NHK学生ロボコン2019「グレート・ウルトゥー」は、京都大学の優勝で幕を閉じた。
京都大学は15年ぶりの学ロボ出場、優勝は初となる。NHK学生ロボコンの公式サイトを見ると、西日本エリアの大学が優勝するのは26年ぶり(1993年の関西大学が最後)とのこと。京都大学の強さの秘密は別の機会にお届けするとして、ここでは本大会の振り返りをしたいと思う。
京都大学のジャイアント・キリング

初優勝を飾った、京都大学
今年の学ロボを総括すると、「番狂わせ」の一言に尽きるだろう。技術力云々といった要素とは関係無しに、上級生から引き継がれる環境や試合勘のようなものも重要なロボコンにおいて、やはり京都大学の「15年ぶり」は大きな差であるはずだ。
にも関わらず、事前の動画情報やテストランで圧倒的な迫力を見せた豊橋技術科学大学・東京大学・東京工業大学・長岡技術科学大学ら強豪校が、先述のとおり京都大学との直接対決で敗退していった。
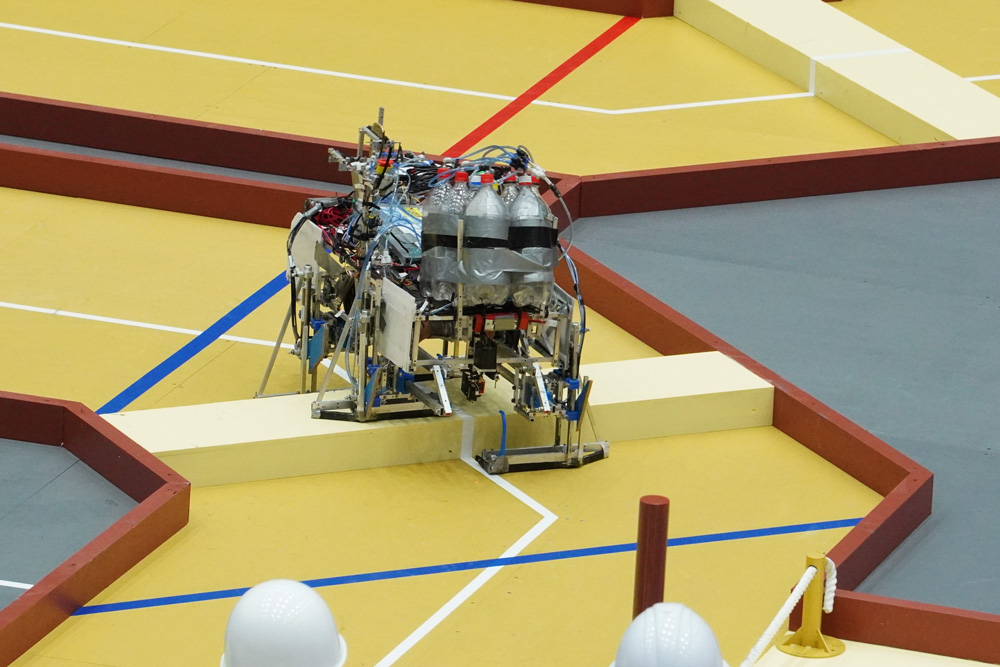
特に悔しかったのが豊橋技術科学大学だ。NHK「サイエンスZERO」で紹介された特徴的なMR2が、大会で本調子を出せなかった。小島瑠璃子さんの「動画上げて!絶対見るから!」に同意した関係者は多いのではないだろうか。
豊橋技術科学大学、特徴的なMR2も本調子出ず
長岡技術科学大学はベストパフォーマンスこそ京都大学をはるかに凌ぐ速さだったが、「リトライすれば抜かれる」という状況でミス、タイムロスをしてしまった。「(京都大学には)順調なら勝てるけれどリトライすれば確実に負けるという状況はプレッシャーだろう」とは、東京大学OBの豊島さんの談。
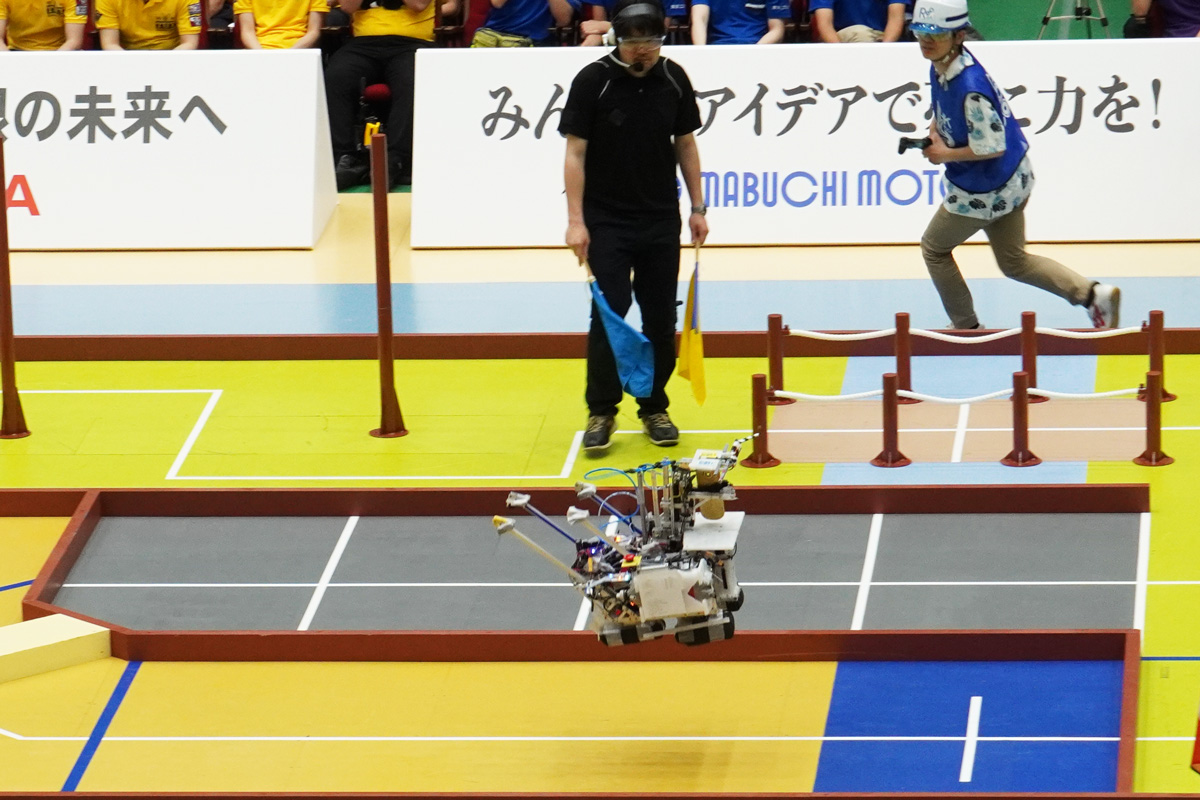
