第1回:Lチカonラズパイで、オームの法則・GPIO・トランジスタをちょっと詳しく知る
第2回:Lチカ+モータonラズパイ。より大きな電流の扱い方を知る
第3回:ラズパイを使ったセンサ入力の実験
ラズパイの簡単工作を通して、電子工作の原理や基本を学ぶこの連載。教えてくれるのは、メディアアートの分野で、また「ちょっと深い仕組み」を解説する書籍の世界で活躍している、伊藤尚未さんです。前回はラズパイを使ったセンサ入力の実験について学んでいきましたが、今回はこれまで学んできた仕組みを応用して、作品化する過程とつくるテクニックを紹介していきたいと思います。
◆
[目次]
1. はじめに
2. フォトリフレクタを使った工作
3. 基盤設計について
4. まとめ
1. はじめに
四度目まして、伊藤尚未です(この挨拶も、もうそろそろいいかな?)。最近はさまざまなところで電子工作ワークショップ、作品展示などさせてもらい、いろいろ勉強させていただきました。この連載も早くも第4回目。今回は、第3回で紹介したセンサを使って、簡単な工作をしていきたいと思います。では、早速進めて参りましょう!
2. フォトリフレクタを使った工作
フォトリフレクタRPR-220は赤外線LEDとフォトトランジスタの組み合わせで、光を物体に反射させることでその有無を検知します。データシートをみると用途には複写機やOA機器などと書かれているので、紙やギア、カムなど機械的な物体の移動や位置検出に使われているのでしょう。
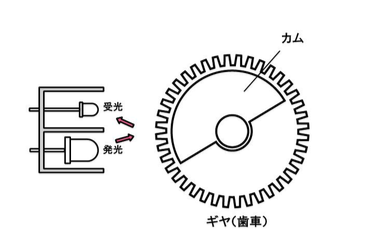
ギアの回転を非接触で検知することができる
さて、これを使ってラズパイでどんなものができるのか?前回は実験的に指が近づくとLEDが光りだすという簡単な実験をしてみました。いろいろと実験をしてみますと、透明なプラバンでも、あるところで反応することがわかりました。傾かせるなど、角度を変えると反応しない場合もあるので、プラバン表面で赤外光が反射して、ちょうど受光部分に入ったのでしょう。透明だからといってセンサも利かないわけではなく、条件や環境でも使い方が制限されるといえます。
少なくとも反応が思った以上に良いので、「この部品は優秀だ!」と、感動ひとしお…あ、ラズパイのしきい値の問題かな?
では、これを使って何ができるのか?何を作れば面白いのだろう?と考えます。物体を検知するので、物体が移動してきて検知するのがこのフォトリフレクタの役割には違いないので、「小さな指先、たった1本で!」と歌いながら、何かが動くというものでもいいのですが、どうも面白さが出ません。とりえず、4個ぐらい並べてみみましょう(と安直に数を増やす作戦…)。
横並びにして、移動を検知するとなにかできるかなぁ?とアタマの中でシミュレーションしてみるけど、イマイチです。きっと、暑さのせいだ!と、夏に愚痴を言ってみるけど、解決はしない。
では、何をもって「面白い」とするか?ここがポイントです。
指とか物体が動くことを一次的な動きとしたら、それをあえて二次的な動きに変えて、そこで検知し、それによって何かをコントロールする、といいのではないか?つまり、直接的に「ボタンを押す」ことでスイッチが入るのでなく、「スイッチが入る」という状態に直感的に結びつきにくいような行為によってスイッチが入ればいい。そうすると、手や指の動きによって思いもよらない行為が展開されるわけです。落語は「緊張と緩和」で笑いが成り立つ、というアレと似ているかもしれません。
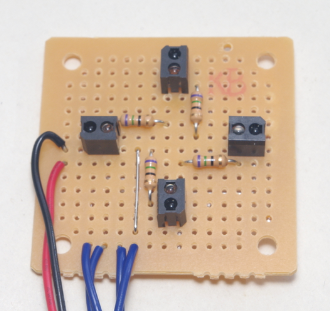
ということで、やはり4個のセンサを並べてみましたが、直線的ではなく、十字型に。これをブレッドボードではなくきちんと基板に取り付けます。基板は部品同士の接続に使いますが、もうひとつの役割として部品の固定という役割があると思っています。グラグラを抑え、外的衝撃にも耐えられるようにするために今回は基板を使います(とはいえ、もちろん限界はあります)。なかにはブレッドボードに部品差し込んで、そのままホットボンドでモールドして固定するというチカラワザを使う方もいるようですが、そこまでするならハンダ付けしたほうがいいような…。
3. 基板設計について
さて、基板設計は意外と面倒だったりします。今回はユニバーサル基板を使いましたが、プリント基板の設計は反対に自由度が高いので設計は楽しいです。とはいえエッチング、穴あけなど面倒な作業もついてまわりますので、どちらがよいかは人それぞれですね。
