ヘッダー設定
エンジニアライフにプラス1の情報を



最新記事




デバプラについて
Device Plus(デバプラ)は、半導体・電子部品メーカーのロームによる、ものづくりを愛するエンジニアやエンジニアを目指す方々に情報をお届けするWebサイトです。
フォローして更新通知を受け取ろう
索引ページ
最新記事

第23回全国ロボコン交流会開催レポート後編 学生技術者たちの交流の様子を写真でお届け!
2026年1月17~18日、兵庫県立総合体育館で「全国ロボコン交流会」が開催された。レポート後編となる本稿では、学生技術者のみなさんの交流の様子から全ロボの楽しさをお伝えしたい。「完成度が高い、すごい」と明石高専の機体を絶賛する志茂さん(津山高専2年)。「コロナ禍で技術の継承がすべて途切れてしまった。開発ノウハウを取り戻したくて全ロボに来ています。この機会に吸収できるものは全部吸収したい!」と熱の…

第23回全国ロボコン交流会開催! 世代を超えてつながれる開発者の熱気をレポート
2026年1月17~18日、兵庫県立総合体育館で「全国ロボコン交流会」が開催された。現役高専生ロボコニストが中心となって開催されるもので、今回で第23回目を迎える。「吸収できるものは全部吸収したい」「1~2年生のモチベーションがすごく上がっている」「すぐにでも設計を始めたい」など、熱いコメントが飛び交った。全国最大規模となった「お祭り」の様子を、デバプラからお届けする。 10:30 開場直前! 全…
人気記事



カテゴリー
ROHM ENGINEERING TIPS
回路設計の道しるべ
エンジニアたちの
技術サポートフォーラム
人気技術セミナーを
いつでもオンデマンド視聴
Download Plus
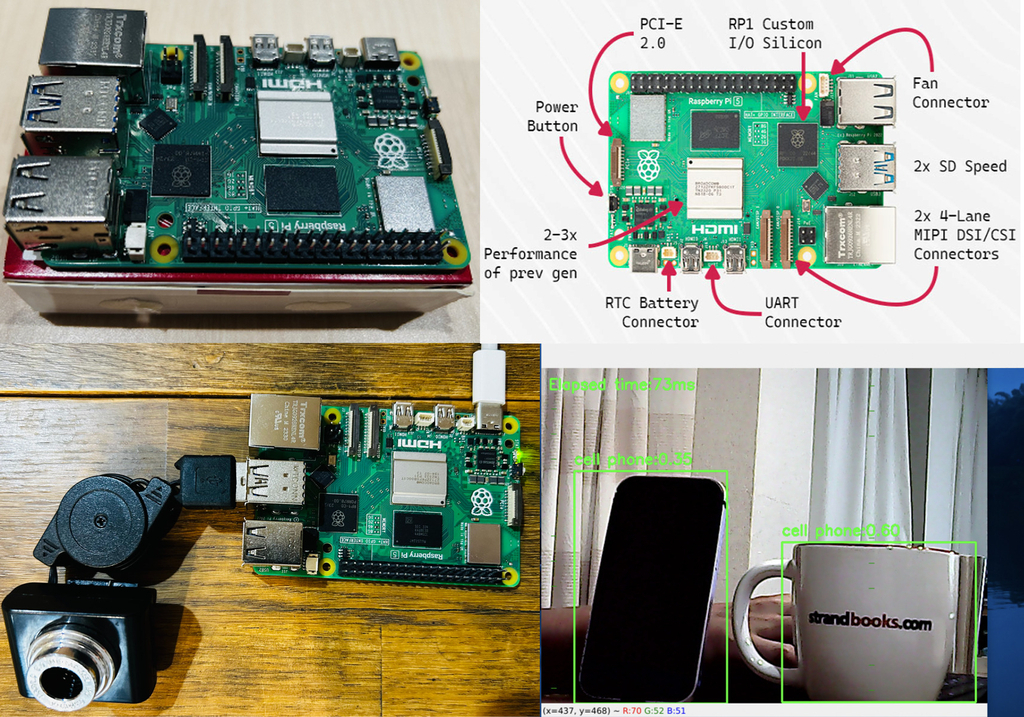
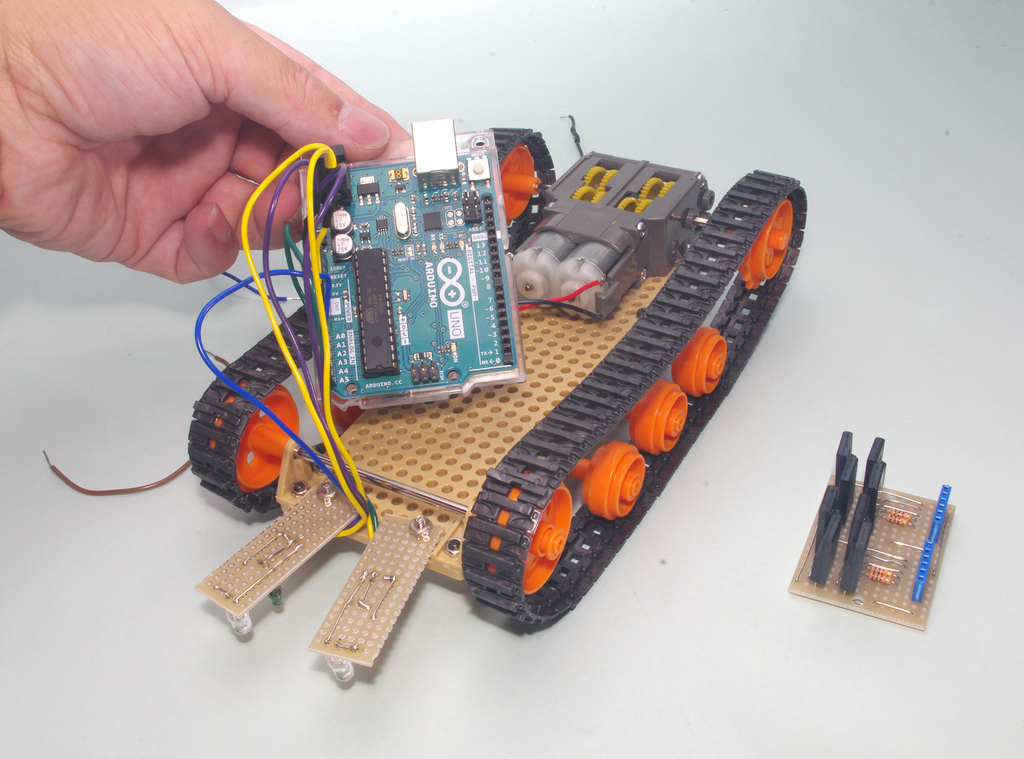
Raspberry PiやArduinoを使った電子工作から、ロボコン出場ロボットを徹底解剖した紹介資料まで!無料ダウンロードできる資料の一覧はこちら!
© Copyright 2025. Device Plus – デバプラ - ROHM.