そして、東京大学の敗因は、シャガイの取り込みと射出の制御に起きたトラブルだったという。MR1プログラミング担当の「センサーが付いているのだから、プログラムで対応できた。防げる問題だったのに」という悲痛な声が印象に残っている。「優勝するためのチーム」と自認するRoboTechのメンバー。大きなものを背負っていたと思う。その志を心から讃えたい。

東京大学、MR1のトラブルにより敗退
強豪校はいずれも、すばらしいポテンシャルを持ちながら、淡々と進む京都大学のマシンに敗北していった。
安定性の勝利
対京都大学戦に限らず、勝敗を分けた要因として印象に残るのが、マシンの「安定性」だ。結果論にすぎないが、優勝校の京都大学をはじめ、九州大学や早稲田大学が勝ち上がっていった理由は、スピードよりも安定性・パフォーマンスの再現性にあったように思う。

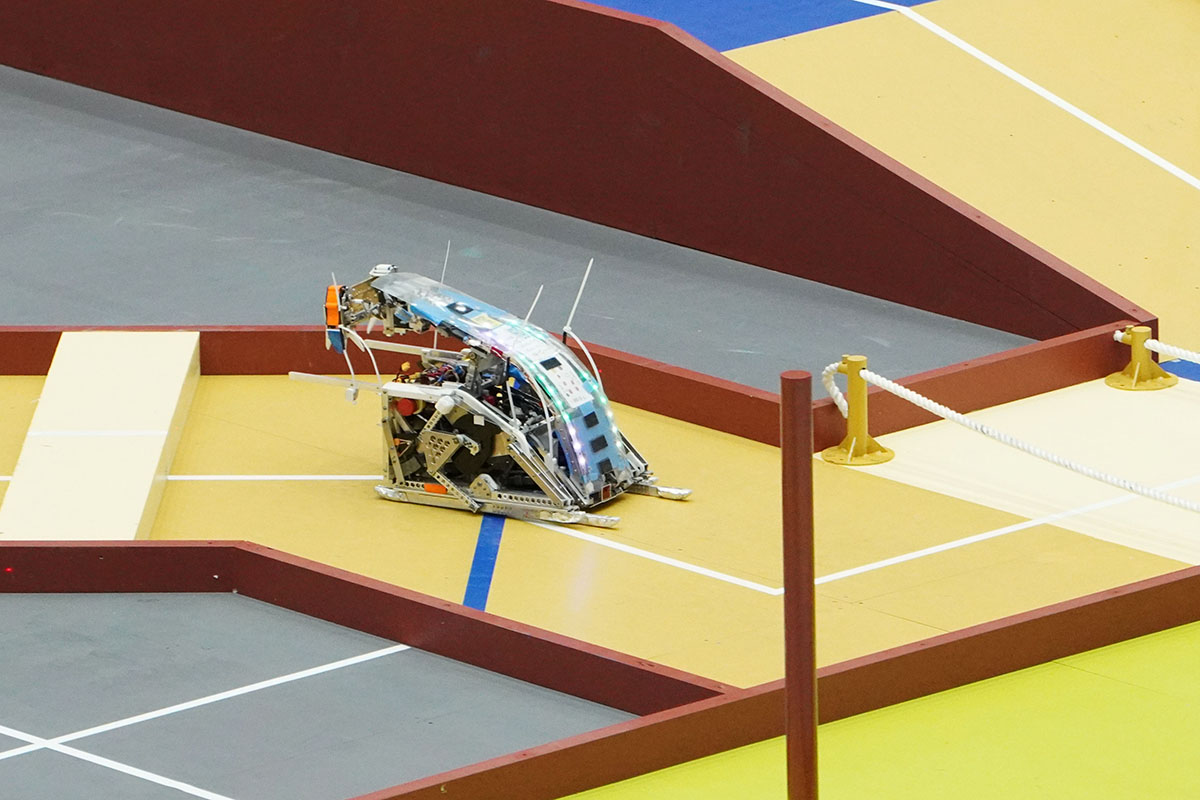