今回は15×15穴に並んでいるユニバーサル基板を使いました。4回路を十字型に並べるので、1ユニット分は同じ並びがよいでしょう。「ユニット」って言ってもフォトリフレクタと抵抗器だけですが…。
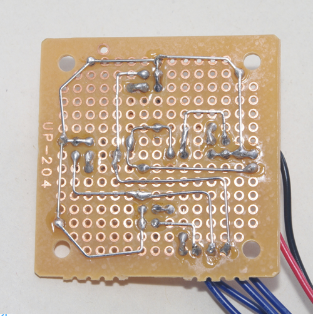
さて、GNDは共通にしたいのでぐるっと回すようにして、ラズパイのGPIOに接続する端子部分はできるだけ1箇所にまとめます。電源などもGPIO入出力と別になるようにまとめました。
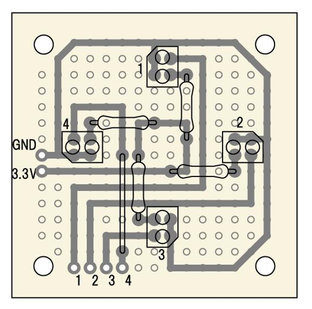
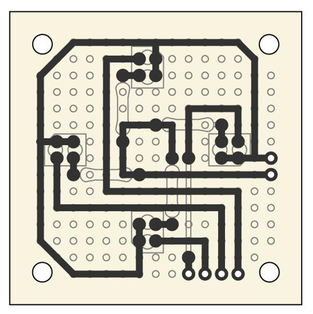
よく間違えてしまう人もいるかも知れませんが、上の図は基板を部品面から見た図になります。ハンダ面、つまり実際のに線でつなげる面では以下のような図になります。
早速ハンダ付けをしていきます。今回はユニバーサル基板を使ったので、部品の端子、スズめっき線などを使ってハンダ付けしていきます。ここで今一度ハンダ付けの基礎を振り返っておきたいと思います。
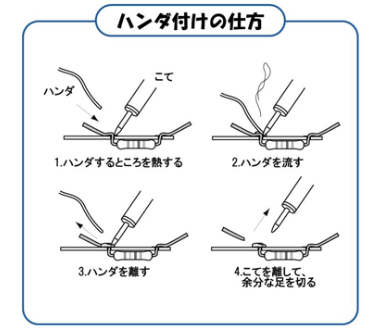
実際には使うハンダごての性能にもよりますし、特にこて先の状況でかなり左右されます。温度調整ができたりするお高い道具はやはりいいですが、私の場合、子供たちに教えることも多いので、子供のお小遣いで買えるような比較的安価なものを使っています。
ポイントとしては、こて先にハンダがきれいに薄くのっている状態で、ハンダすべき箇所を適度に熱することです。この「適度」が一番難しいところですが、これを習得するにはやはり「慣れ」が必要です。ハンダ付けも技術、テクニックですから、トレーニングによって身につけられると思います。
さて、ハンダ付けができれば基板はできあがりです。
私もハンダ付けがうまいわけではないので、お恥ずかしい限りですが、裏面(ハンダ面)はこんな感じです。
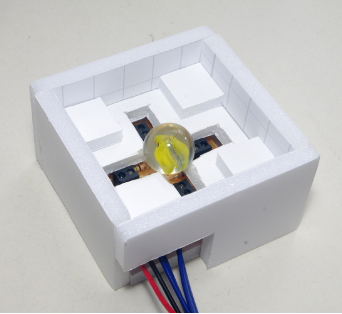
できた基盤をこんなケースに入れてみました。十字形に切り込みを入れ、フォトリフレクタをその中に入れます。この切り込み部分にビー玉を置き、傾けて転がします。転がったところでフォトリフレクタが反応するという仕組みです。カタムキコントローラとでも命名しましょうか。
これをラズパイのGPIOに挿し、使えるようにしましょう。カタムキコントローラで、既出のようにモータを動かしてもよいのですが、まずは一番シンプル且つ基本であるこのネコのキャラクタを動かしてみました。Scratch上でこんなカタチに組んでみました。
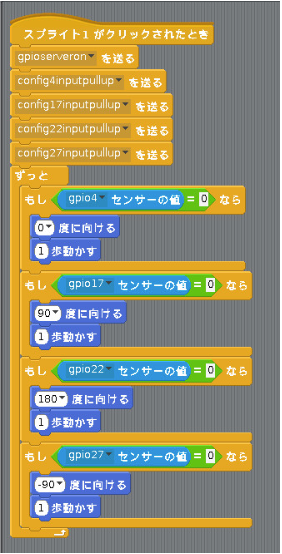
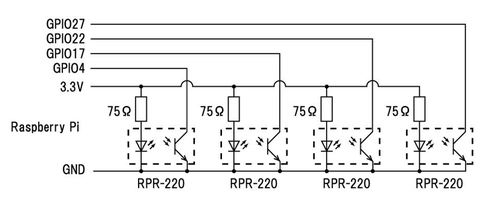
GPIOは4、17、22、27番を使い、それぞれをPullup状態にしておきます。Pullupなので通常センサの値は1になります。フォトリフレクタが反応すればセンサの値は0になります。0になったGPIOに応じてネコが向きを変えて移動するというものです。
傾いた方向にネコが動きました。
まとめ
知り合いにも優秀なエンジニアでありながら、ハンダ付けしたことがないというお方もいらっしゃいます。ハンダ付けという作業自体、やってみると案外面白いものなので、ぜひとも避けないでくださいね。
今回はハンダ付けがメインに見えますが、大切なことは「面白い発想と実現する技術」と思っています。次回は、インターフェイスとしてのモニタ画面の活用を考えていきたいと思います。
フォトリフレクタ(フォトインタラプタ)に関する基礎知識をもっと知りたい方はローム「エレクトロニクス豆知識」をチェック!
今回の連載の流れ
第1回:Lチカonラズパイで、オームの法則・GPIO・トランジスタをちょっと詳しく知る
第2回:Lチカ+モータonラズパイ。より大きな電流の扱い方を知る
第3回:ラズパイを使ったセンサ入力の実験
第4回:センサを使ったおもしろアイテムの簡単工作(今回)
第5回:風のままにキャラクタが動いてグラフィック作品ができる装置の制作
第6回:自然の力をデジタル制御するグラフィック装置の制作







