効果を示します。これも0.50くらいから始めるのが良いと思います。
ヨー方向の調整が済んだら、今度はロール・ピッチ方向の感度を調整します。通常ここでPID値を変更して特性を変えていくのがスタンダードなやり方ですが、初心者の方がこの値を多少変更したところで変化が分かりづらく、変える前後の差を感じにくいはずです。特殊なチューニングが施されたモデルではない限り、多くのモデルはデフォルトのPID値がそのまま採用されていることが多いですので、PID値のバランスは実績のある数字が入力されていると考えたほうがいいでしょう。この数値をそのまま利用し、効果量を減らすことで特性を穏やかにしていきます。
変更するパラメータは「アングル・ホライゾン」の項目内にある「強度パラメータ」です。標準では50が入力されていると思いますが、この数字を下げることでスティック操作に対する反応が穏やかになります。さらに、数字を30くらいまで下げると運動性はかなり下がります。ラフなスティック操作でも機体は追従しませんので、動きがマイルドに感じられるでしょう。
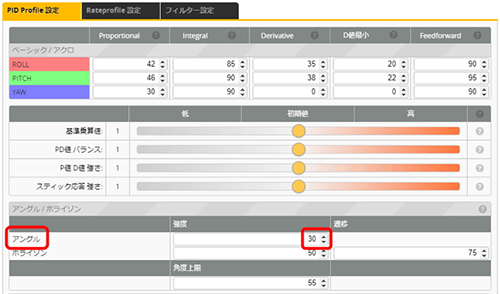
注意しなければいけないのは、スティックを操作した時の反応も遅くなることです。言い換えると、スティックを中央に戻した時に機体が水平へ戻るのも同じように遅くなるということです。このあたりがトイドローンと違う部分ですので、アングル強度は30以下に下げないようにしてください。ドローンが大きく傾くのに時間が掛かりますが、戻る時も同じことが言えますので、大きく傾かないよう、角度上限の数字を下げて置くのも良いかも知れません。
■上下方向の飛ばしにくさを解消する
ここまで終わるとドローンの動きは随分穏やかになってきたと思いますが、機体は上下に動き、床と天井を行ったり来たりしているのではないでしょうか?特に高度維持機能が付いたトイドローンを飛ばしていた方はその動きが顕著なはずです。これに関しては「たくさん練習してください」と言うしかないのですが、少しだけ調整項目がありますので紹介します。
スロットルの操作は慣れよりはプロポの取り扱いが大切です。と言うのも、モード1プロポの場合のエルロン操作、モード2プロポの場合のラダー操作をした際に、スロットルが変化している事が挙げられます。
本人はスティックを真横に操作しているつもりでも、実際の動きはエルロンやラダースティックを内側に倒した場合、スロットルが下がる、逆に外側に倒した時はスロットルが上がると言ったような斜めに操作しているのです。
これは手の小さい方に顕著に現れますが、親指の可動範囲と間接位置の問題です。手元にプロポがある方は試しに持ってみてください。その状態でスティックを真横方向にいっぱいまで切り替してみてください。余程意識しないと真横にスティックを倒すことはできないと思います。本人はまったく無意識でスロットルを上下に動かしているのです。この影響を少なくするために、ホバリング状態のスロットル操作感度を鈍くしましょう。
それではドローンをホバリングさせてみましょう。今までの調整が完璧にできていれば、ホバリングはさほど難しくないはずです。ホバリングができてきたら、その時のスロットルスティック位置を見覚えておいてください。今回はスティック位置が中央より少し上でした。この位置のスロットル操作をゆるやかにしましょう。
PIDチューニングタブ「Rateprofile」設定にある「スロットルMID」の数字を変えていきます。デフォルトは0.50で中央ですので0.60にしました、その隣の「スロットルEXPO」はデフォルトが0.00でリニア特性ですが、ここを今回少し多めで0.50にしてみました。
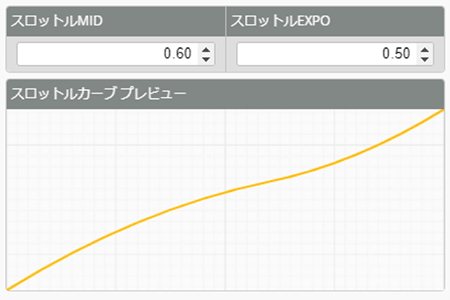
これでスロットル操作の60%程度のところが水平方向に傾いた曲線になりました。早速もう一度飛ばしてみましょう。これらの設定が綺麗にハマれば、比較的穏やかな特性のドローンに仕上がったはずです。これでも上下に振れて操作が難しいと感じる時は「PIDチューニング」で調整します。とは言え、スロットル関係のPID値はありませんのでヨー制御で必要のない「D値」を変えることで変化させます。これは、本来ヨー運動を押さえ込むためのパラメータなのですが、その効果でスロットルにフィルタが働いたようなな効果があります。ですが、ここの数字は大きくても20以下にしておいてください。できれば10程度までに落とすのが良いと思います。大きくすることでレスポンスの大幅な悪化と、パワーを入れた時にドローンが大きく揺れると言った現象が発生してしまうからです。
■まとめ
前編、後編の2回に分けてお届けしたマイクロドローン「TinyWhoop」のチューニングですがいかがでしたでしょうか?ご自身の操縦スキルに合わせて、ハイスピード、ハイパワーのマシンに仕上げたり、マイルドな特性を持つ機体にすることができましたか?
ドローンのセッティングに正解はありません。自分のフライトスタイルに合わせてセッティングしていく過程をぜひ楽しみながら、ご自身で仕上げたドローンを使ってFPVフライトを楽しんでみてください!
今回の連載の流れ
前編:小型マイクロドローンをチューニングしてオリジナルの機体をつくろう!
後編:小型マイクロドローンをチューニングしてオリジナルの機体をつくろう!(今回)