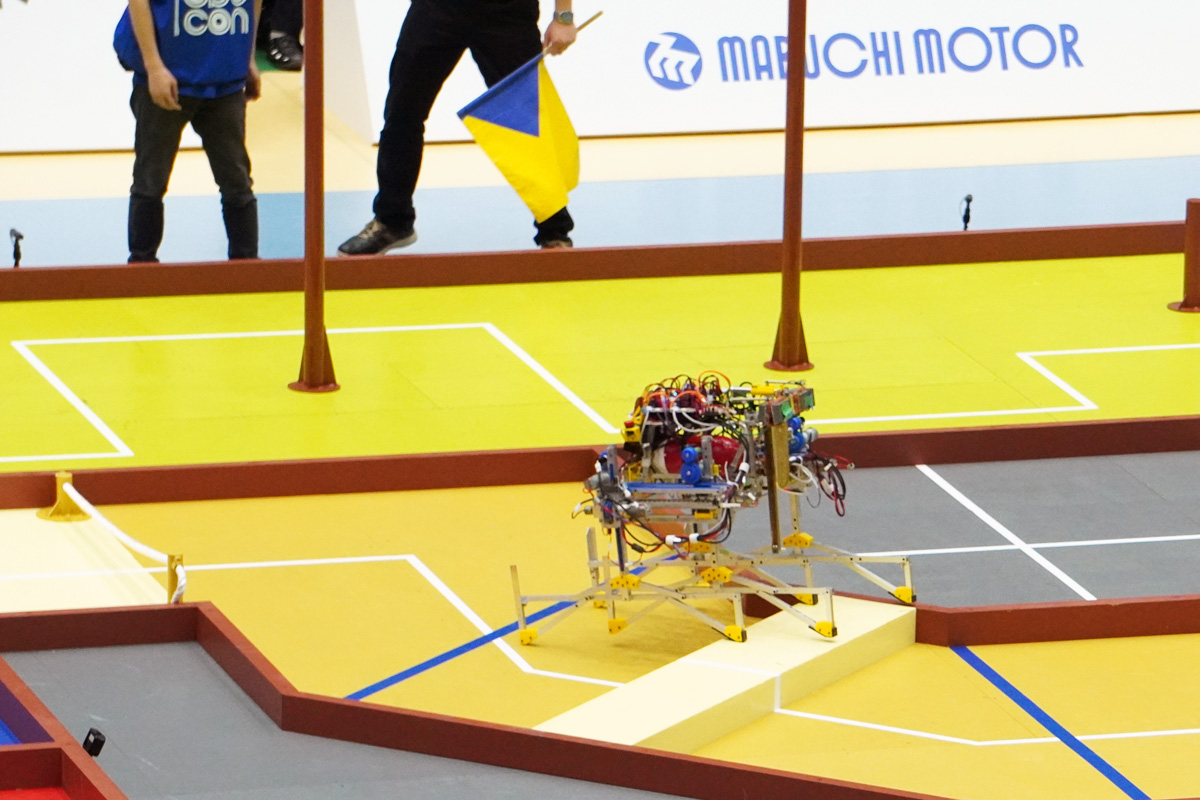
京都大学(優勝)、および早稲田大学(準優勝)のMR2
四本足での歩行は衝撃が大きく、一歩一歩がマシンへの負担になる。東京工業大学OBの谷さんによれば「常に殴られ続けているような状態」とのこと。それを考慮してか、多くのピットで、足と関節に負担をかけないようなメンテ台が設置されていた。それでも試合が進めば進むほど、ダメージの蓄積は深刻化していく。
ロボットへの負荷を感じさせたのが、準決勝の九州大学と早稲田大学のカードだ。九州大学は予選でウーハイを達成、早稲田大学は砕氷船のようにゴリゴリと障害物を踏み越えるパワフルなマシンだったが、両チームとも回を追うごとにトラブルが起きやすくなっていくように思う。早稲田大学のトラブルは九州大学にとって千載一遇のチャンスだったが、九州大学のMR2も満身創痍。勝利をつかみ取ることができなかった。
レアチームの健闘
また、今回目立ったのは「常連校以外」の大学の健闘だ。京都大学の快挙は言わずもがな、慶應義塾大学は正真正銘の初出場にもかかわらず、完成度の高いクモ型ロボットを仕上げてきた。予選での動きに危なげはなく、同型の熊本大学との対決を見てみたかった。
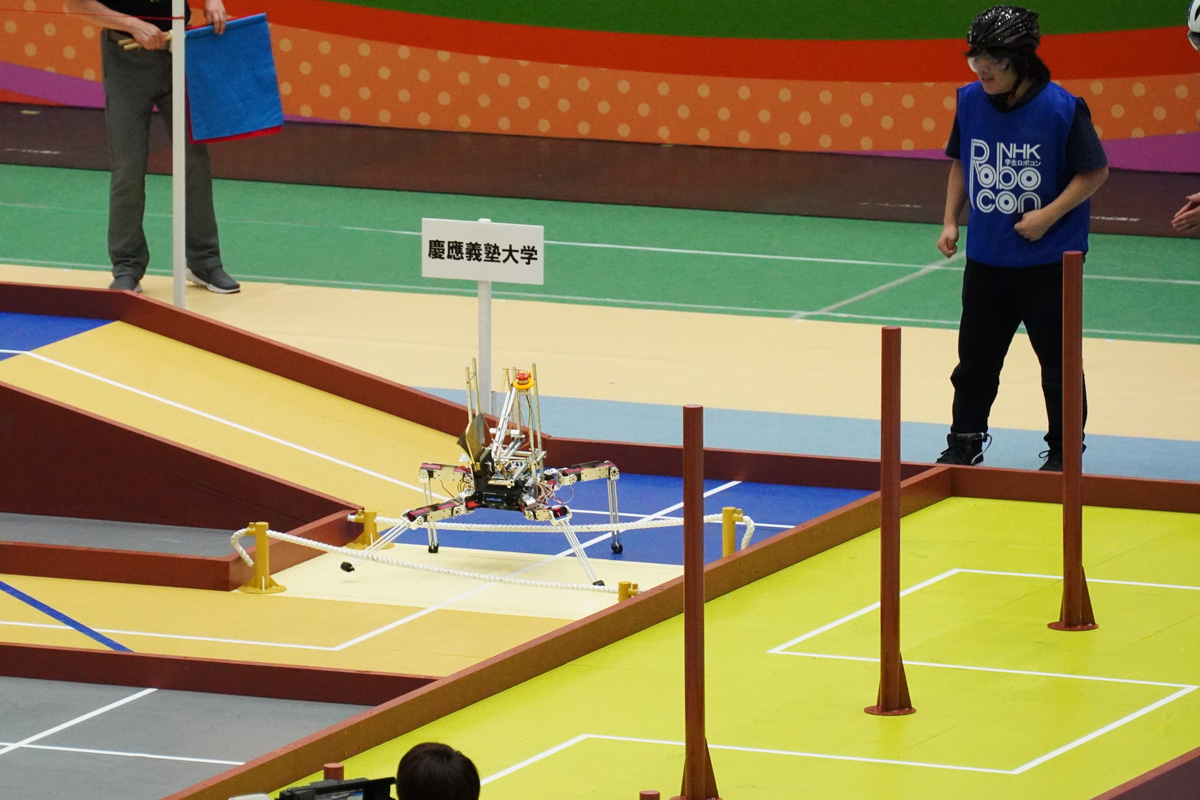
完成度の高いクモ型のMR2(慶應義塾大学)
九州職業能力開発大学は2016年以来、2回目の出場。予選敗退となったが、MR2のメカメカしい動きやMR1のパワフルなシャガイ射出は華やかで、今後が楽しみなチームだ。
ロボットたちのバイオミメティクス
本大会のキモとなったMR2の「四足歩行自動機」は、どことなく生物の歩様を思わせるロボットが多かったように思う。
競技テーマにまっすぐ向き合ったのは、まさにウマのかたちを模したロボットだ。東京大学、東京工業大学、新潟大学、仙台高専がこのタイプを採用、アメリカの「BigDog」を思い出した方も多かったのではないだろうか。
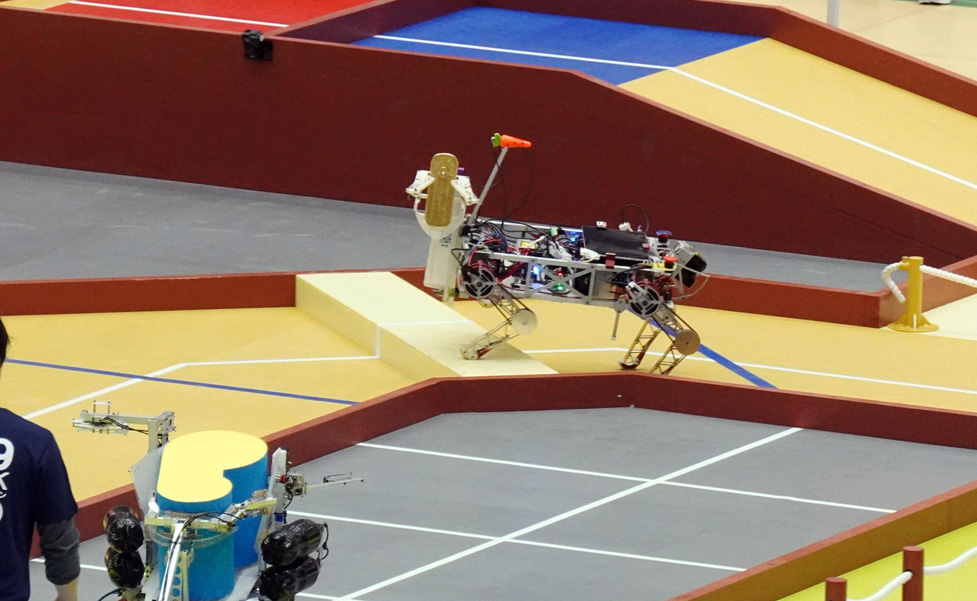
ウマ型のMR2(東京大学)
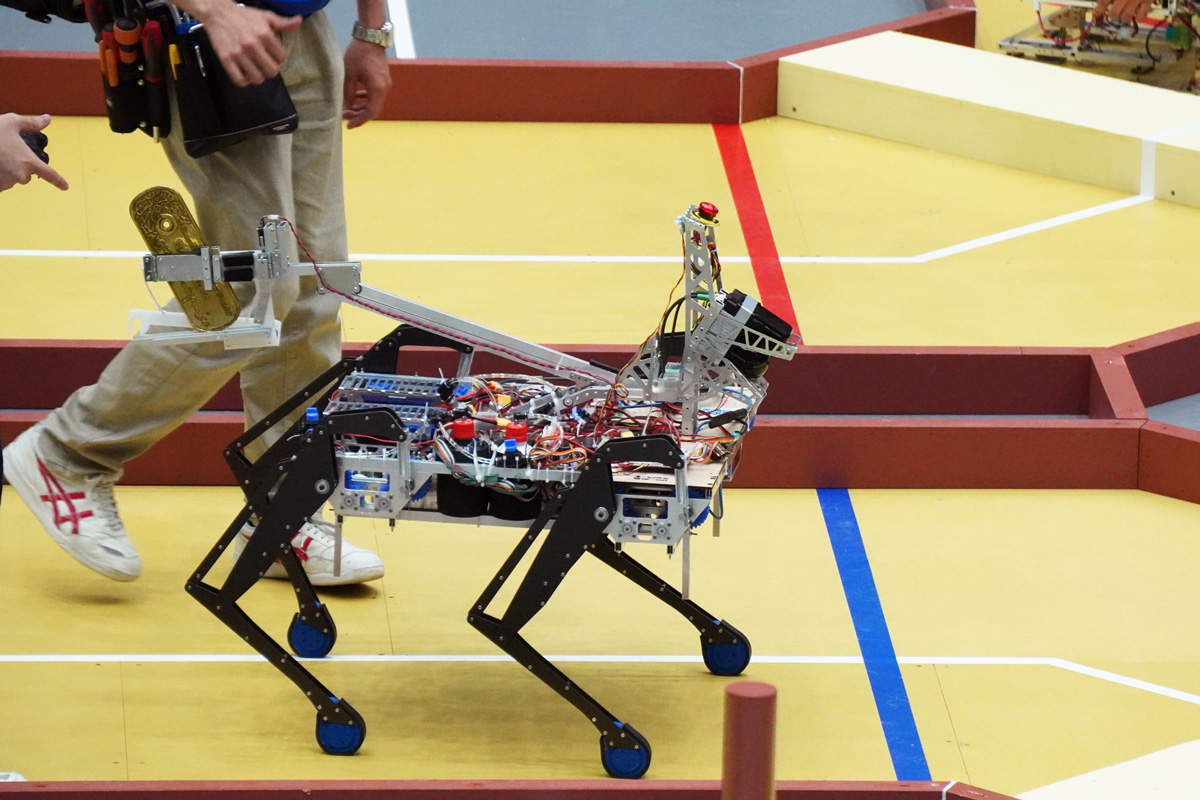
ウマ型のMR2(東京工業大学)
京都工芸繊維、三重大学、大阪大学、そしてものつくり大学は見た目こそロボット的だが、対角線上にある足を交互に運ぶのはウマの「速歩」と同じ歩様だ。安定感のある進み方で、手堅くフィールドを踏破していった。
安定感のある進みを見せるMR2(三重大学)
慶應義塾大学・熊本大学の「クモ型」には、段差越えやロープ越えを中心に、非常にワクワクさせられた。もしルールが「八本足」であれば、もっとヌルヌルしたクモらしい動きを見せてくれたのではないだろうか……?

クモ型のMR2(熊本大学)
東京農工大学の「ウサギ型」はエキシビションで真価を発揮した。愛くるしさと(失礼ながら)意外なまでの精度にグっと来る名機。一昨年の「だんごパンチ」に匹敵するインパクトだった。
ウサギ型、ジャンプを披露するMR2(東京農工大学)
もちろん、生物を模倣したものではないロボットや、身近な動物には存在しない歩きかたのロボットたちも魅力的だった。
東京工科大学は形状こそアメンボに似ているが、原始の生命か深海生物にいそうな動き。立命館大学や金沢工業大学は、機構は異なるものの、テオ・ヤンセンの「ビースト」の動きを思わせるマシン。間違いなく機械の動きであるのに、どこか生命感があったように思う。
テオ・ヤンセンのビーストを思い出す動きのMR2(金沢工業大学)
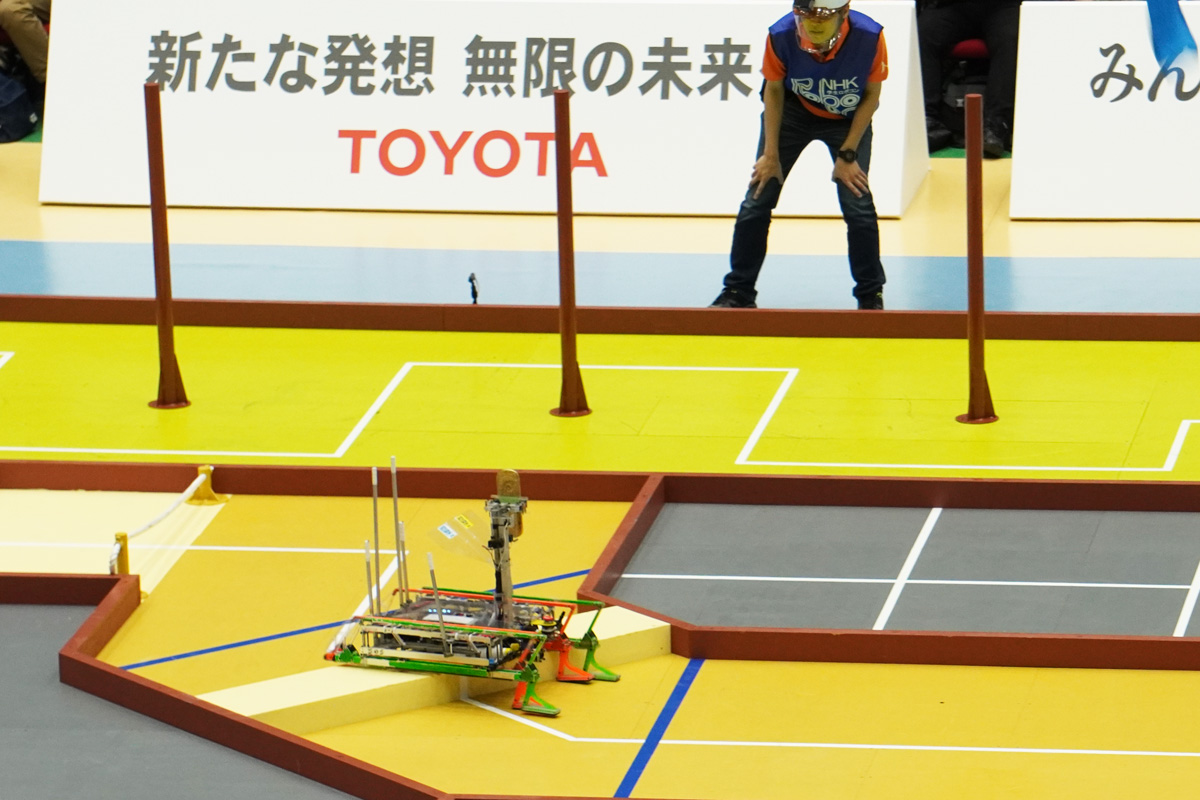
早稲田大学・京都大学と似た機構を採用しながらも車高を低くとり、ロープをくぐる戦略をとったのは長岡技術科学大学と横浜国立大学、そして先述の豊橋技術科学大学。横浜国立大学はロープをくぐる際のメカニカルなおくり機構が魅力的だった(本戦で完全な状態を披露できなかったのが悔しい)。
本番ではお見せできなかったロープエリアの通過です! pic.twitter.com/oUQdWK8ZxF
— 横浜国立大学Robo+ism (@Roboism) May 27, 2019
長岡技術科学大学は、四本足→リンク型→ロープくぐりというハイブリッドな動き。該当する生物のいない、まさにロボットならではの歩様だった。変形はしないが、歩く場所によって足さばきを変える戦略をとったのが富山大学。シャガイ投げの得点勝負に破れたが、段差やロープ越え時の「足上げモード」で魅せてくれた。
ハイブリッドな動きを見せるMR2(長岡技術科学大学)
ロボット開発の「偉大なる中継地」
MR2の特徴に絞って紹介したが、MR1の動きも各校の個性が出ており、「っぽいなあ」と思わされることが多かった。過去の技術は継承され、今後も進化が続くのだろう。
「ウルトゥー」とは、モンゴルの騎馬リレーの名称でもあり、ゲルゲを受け渡す中継地の名前でもある。京都大学は日本のウルトゥーを超え、8月のモンゴル・ウランバートル大会に飛ぶ。しかし、すべてのロボット開発者にとっても、本大会が(終着点ではなく)中継地点であってほしいと思う。すばらしいロボットを完成させたすべてのロボコニストたちのさらなる進化とグレートな未来を祈って、この記事を締める。
皆さん、本当にお疲れ様でした!
デバプラ編集部では、学生ロボコン2019の各賞を受賞したチームに、ロボット開発の経緯、システムの概要、自慢できるポイント等を詳細にヒアリングし、「学生ロボコン2019出場ロボット解剖計画」としてまとめる予定です。どうぞお楽しみに!
学生ロボコン2019記事まとめ
- NHK学生ロボコン2019|京都大学にド直球インタビュー なぜ優勝できたのか?
- 【速報】決勝:NHK学生ロボコン2019
- 【速報】準決勝:NHK学生ロボコン2019
- 【速報】準々決勝:NHK学生ロボコン2019
- 速報 予選3巡目:NHK学生ロボコン2019
- 速報 予選2巡目:NHK学生ロボコン2019
- 速報 予選1巡目:NHK学生ロボコン2019
- 【リアルタイム更新】NHK学生ロボコン2019 本戦
- 予選組み合わせ表&試合結果:NHK学生ロボコン2019
- 学生ロボコン2019 前日ピット速報 4脚ロボットの目覚め編
- 学生ロボコン2019 テストラン速報 4脚ロボットの宴編
- 【リアルタイム更新】NHK学生ロボコン2019 テストラン
- 迫る学生ロボコン2019!ロボット開発の偉大なるリレーを追って、デバプラも全力疾走!






